飞行器目标跟踪中的改进自适应滤波算法
2022-09-09王小虎张志健
兰 天 王小虎 张志健
北京控制与电子技术研究所,北京 100038
0 引言
现今,目标跟踪领域对跟踪精确性、机动适应性都有更为严格的要求。目标运动模型作为描述运动变化的根据,其准确性对跟踪效果产生很大影响。目标运动模型的建立需考虑2个因素:一是含有尽量少的未知参数,以减轻计算负担,提高估计精度;二是有一定的机动适应能力,以提高滤波器的稳健性[1]。迄今最具影响力的机动目标模型就是时间相关模型及其一系列修正,这些模型的共同特点是将目标的机动认作是时间相关的有色噪声序列而非统计独立的白噪声序列作用的结果。我国学者周宏仁提出的“当前”统计模型是目前较好的实用模型[2],该模型认为目标在做机动运动时,它的加速度取值在一定的区间范围内,即只能在确知的“当前”加速度的邻域内[3],其在跟踪机动目标时有明显优势,然而算法的模型参数需要根据经验提前假定,滤波性能受模型参数的影响较大[4-5]。
经典“当前”统计模型无法更改目标机动频率及加速度方差,周宏仁由此提出“当前”统计模型自适应滤波算法(AF),利用目标加速度最大值得出加速度方差自适应算法,但该算法认为目标运动模式保持不变。对此,国内外专家学者提出一系列自适应算法对“当前”统计模型进行改进,其中比较有代表性的改进方式主要有3种:设置运动变化门限、训练BP神经网络以及推导计算自适应参数。
文献[6]通过对新息向量定义预测观测值与观测值的马氏距离描述目标运动方式,当马氏距离超过某一预设门限时,定义目标发生机动,并且不再预先设立加速度最大值,而是通过距离与加速度的线性关系推导出加速度方差的表达形式。此种方法可以将传统“当前”统计模型中的预设参数进行自适应调整,但是对于预定门限的确定是经验取值,并且不能够反映未达门限时的弱机动状态。文献[7]通过神经网络将认知结构嵌入“当前”统计模型,通过对目标运动特性的实时感知,输出一个机动调整因子来加权加速度极限值,从而减弱模型参数提前假定不合理所带来的影响。但是此类神经网络算法的训练往往需要离线进行,难以适用于多变的机动情况,并且在学习样本的选择与神经网络本身参数选择上存在一定困难。文献[8-9]通过观测值与预测值间的关系推导出加速度方差的线性表达式,并引入修正因子进行修正,避免了预设最大加速度的问题,但引入修正因子后只能反映目标运动的变化趋势,无法真实对应目标运动状态。文献[10]通过滤波残差与收敛系数对机动频率进行补偿,并结合交互式多模型算法对加速度方差进行自适应计算,实现了机动参数的自适应调整,但是其收敛系数的确定模糊,通过残差进行补偿的方式还可能令机动频率值取负。
为解决上述问题,本文根据机动频率及加速度方差的自适应计算提出一种目标跟踪中的改进自适应滤波算法,仅用上一步速度及加速度量进行自适应计算即可。通过稳定性分析及仿真模拟验证该算法的有效性,证明该算法具有较高的稳定性并可有效提高跟踪精度。
1 基于卡尔曼滤波的改进自适应滤波算法
“当前”统计模型预设参数固定,但实际目标运动具有时变性,经典算法无法反映目标真实运动状态。若模型的机动频率及加速度方差可自适应匹配实际运动情况,则能有效提高跟踪性能。本文提出一种机动频率与加速度方差自适应调节算法,根据上一步滤波结果实时调整机动参数。
1.1 机动频率自适应算法
“当前”统计模型的状态方程和量测方程为:

(1)
卡尔曼滤波方程为:
(2)
随机机动加速度符合一阶时间相关过程:
(3)


(4)
可以写出如下的状态方程:

(5)
式中:α为机动时间常数的倒数,即机动频率。
本文基于机动频率计算式,提出改进算法:
对式(4)两端进行积分,得到:
(6)
对式(6)两端求期望值:

(7)
在“当前”统计模型中,有:
(8)
将式(8)代入式(7),可得:
α=
(9)
机动频率非负,对式(9)取绝对值,得到机动频率自适应表达式:
α=
(10)
机动频率变大的物理含义为加速度变化加剧,两时刻加速度相关性减弱。由式(10)可知,当目标作较大机动时,前后两时刻目标速度及加速度差值变大,机动频率应相应增大。当目标做弱机动时,目标的机动频率减小。通过式(10)计算的机动频率变化趋势与实际物理情况相符。
根据文献[2]中提供的经验取值大小,本文将机动频率的取值范围设定为(0,1]。当机动频率α在(0,1]之间取值时,直接影响过程噪声矩阵Q中的各项元素,如图1所示:

图1 过程噪声矩阵中各项值随机动频率变化曲线
图中表示曲线为Q中各项值随α在(0,1]之间取值变化趋势,可以看出Q中各项随α变大而逐渐变大,其物理意义为:当α逐渐变大时,目标相邻时刻机动相关性逐渐降低,状态方程预测的状态量可靠度降低,增益量Kk变大,滤波过程更加信赖观测值,符合滤波过程真实情况。
当目标处于静止或常规机动情况(匀速、匀加速运动)时,加速度不发生变化,此时由式(10)计算的机动频率稳定性无法保证,所以在对目标进行滤波时,首先通过观测量判定目标运动状态是否为弱机动,当认定目标进行匀速运动、匀加速运动或静止时,将α认定为小值。
1.2 加速度方差自适应算法
“当前”统计模型的加速度的方差表达式为:
(11)

由于AF算法预先设定各方向最大加速度值,当目标进行弱机动时,导致加速度方差变大,滤波收敛性差。由此,本文对加速度方差的表达形式进行改写,提出一种新的加速度方差自适应表达式,提高滤波收敛性。

目标在k时刻的位置一步预测估计值为:

(12)
目标在k时刻的位置经过新息修正后为:

(13)
则在k时刻目标加速度变化量可表示为:
(14)
机动加速度方差为:
(15)
(16)
有下式:

(17)
则在每一离散的时刻,有
E{[a-E(a)]2}=(Δa)2
(18)
联立式(14)、(15)和(18),得到改进的加速度方差自适应算法:
(19)
当目标的加速度减小时,下一时刻机动加速度取值的分散程度将增大,这意味着目标下一时刻加速度将在一个较大范围内变化。通过式(19)计算出的加速度方差符合该物理意义。
2 改进算法特性仿真校验
采用二维平面目标运动对MAF算法进行分析。在评判算法效能上采用均方根误差(RMSE)统计指标:
(20)

