基于勾股模糊集理论的非致命主动防御系统目标威胁评估*
2022-09-16郭三学王明用
张 琦,郭三学,王明用
(1.武警工程大学,西安 710000;2.广州市声讯电子科技股份有限公司,广州 510000)
0 引言
执勤目标守护越来越多的技术方案采用了非致命主动防御系统,主要由探测、警告、拒止等模块组成,目标威胁评估是智能化决策的重要技术基础工作。目前,目标威胁评估的方法主要有TOPSIS法、多属性决策法、贝叶斯网络法、神经网络法、粗糙集理论法等。这些方法虽然能够综合考虑各类威胁信息,但存在一定的缺陷:TOPSIS 法评估结果不稳定,多属性决策法需要和其他方法结合使用,贝叶斯网络法主观权重对属性权重影响较大,神经网络法的推理依据和过程无法科学描述,粗糙集理论法的逻辑方法和属性约简方法有待进一步确定和优化。勾股模糊集理论能够有效地表示和处理目标的模糊性和不确定性,更能够适用于动态数据分析,弥补了其他方法时间维度的缺陷,使得评估结果更加连续、完整、准确,为指挥决策提供可靠依据,能有效应用于非致命主动防御系统威胁评估。
1 勾股模糊集理论
勾股模糊集理论能够有效地表示和处理各类目标信息中存在的模糊性和不确定性,主要通过构建模糊集、各类算子和科学排序方法得出评估结论。
1.1 勾股模糊集

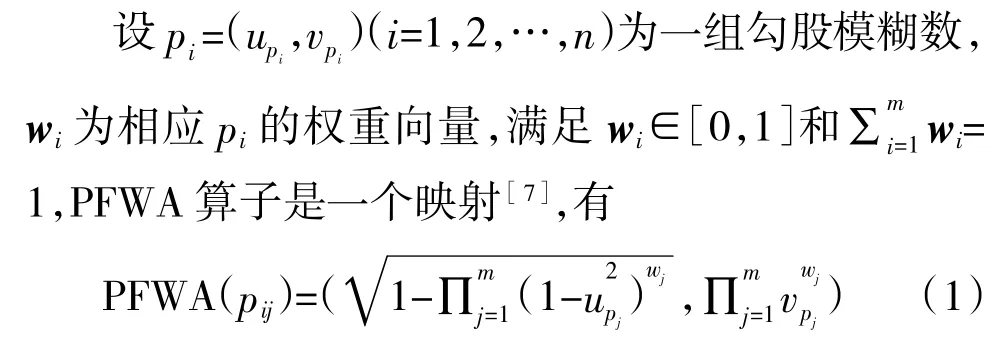
1.2 PFWA 算子
1.3 排序函数

2 威胁评估模型构建
2.1 评估模型

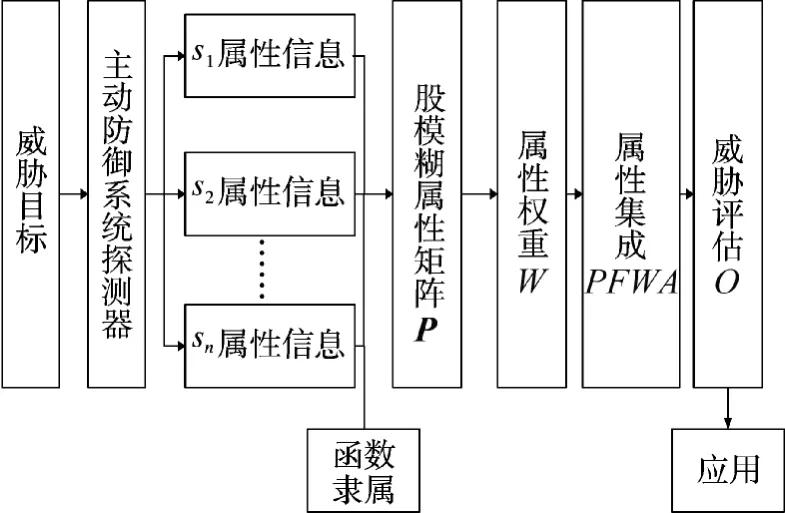
图1 目标威胁评估模型
2.2 评估指标
本文选用高斯型隶属函数对属性值进行转换,属性分为效益性、成本型等。
若x∈[0,f],f 是x所取最大值,高斯型隶属函数表示如下:
对于效益型属性,

