基于混合高斯模型的运动车辆检测算法研究
2022-09-16邸丽霞彭晴晴邓浩森
邸丽霞,唐 杰,彭晴晴,王 伟,邓浩森
(北方自动控制技术研究所,太原 030006)
0 引言
近年来,国外主战坦克针对超远距离的地面、空中对象检测及跟踪进行了深入的研究,这一动向表明,对象信息检测及跟踪技术的不断发展已成为现代军事指挥控制系统的发展动力之一;在国内,现代化军事建设非常重视精确制导武器的研发,对运动对象的检测、跟踪,由于可鉴别真假目标、精度高、可信度高等优势,具有很高的研究价值。
运动对象检测是其他高级应用如:特征描述、对象分类和对象跟踪等的基础,具体功能是检测视频序列中是否存在相对于背景图像运动的物体。针对运动图像序列的对象检测系统,一般需要通过智能检测和系列算法来排除背景因素,如:天气、光照、阴影及背景中物体的周期性运动(树叶摆动)等的干扰,该技术涵盖了智能人工、模式识别、自控等多个方面,具有广阔的应用前景。
1 背景差分法
背景差分法是运动对象检测的基本方法之一,分为建模背景与检测前景两个步骤。建模背景即通过背景模型的构建还原真实的场景背景,背景模型的好坏决定了对场景中摄像机抖动、噪声、树叶摆动等的抑制程度;检测前景则是通过原始图样与背景图样的差值与阈值的比较,确定运动对象的位置,差值大于阈值的区域为对象区域,差值小于阈值的区域为背景图样区域。该方法可较完整地获取对象区域,算法简单,且运算速度较快,但是背景模型未能实时更新,而在真实场景中,背景在各种因素影响下是不断变化的,需要更好的方法实现背景图样的更新。
2 基于高斯模型的背景差分法
怎样建立模型来充分描述环境中单模态和多模态的事物特性,让模型更加接近真实场景,是用于检测运动对象的背景差分法的研究重点。高斯建模根据具体的场景变化来更新背景,完成前景对象的检测,是一种常用的背景建模法。对于背景相对稳定的场景用一个高斯函数即可形容,而对于色彩相对分散的场景或运动对象则需混合高斯模型来形容。

2.1 模型参数初始化
设图样的平均灰度值为μ,平均均方差为σ,对原始图样的每个像素点的K 个高斯模型其方差及均值初始化,公式如下:
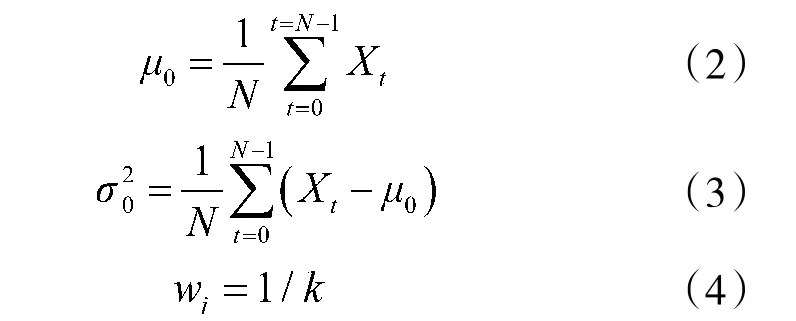
一般取N 为20~100。N 越大,像素点的高斯分布权重越大,方差越小,背景图样越接近真实状态,但相应的运算速度会越低。
通常初始阶段的场景不包含运动对象,第1 帧可用来对模型参数初始化,且帧数递增时模型参数也可随之自适应更新。
2.2 模型参数更新
高斯模型参数应随着场景的变化而实时更新,以此更加贴合真实背景。
1)根据式(5)来判断每个像素点当前的像素值与模型匹配与否。

2)根据匹配结果,对应地更新模型参数:X与其K 个高斯函数若存在匹配,则X与其混合高斯模型匹配;反之,则不匹配。
2.3 背景及前景检测
更新当前帧的所有混合高斯模型参数,按式(6)求权重值。

可将前B 个分布函数当作背景模型,之后的当作运动模型,式中,T 为背景像素点的高斯分布函数权重中的最小值,其取值非常重要,偏小时,模型会成为单高斯模型,偏大时,运动对象会被当作背景点。这里取T 为经验值0.85。
按式(8)将像素值X与前B 个分布函数进行匹配,若X与其中某一个函数相匹配,则该像素点可判断为背景点;若无匹配项,则该像素点可判断为运动对象点。
3 基于混合高斯模型的背景差分法的改进
上面的算法由于要对多个像素点进行多个高斯函数的建立,算法及其复杂,对硬件配置要求极高。且该算法需储存大量图像序列来完成背景建模,此时背景的更新速度会相对较慢,当运动对象的速度或方向突然发生变化,有可能产生误检测,使运动对象出现拖尾;而当运动对象体积过大且速度较慢时,有可能会产生空洞。
针对上述算法的弊端,本文采用了优化方法,即将三帧差分法融入其中。
首先,用三帧差分法来检测变化的区域。

