基于alpha 稳定分布的脉冲噪声模拟方法研究*
2022-09-14李召瑞陈博航吴晓蓓郭宝锋
李召瑞,陈博航,吴晓蓓,郭宝锋
(1.南京理工大学自动化学院,南京 210094;2.陆军工程大学石家庄校区,石家庄 050003)
0 引言
无线通信是指挥控制装备的主要通信方式,无线信号在通信中会受到各种噪声的干扰,从而影响信号传输效果和质量,所以噪声环境的模拟对无线通信系统的性能评估非常重要。如何在实验室产生与无线通信系统实际工作环境匹配的噪声,是通信效能评估领域的热点。
战场范围内,噪声源多样,空间位置多变,传播信道不确定,影响通信背景噪声的因素非常复杂。高斯分布满足中心极限定理,一阶矩、二阶矩有限,易于进行特性分析、参数估计和滤波等处理运算,故传统通信信号处理领域多用高斯分布作为噪声模型。但是大量研究发现,高斯分布并不适合描述可能产生大量数据突变,也就是脉冲性很强的噪声条件,在一些场景中采用高斯分布对噪声建模会出现很大的误差,导致噪声模型失配,造成信号处理算法性能下降,甚至失效。在中国多地、北极、澳大利亚等地的背景噪声测量结果表明,整个噪声体系中,由于大量电气化设施、用频设备的使用,人为的窄带信号干扰和脉冲噪声已经占据主导地位。在战场电磁环境中,特别是短波超短波频段,包含各种随机通信产生的数字脉冲、战场雷达杂波信号、电子对抗装备干扰信号和工业辐射干扰信号等成分,恰恰是随机脉冲性很强的噪声,这样的噪声一般被归属为非高斯噪声类别。非高斯噪声指的是不服从高斯分布的噪声,其特征表现为频繁出现大幅度尖峰类异常值,对于这种呈现短时随机冲击特性的噪声,一般统称为脉冲噪声。非高斯脉冲噪声在很多自然和人为噪声环境中广泛存在,如大气噪声、水声噪声、电话线路噪声、无线通信中的干扰、雷达杂波等。
既定噪声下信号处理的一般研究思路是:建立噪声的数学模型,并进行模型参数估计,从而获得噪声特性描述,根据噪声特性开发信号处理算法。当前描述噪声的模型主要包括两类,即统计物理模型和数学经验模型。统计物理模型从真实物理信号出发,需要通过综合考虑噪声源在空间中分布位置、噪声源发射信号的波形特征、噪声信号在物理信道中的传播特性等因素生成,由于战场环境下噪声源类型多、信号发射随机性强、地形地貌复杂、传播特性多变,建立物理模型复杂度太高,所以这种方法用的比较少。数学经验模型则不考虑噪声产生、传输、处理的物理机理,直接选择适当的数学模型,依据现地观测噪声对模型进行参数估计,拟合其实际物理特性。目前,常用的非高斯脉冲噪声的数学经验模型主要有4 种:高斯混合、t 分布、广义高斯和α 稳定分布。其中,α 稳定分布是一种典型的厚尾分布,在上述脉冲噪声的数学经验模型中,α 稳定分布模型应用最广泛。