仿真场景:假设目标在XOY平面内沿半径为100m的圆做速度为2πm/s2、时间为100 s的匀速圆周运动,然后沿X方向做加速度为1 m/s2、时间为50s的匀加速运动,同时沿Y方向相对静止,进行不同条件下(采样频率、信噪比大小)仿真模拟。仿真中AF算法预设机动频率为0.2,目标最大加速度为10m/s2。在此仅对X方向目标运动状态进行分析。
2.1 改进算法稳定性仿真校验
理论表明,MAF算法在计算时需要采用上一步数据进行计算,在采样频率低且信噪比低时可能导致失稳。针对该种情况,进行MAF算法在低采样频率下的稳定性分析。
若滤波系统完全随机可控矩阵及完全随机可观矩阵满秩,则滤波系统稳定[11]。系统的完全随机可控矩阵和完全随机可观矩阵为:
rank[Φn-1ΓΦn-2Γ…Γ]=
(21)
(22)
“当前”统计模型要求机动频率α取值大于0,由式(21)及(22)计算出的滤波系统完全随机可控、完全随机可观矩阵始终保持满秩,滤波系统稳定。
仿真1:低采样频率,低信噪比
采样周期T=1.0s,位置观测误差为均值为0、方差w为100的白噪声序列,测试低采样频率、低信噪比环境下的算法稳定性,仿真曲线如图2。
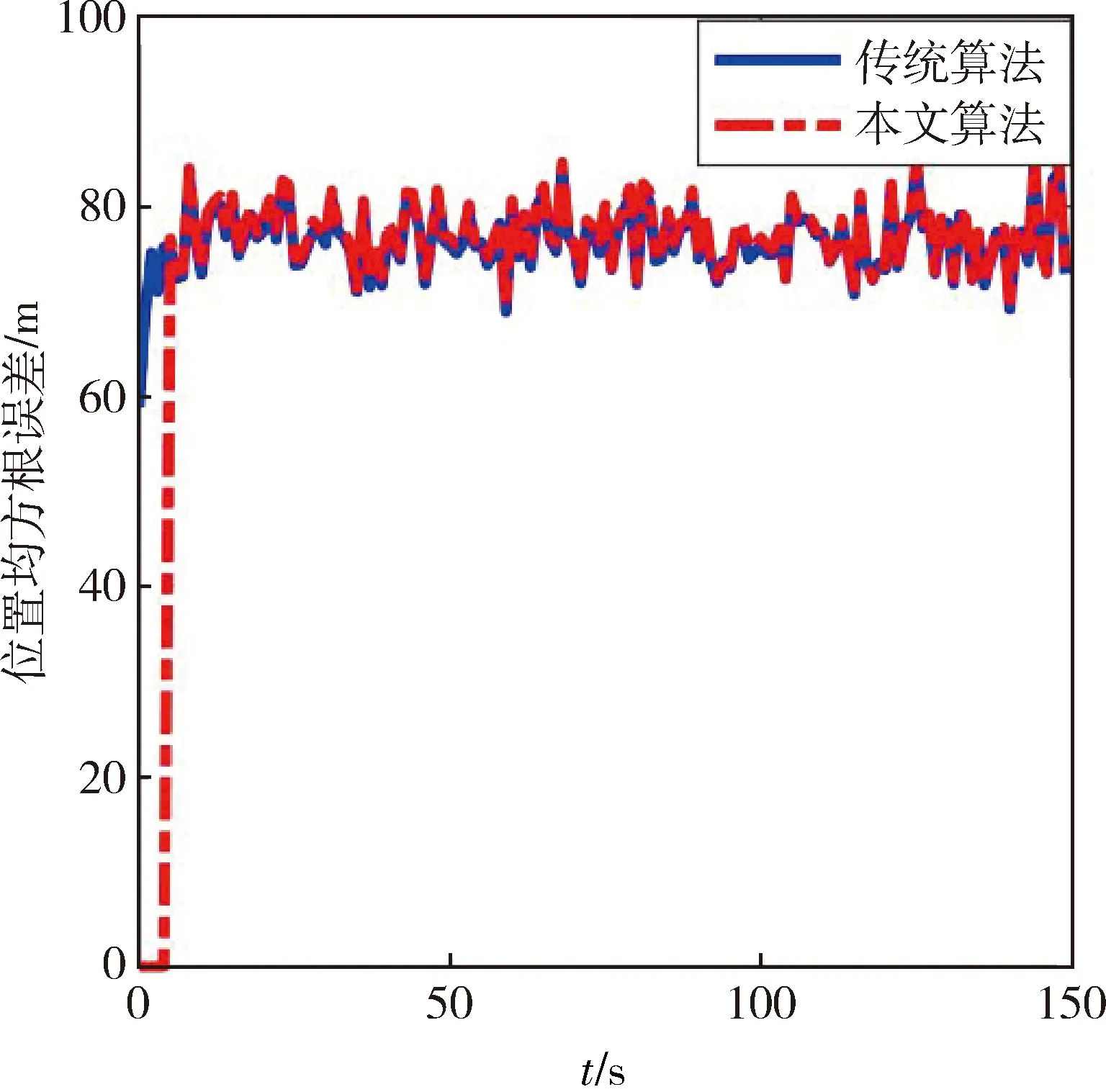
图2 位置均方根误差
由图2可知,在采样频率低、信噪比低的环境下,MAF算法与AF算法跟踪效果相当,其主要原因是当机动频率的计算出现较大波动时,滤波系统对观测量依赖性增强,新息值与状态增益Kk增大,量测补偿值增加,而对状态量一步预测的依赖性减弱,即使状态量预估不准确,也可通过量测进行补偿。
2.2 改进算法收敛性仿真校验
仿真2:高采样频率,改变信噪比
采样周期T=0.2s,位置观测误差为均值为0、方差w分别为10、100的白噪声序列,测试在高采样频率、不同信噪比条件下的算法收敛性,仿真曲线如下:
图3~5为3种滤波方法对位置、速度、加速度的跟踪均方根误差对比曲线。由图3可知,在采样频率变大后,3种算法在位置估计中都不会出现较大偏差。100 s之前为匀速圆周运动、100 s之后为匀加速直线运动。第100 s时发生了机动频率变化,由于AF算法预设的机动频率与实际运动情况不符,100 s之后AF算法的速度与加速度估计偏差明显增大,而两种自适应算法通过实时调整机动频率,都可以保持较好的跟踪精度。在100次高信噪比蒙特卡洛仿真中,3种算法的收敛速度相当,两种改进算法都能够较AF算法提升一定的跟踪精度。由图4~5可知,MAF算法与文献[10]算法在100s时都出现了不同程度的波动,这是由于目标的机动频率的改变,两种自适应算法需要对机动频率与加速度方差进行重新计算。在3种算法中,MAF最精准且收敛速度快。由图6可知,MAF算法计算出的机动频率可以更真实地反映目标的机动情况;AF算法由于保持机动频率不更新,出现误差偏离;而文献[10]算法对于机动频率的计算过于依赖量测值,导致机动频率值不稳定。在高信噪比环境下,MAF算法的位置跟踪精度较AF提高20%,速度与加速度跟踪精度提高1~4倍。