对于成本型属性,

目标类型c可以通过探测系统进行确定,不同的目标类型威胁程度不同。对类型属性的量化采用G.A.Miller 的9 级量化法,分别是最大、大、一般、小、最小,通过标尺量化法将目标类型映射为定量的数值,具体的量化标准数值如表1 所示。数字越大威胁程度越大,为效益型属性。由式(3)得目标类型隶属函数为:

表1 量化标准对应值

本文主要对有生目标(人)、运动目标(车辆)两种类型进行分析。
目标距离c是目标到守卫对象的距离,距离越小,威胁越大,其取值范围根据守卫对象地形特点确定,一般确定取值为[0 m,100 m],为成本型属性。由式(4)得目标距离隶属函数为:
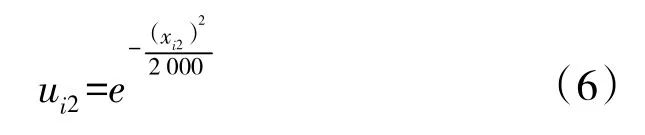
目标速度c是威胁评估的关键指标,速度越大,威胁越大,处置准备时间越短,运动体取值范围为[0 km/h,80 km/h],有生体瞬时速度可以达到40 km/h,取值范围为[0 km/h,40 km/h],为效益型属性。由式(3)得运动目标、有生目标高斯型隶属函数分别定为:

行进角度c是以目标和防御体连线为基线,与目标行进方向形成的夹角。当其取值在[0°,180°]范围内,行进角越小,威胁越大,为成本型属性。由式(4)得行进角度隶属函数为:

2.3 属性权重
设A={<x,u(x),v(x)>|x∈X}为论域X={x,x,…,x}上的勾股模糊集,则A 的勾股模糊熵为
对于勾股模糊属性值,计算属性c的模糊熵E:

属性c的客观权重计算为

利用AHP 法确定主观权重w,式(11)确定客观权重w,将主观权重和客观权重进行组合,最终权重为:
3 系统预警值的确定
3.1 非致命主动防御系统工作模式
非致命主动防御系统采用探测- 警告- 主动拒止的工作模式,如图2 所示。