α 稳定分布的重要特点是概率分布上的稳定性和概率密度函数(probability density function,PDF)具有厚重拖尾,其分布特性可以匹配物理、化学、生物等学科的多种现象和变化,作为数学模型得到了广泛应用。α 稳定分布最早由Levy 在1925 年提出,丹麦物理学家Holtsmark 将其用于描述星际间引力场的随机波动,并且还估计出对应的特征参数α 为1.5。1993 年,Shao 和Nikias 将分数阶微积分理论与α 稳定分布结合起来,推进了基于分数低阶统计量的信号处理理论的发展。在噪声拟合方面,α 稳定分布不仅被成功用于大气噪声、电话电流噪声的建模,在其他脉冲噪声场景中也获得了广泛应用,例如:水下声学噪声、雷达杂波、电力线通信信道脉冲噪声和无线网络中的网络干扰等。利用α 稳定分布模型进行噪声建模的优势在于:模型数学定义完善,特征函数可解析表达、形式简洁,便于进行理论分析,与统计物理模型具有紧密的联系。
本文以α 稳定分布作为数学经验模型,介绍其性质,通过分析其概率分布,确定其与脉冲噪声的匹配性,研究了α 稳定分布参数估计方法和随机数生成方法,以及参数估计精度验证方法。依据雷达、通信装备固定工作场景的采集数据,对拟合的α 稳定分布参数进行估计,确定了参数范围,为既定噪声条件下通信系统性能度量奠定基础,形成了真实性更强的环境噪声模拟方法与手段。
1 α 稳定分布模型
1.1 定义
首先介绍稳定分布定义:假设X、X是随机变量X 的独立样本,若对于任何正数A、B,都存在正数C 和实数D 满足
α 稳定分布的定义为:针对上述稳定分布的随机变量X,如果存在一个数α∈(0,2],使满足式(1)的A、B、C 满足

那么称X 符合α 稳定分布。α 稳定分布通常没有封闭的概率密度函数解析式,但是存在统一的特征函数表达式:
其中,α 为特征指数,取值范围是0<α≤2,特征指数α 决定了稳定分布概率密度函数的脉冲程度,α 值越小,脉冲性越强,也就是大幅值突变脉冲出现的概率越高,在概率密度分布上表现为拖尾越厚;α 值越接近2,脉冲性越弱,越接近高斯分布,当α=2 时,α 稳定分布退化为高斯分布。所以说,α 稳定分布是高斯分布的广义化形式,高斯分布是α 稳定分布的一个特例。