其次,采用面积法确定对象的存在与否。
检测对象的初始,场景中一般不包含对象,但此时仍在进行背景建模及前景提取,浪费了大量系统内存,导致实时性下降;且当有非运动对象的运动物产生时,易发生误检测。因此,采用面积法对三帧差分法得到的前景点进行检测从而得到对象区域,可增强系统的实时性,同时剔除假的运动对象。
逐行扫描变化区域d,统计值为1 的数量,除以整幅图样的像素点个数,得到的值设为阈值a%,当前景区域面积与当前帧的图样面积比大于a%时,认为运动对象存在,继续下一步操作;反之则认为该前景区域为噪声信息或是干扰对象,停止后续操作。本文中,对测试视频的阈值a 取3。
最后,提取运动对象。
若判断出当前图样中无运动对象时,仅将当前图样构建背景模型即可;反之,则需对对象进行匹配与提取。
该算法流程如图1 所示。
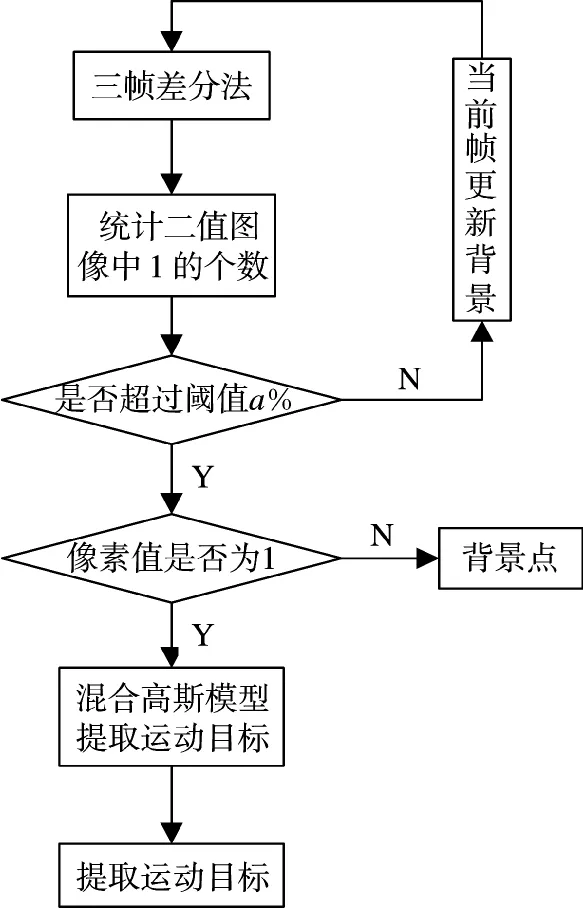
图1 基于混合高斯模型的改进的背景差分法流程图
4 试验结果对比及分析
本文采用的试验视频为IMB 官网下载的测试视频,视频中,一辆车匀速经过,下页图2、图3 是分别用通用方法和优化后的方法得到的对象检测结果。
从图2 中对比可知,基于混合高斯模型的背景差分法检测大而且慢的对象会丢失尾部信息,存在空洞,改进的算法则可检测对象的绝大多数信息,检测效果有较大的提升。

图2 算法优化前后对匀速车辆的实验结果比较
在另外一段视频中,一辆静止的车突然启动,图3 为两种方法得到的对象检测结果。
从图3 中对比可知,方法改进前的实验结果中留有背景图样中车辆留下的“影子”,改进后的试验结果中“影子”明显消失了。
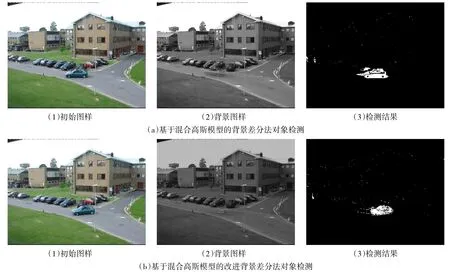
图3 算法优化前后对突然启动车辆的实验结果比较
此外,对文中提到的3 种检测方法进行仿真实验,得出如表1 所示的处理速度及直观效果。

表1 3 种检测方法仿真试验对比分析
由表1 可见,本文中的改进算法在处理速度、检测效果等方面有显著效果。
5 结论
背景差分法处理速度最快,但由于缺乏更新背景的机制,无法处理噪声干扰;基于混合高斯模型的背景差分法对图样中每一个像素点均建立了多个高斯模型,以此形成背景模型,但是计算量大,导致处理速度变慢,无法实时处理;本文提出的用三帧差分法,来优化基于混合高斯模型的背景差分法,优化了混合高斯模型的背景更新机制,提升了处理速度,同时对大且慢及突变速度的对象,检测效果有很大提升,该方法可借鉴于装甲车辆的检测研究。