图2 非致命主动防御系统工作模式
探测:通过雷达探测、目标识别及时发现入侵行为,快速锁定目标。
警告:对进入防卫边界的目标,激发警告防御单元,采用高音喇叭实施警告。
主动拒止:对无视警告而继续深入防卫范围的目标,防御系统主动采取非致命手段拒止驱离。对有生目标主要采用声光、刺激剂、动能等非致命手段驱离。声光非致命武器将强声驱散和强光驱散综合成一体,具有拒止范围大、能量可控、非致命拒止效应显著等特征,是非致命主动防御系统最佳选择。运动目标主要采用电子破胎器、翻板路障机、升降柱等技术措施拒止。翻板路障机结构坚固,承载负荷大,动作平稳,适应恶劣的工作环境,具有很高的实用性、可靠性及安全性,能够满足主动防御需求。
3.2 预警值设计
根据防御体要求及地形特点确定探测、警告、拒止的预警值。
目标类型c:设运动目标类型预警值为8,有生目标类型预警值为3。
目标距离c:车速在40 km/h 以下时,安全距离不低于40 m;翻板路障机全部升起时间为3.5 s。当运动目标以20 km/h 速度行驶时,反应距离至少为20 m。拒止装备布设于防御体之外5 m 位置,因此,设置运动目标警告预警距离设定为40 m,拒止预警距离为25 m。对于有生目标,强光爆闪频率在6 Hz~13 Hz,50 处光源中心照度不小于200 Lux,强声驱散器在1 m 处声压能达到145 dB 以上,声波传播规律,在距离为10 m 处能达到110 dB 以上,从而达到驱散效果,因此,设置有生目标警告预警距离为15 m,拒止预警距离为10 m。
目标速度c:一般道路上车辆行驶速度不大于40 km/h,正常营院内车辆行驶速度20 km/h,因此,设置运动目标警告预警速度为40 km/h,拒止预警速度为20 km/h。有生目标冲刺速度能够达到20 km/h,正常行走速度为6 km/h,因此,设有生目标警告预警速度为20 km/h,拒止预警速度为6 km/h。
行进角c:设定警告预警值为20°,拒止预警角为10°。各属性预警值设计如表2 所示。
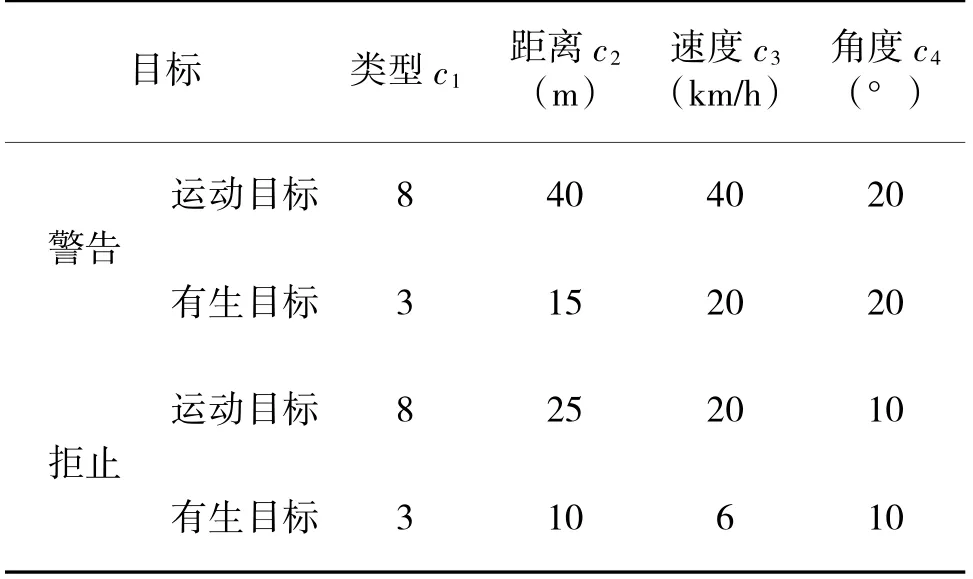
表2 预警属性值xij
3.3 预警威胁值
1)目标模糊属性值
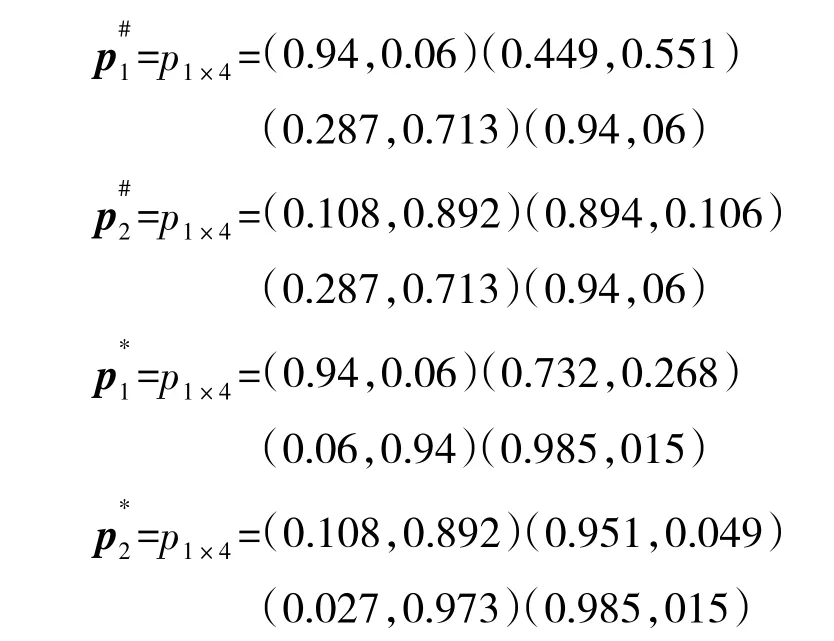
采用高斯型隶属函数将属性值转换成勾股模糊属性值,如表3 所示。