β 为偏斜指数,取值范围是-1≤β≤1,该参数决定了α 稳定分布概率密度函数的偏斜程度。当β=0 时,α 稳定分布是对称α 稳定分布(symmetric α stable,SαS),β>0 和β<0 时,分别表示分布是左偏斜分布和右偏斜分布,数值大小表征了偏斜程度。
γ 为分散系数,取值范围是0<γ<+∞,该参数用以描述随机变量偏离均值或者中值的程度,其含义和高斯分布中的方差类似。高斯分布情况下,它的值等于方差的一半,即2γ=σ。
μ 为位置参数,用于描述α 稳定分布概率密度函数的绝对位置。对于SαS 分布,当1<α≤2 时,μ与α 稳定分布的均值相等;当0<α<1 时,μ 与α 稳定分布的中值相等。
当μ=0,γ=1 时,α 稳定分布称为标准α 稳定分布;当α=2,β=0,γ=1/2σ时,分布为高斯分布;当α=1,β=0 时,分布为柯西分布。
1.2 α 稳定分布概率密度函数
相对于时域波形,概率密度函数能够更加直观地展示数据的分布特性,α 稳定分布的概率密度只有特殊情况下才能有解析的表达式,很多情况下只能通过数值方法来求取。Fourier 逆变换法和渐进级数展开法可以获取既定条件下分布的概率密度。
1.2.1 Fourier 逆变换法
当μ=0,γ=1 时,α 稳定分布为标准α 稳定分布,通过对特征函数进行Fourier 逆变换,可得到其概率密度表达式

μ、γ 不满足标准α 稳定分布条件时,只有高斯分布、柯西分布、Levy 分布几种情况存在封闭的表达式。
1.2.2 渐进级数展开法
标准α 稳定分布的概率密度函数的幂级数展开式可以获得,并且级数为绝对收敛的。函数表达式为

此处给出的α 稳定分布概率密度函数限制条件较多,多为固定条件下的分布,但是在研究α 稳定分布下的信号处理问题时,这些特例都非常具有代表性。除上述集中特例外,α 稳定分布只可以用数值方法得到概率密度曲线。图1 为不同α 取值下的对称α 稳定分布的概率密度曲线,当α 取值趋近于2 时,其输出信号被局限在一定幅度,α 取值越小,概率密度曲线出现越来越厚的拖尾,表示幅度异常值越来越多,且幅值越来越大。
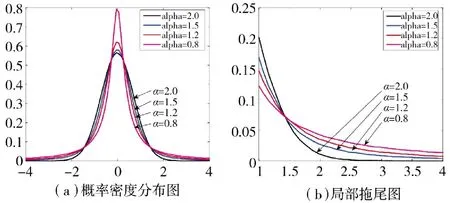