图3 位置均方根误差(w=10)

图4 速度均方根误差(w=10)

图5 加速度均方根误差(w=10)

图6 机动频率值
由图7可知,信噪比降低后,AF算法与文献[10]算法都会产生一定程度的位置跟踪误差,只有MAF算法保持了最高的跟踪精度。由图8及9可知,在只修正位置观测量的情况下,MAF算法的速度与加速度跟踪误差最小,而AF算法基本无法跟踪目标加速度,表明MAF计算的机动频率可以更好地反映目标运动情况,滤波系统状态预测更加可靠。在低信噪比环境下,MAF算法的位置精度可达AF算法的2倍,在AF算法无法跟踪速度与加速度的情况下得到了较好的跟踪结果。

图7 位置均方根误差值(w=100)

图8 速度均方根误差(w=100)
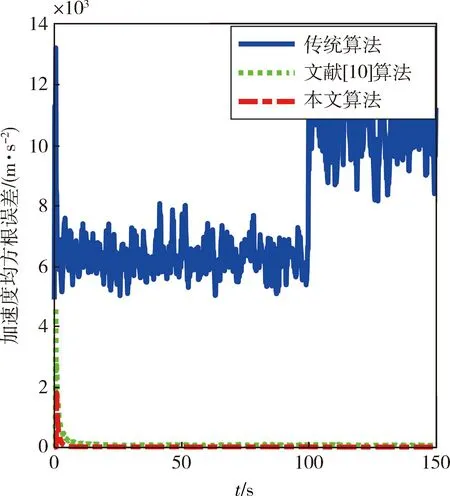
图9 加速度均方根误差(w=100)
3 结论
针对“当前”统计模型预设参数与运动状态不匹配问题,提出一种MAF算法,分析并利用机动频率与加速度之间关系,实现跟踪过程中机动频率与加速度方差的自适应调整,实时保证参数与运动状态相匹配,提高跟踪精度。仿真分析表明,采样频率或信噪比的变化对MAF算法无本质影响,仍可保持较高稳定性和跟踪精度。在高信噪比环境下,MAF算法的位置精度较AF算法提升20%;低信噪比环境下,MAF算法的位置精度较AF算法提高2倍。