表3 目标模糊属性值
构建模糊属性值矩阵:
2)计算目标组合权重
设w=(0.1,0.4,0.3,0.2)。利用式(11)计算属性客观权重w如表4 所示。式(12)计算其组合权重为w如表5 所示。

表4 属性客观权重wk
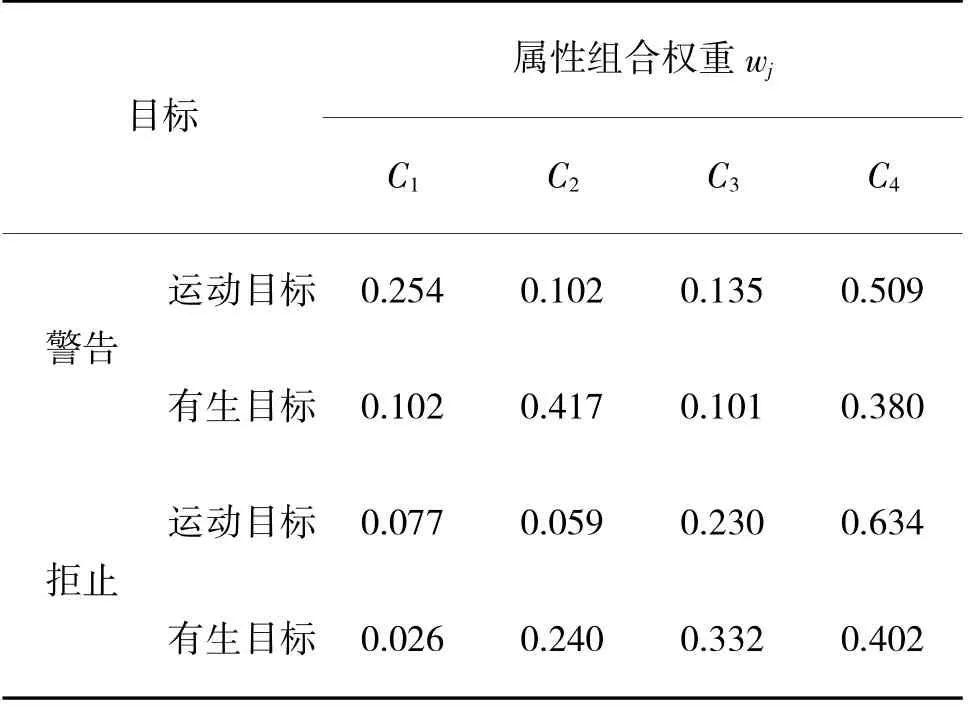
表5 属性组合权重wj
3)目标属性集成
利用式(1)对目标属性进行集成得结果PFWA如表6 所示。

表6 目标属性集成PFWA
4)计算目标威胁值
从式(2),得出警告预警威胁值o、拒止预警威胁值为o如表7 所示。

表7 目标预警威胁值
4 实例分析
4.1 目标威胁值
设主动防御系统探测到两个目标在t,t,t时刻属性值,如表8 所示。

表8 目标属性值xij
采用上述方法计算出目标威胁值如表9 所示。

表9 目标威胁值o(t)
4.2 数据分析
当o(t) 由以上计算可看出,t时刻,o(t)<o,目标正处于防御系统探测监控区域;t时刻,o<o(t)<o,目标进入警告区域,防御系统立即展开警告驱离;t时刻,o(t)>o,目标继续向前行进,构成较大威胁,进入拒止区域,防御系统立即联动拒止装备对目标驱离。 本文将勾股模糊集理论威胁评估方法运用到非致命主动防御系统方案设计中,为系统设计提供了有效的技术手段,通过实例计算分析,结果具有客观性,勾股模糊集理论是比较有效的一种评估方法。5 结论