图1 不同α 值下概率密度曲线
综上所述,α 稳定分布模型存在稳定的概率分布,且便于模拟异常值多、异常幅值高的脉冲性噪声,所以本文选择α 稳定分布模型对战场脉冲型噪声环境进行模拟。
2 α 稳定分布随机数的生成
α 稳定分布随机数的生成是一种噪声模拟实现方法,本文研究的一个主要内容就是α 稳定分布随机数生成方法。基于Janicki-Weron(JW)算法可得到稳定分布随机数。当α≠1 时,应用下式

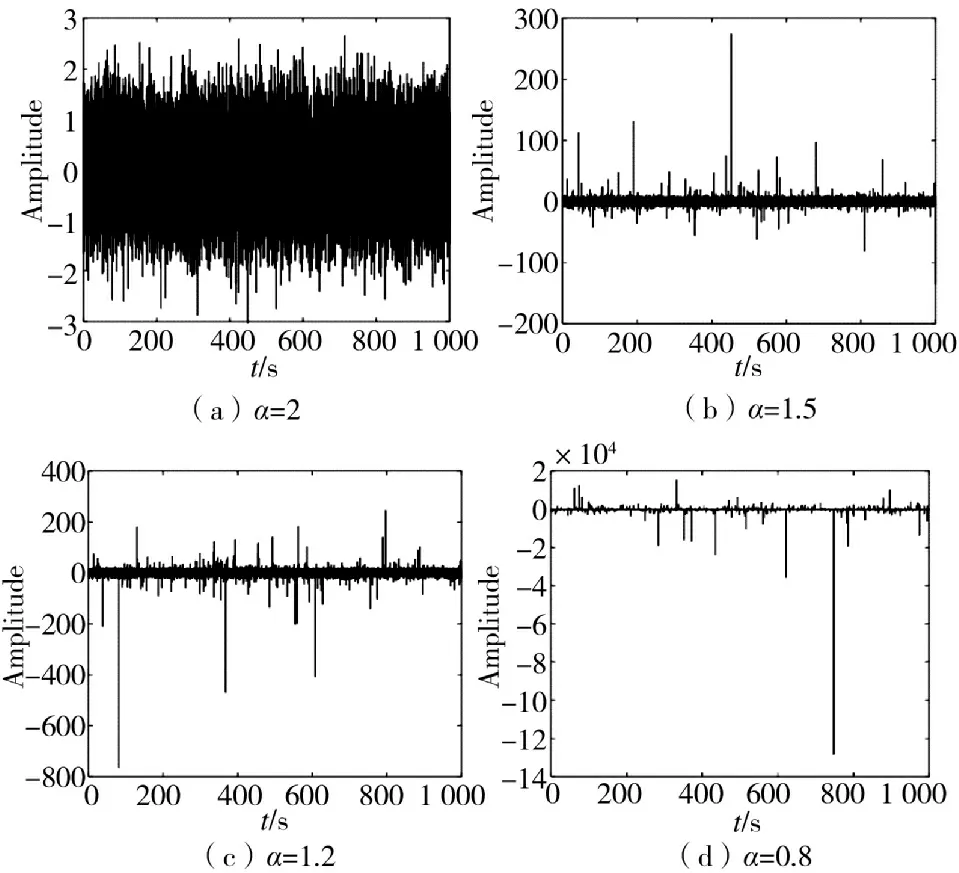
图2 β=0,γ=0.5,μ=0 时,不同α 值时生成的α 稳定分布随机数时域图
3 α 稳定分布参数估计
在进行通信信号处理的相关算法研究时,可以用α 稳定分布模型产生所需的噪声数据,但是α 稳定分布的参数选取不同,产生的噪声数据差异非常大。为提高模拟噪声的针对性、真实性,需要用α 稳定分布模型去匹配真实战场环境的噪声分布,这涉及到了噪声模型参数估计的问题。解决问题的思路是,针对特定场景采集到的噪声信号,首先进行非高斯性判定,确定采集的环境噪声是否为非高斯脉冲性噪声;然后依据实采数据进行参数估计,确定参数的取值范围,后期实验即可依据估计结果进行噪声模拟,以此增强噪声的真实性。噪声对称与否,参数估计的算法不同,所以参数估计前还需要通过正、负数值统计进行对称性判定。本文主要以对称α 稳定分布为例开展研究,即β=0;μ 是噪声概率密度函数的位置参数,仅表征左右平移特性,对噪声性质没有影响,所以下文主要研究α、γ 的估计方法。
3.1 分数阶矩法参数估计
随机变量统计矩包含丰富的信号特征,高斯分布的统计矩可以从零阶一直计算到无穷阶,一阶矩、二阶矩可用来分析服从高斯分布的信号。但α稳定分布由于存在大量脉冲值,不存在有限的方差,高阶统计矩更是不存在,分数低阶矩理论(fractional low order moment,FLOM)为α 稳定分布的参数估计提供了有效的分析方法,本文主要采用分数阶矩法实现参数估计。针对脉冲型噪声的参数估计,本文先通过时域统计法,选取对称型噪声,基于对称α 稳定分布模型实现噪声的参数估计。
3.1.1 对称α 稳定分布分数低阶矩定义

式(9)中,γ 是分散系数,满足γ=σ,C(p,α)是参数p和α 的函数,与X 无关。1995 年,Ma 和Nikias 提出了分数负阶矩的定义,可表示为

3.1.2 分数阶矩法参数估计
变换可得到参数α 的估计式
针对已知样本数据进行参数估计时,有
3.2 参数估计精度验证
针对参数估计的可信度问题,以已知的α 稳定分布随机数作为对象,利用分数阶矩法进行参数估计,分析参数p、样本点数目、α 取值不同对参数估计的影响,比较参数估计值与理论值的差异,达到评估参数估计精度的目标。本节以对称α 稳定分布模型α 值的估计为例进行分析,斜α 稳定分布的评估方法与此类同。
3.2.1 参数p 取值对α 估计值的影响分析
p 取值不同,会影响α 值的估计精度,在p 取不同值的条件下对α 进行估计,分析得到在不同条件下p 的最优取值范围。应用JW 方法,生成α=0.8,β=0,γ=1,μ=0 的稳定分布随机数,样本点取10 000个,分别在p 取不同值的条件下进行参数估计,可多次估计取均值,结果如图3 所示。
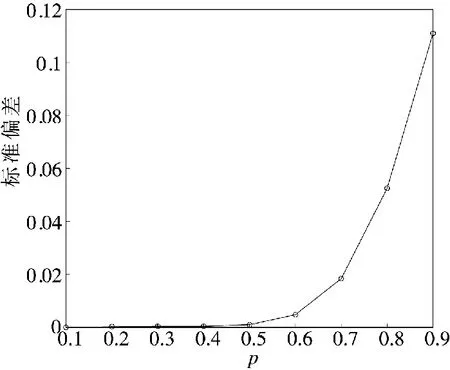
图3 p 取不同值对α 值估计的偏差
由图3 可以看到,p 值越小,估计值精度越高,当取值大于0.4 后,估计值偏差明显增大,与理论分析结果相符,所以,p 的最佳取值范围为0~min(α/2,1),并尽量取较小值。
3.2.2 样本点数目对参数估计值的影响分析
同样应用JW 方法,生成α=0.8,β=0,γ=1,μ=0的稳定分布随机数,改变样本点数目进行参数估计,结果如图4 所示。
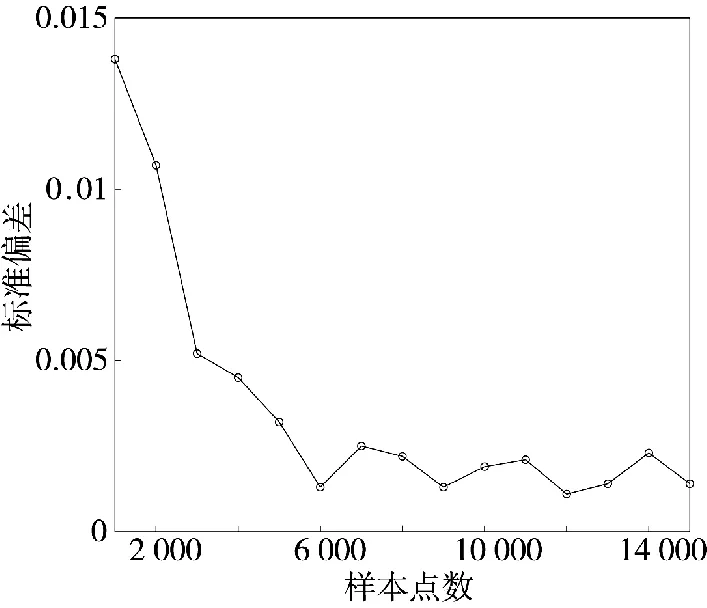
图4 不同样本点数对α 值估计的偏差
由图4 可以看到,样本点越多,估计精度也越高,符合一般规律。但是随着样本点增多,计算量也会加大,根据统计结果,取样本点为5 000 以上,此时参数估计误差较小。
3.2.3 α 取值对参数估计值的影响分析
α 取不同的值,对其本身的估计结果也会产生影响。应用JW 方法,生成β=0,γ=1,μ=0 的稳定分布随机数,进行参数估计,可多次估计取均值,结果如图5 所示。
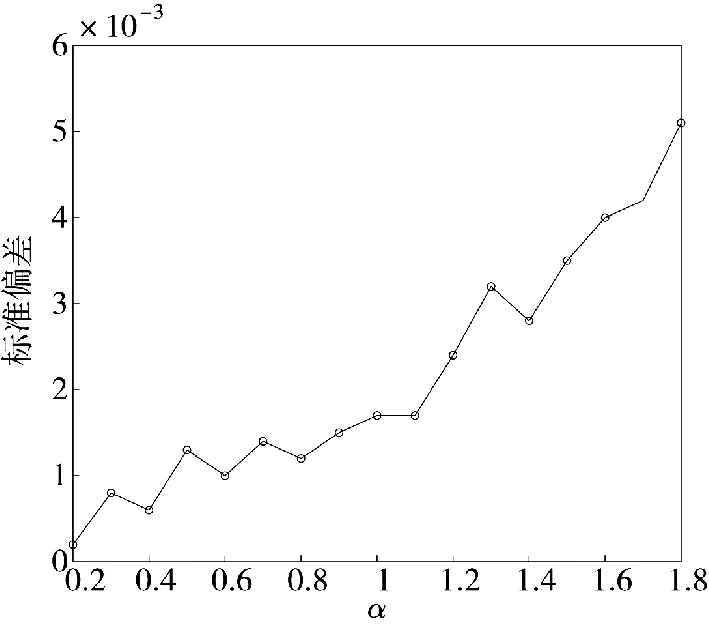
图5 不同α 取值下α 值估计偏差分析
由图5 可知,随着α 增大,参数估计的误差也越大。得到α 的估计值后,根据式(16)即可计算出γ 的估计值,篇幅所限,本文不再详细阐述。分析可得:p取值越小,γ 的估计值越准确,样本点越多,估计精度也越高,γ 值越大,估计值与实际值的偏差越大。
3.3 基于实采数据的模型参数估计
3.3.1 环境构建
本次采集环境使用的装备包括3 辆指挥车、1部中低空目标指示雷达、1 部战场活动目标侦察雷达,以及短波超短波电台若干。应用RFBOX-6G 型射频信号采集记录回放仪作为采集设备,针对超短波波段,采样带宽设为100 MHz~500 MHz,采样率为240 MSPS~1 000 MSPS,进行了长达1 h 的数据采集。采集场景如图6 所示。
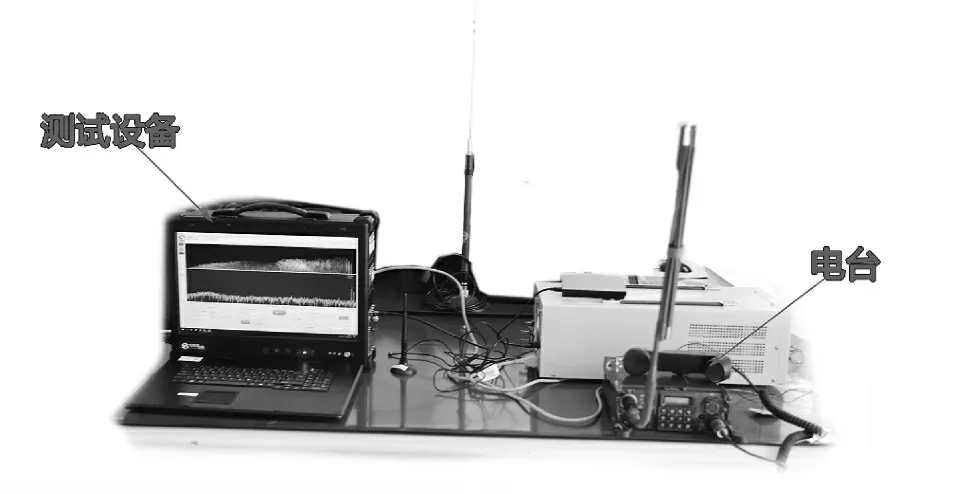
图6 战场环境数据采集场景图
3.3.2 采集结果分析
针对装备关机、电台开机、雷达开机、电台发射、雷达发射等装备不同工作模式采集环境噪声数据,进行记录并存储。数据采集结果示例如下页图7 所示。

图7 数据采集结果示例
针对采集的数据进行参数估计,为保证随机性,主要采用从30 min 的采集数据中序列截取的方式,综合考虑数据特征抓取与计算量的平衡,令截取数据点数N=100 000。分别进行50 次和500 次估计,结果如图8、图9 所示。
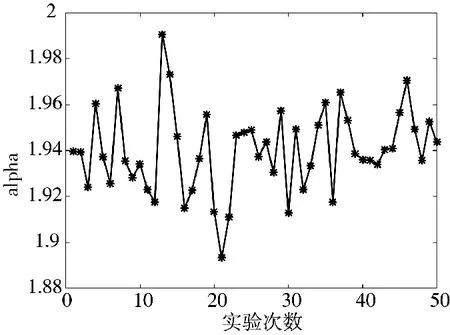
图8 50 次实验参数α 估计结果

图9 500 次实验参数α 估计结果
实验结果可知,由于用频设备的信号发射是在以min 为尺度情况下实施的,大部分时间是没有发射信号的,所以很多情况下,α 的取值多在接近2 的较大值范围内,得到的α 值在1.88~1.98 之间,如图8 所示。图9 选取有辐射信号情况下进行参数估计,可明显看到脉冲性特征,但是,即使在近距离大功率的条件下,参数α 估计值也很难低于1.5,所以后面针对α 稳定分布噪声下通信系统性能研究,以主要针对α>1.5 的情况开展为宜。γ 值的估计与采集点位置、辐射源类型等密切相关,本文估计值多在0.3~0.8 之间,能够体现出与距离、辐射功率等指标的相关性。
4 结论
本文针对战场环境噪声特点,选用α 稳定分布作为噪声模型,研究了α 稳定分布随机数产生方法和参数估计方法,针对特定装备工作场景采集的噪声数据进行参数估计,并分析了参数估计精度,量化得到了模型参数取值特征和范围,根据参数范围可产生对应工作场景的噪声数据。本文提出的噪声模拟方法和形成的量化结论,对提高电磁环境噪声模拟的针对性和真实性具有重要意义。