预警机与无人机对海协同探测仿真系统设计与实现
2022-09-09张玉营
张玉营
(中国电子科技集团公司第三十八研究所 安徽省合肥市 230031)
海洋是地球生命的摇篮,是人类繁衍生息和持续发展的重要空间。海域安全不仅直接影响我国海洋资源的使用和开发,而且关系着国家主权与领土完整,因此对海探测技术对国防安全具有重要的意义。
随着无人机研制技术的持续发展,无人机的性能不断提高、功能日渐完善,同时还具有成本较低、不惧伤亡、机动灵活、续航能力强、隐蔽性好等特点,因此无人机俨然成为对海探测的主力军。但是无人机受智能化水平以及探测能力所限,难以高效自主完成大规模的探测任务,所以发挥预警机和无人机各自优势,形成预警/无人机混合编队协同探测不失为一种两全其美的探测手段。预警/无人机协同探测具有侦察性能及效率高、生存能力强、空间覆盖率高等优势。目前对各种多传感器协同探测设计的算法研究得比较多,如信息融合技术的研究,但对各种算法的工程实现的可行性分析的研究相对较少,仅有的研究也多针对同一类型多载荷协同。
本文以预警机/无人机协同对海探测为背景,基于电子信号和SAR 图像两种不同类型的载荷数据研究协同探测工作流程,设计协同探测仿真系统,并针对多组实验数据进行效果展示,为预警机与无人机的协同探测研究提供工程化平台。
1 工作流程
预警/无人机混合编队一般是由1 架预警机作为指挥机以及数架无人机作为侦察机在通信网络支持下,完成协同探测任务。但编队的工作流程直接影响整个编队的探测效果及效率。本文基于预警机和SAR 无人机的对海探测特点和优势,设计了更高效、更能发挥两者优势的工作流程。
1.1 对海探测特点
对海探测时,主要侦察对象为海面舰船目标,目标特性不仅表现为空间特征(位置、速度等)、统计特征(均方差等),还表现为结构特征(目标尺寸、大小等),探测背景相对陆地较为单一,但是同样面临诸多问题。
(1)目标种类多,有民用船只、军用舰船等各种运动/静止目标,其中军用舰船就分为驱逐舰、护卫舰、导弹艇、航空母舰等多种类型。
(2)目标特性迥异,动态范围大,高/低速目标,大/小型目标,机动/非机动目标混杂,如对于目标散射强度,大型舰船、货轮、航母等回波强度(雷达散射截面积RCS约为3000m),要比潜望镜、通气管等目标信号(RCS 约为1~10m)强35 dB 左右。
(3)复杂的背景杂波环境,主要表现为不同海情下,浪、涌等的运动,海杂波为动态杂波,不仅回波强度与雷达工作频率、极化方式、海况、风向等物理因素相关,且回波特征复杂,表现出很强的非高斯性、复杂的时域相关性和多普勒特性;同时,来自濒海陆地(岛屿)的地杂波与海杂波特性差异极大,海面目标特性表现不明。
(4)目标分布具有广域、海量与特定区域密集的特点。
(5)不同于空中目标,具有慢动性和聚集性的特点。
探测时,预警机搭载预警机雷达,可输出目标的点迹和航迹数据,提供目标的位置、时间、航向、航速等信息,实现海杂波背景下舰船目标的发现、定位和跟踪,具有低空/超低空探测性能优越、机动能力强、探测空域范围大等优点,但定位精度和分辨率都比较低,只能起到宏观监视的效果,难以形成有效的态势情报信息。对海探测时,预警机作为探测编队的眼睛和大脑,起到统领全局的决定作用。
SAR 无人机搭载合成孔径雷达,可获得感兴趣区域/目标的ISAR 图像,提供目标的位置、长宽、外形包络、散射特性等信息,且具有全天时、全天候、定位精度高等优点,但探测范围较小。对海探测时,无人机作为探测编队的具体执行者,起到见微知著的作用。
1.2 具体流程
首先由预警机进行海域探测,获取海面目标的航迹信息,然后针对感兴趣的疑似目标,向无人机发起“详查”需求。无人机收到预警机的需求信息,进行任务规划,明确飞行航线与成像区域后,飞往待探测目标,并向雷达发送具体工作指令,完成高精度SAR 成像,传回预警机。为了方便数据显示以及协同处理,这里设计了协同侦察软件,部署在预警机上,用于接收预警机的飞机位置、电子信号信息,及无人机的飞机位置信息及图像信息并对其进行显示、对SAR 图像进行舰船目标检测识别分类,与预警机目标进行目标关联、信息融合,最终形成态势情报。具体工作流程如图1所示。

图1:工作流程
2 仿真系统设计和实现
根据工作流程设计,预警机与无人机协同探测仿真系统应包括3 个主要部分,分别是预警机模型、无人机(雷达)模型和协同验证软件。
2.1 预警机模型
预警机模型基于Microsoft Visual Studio 2013 进行开发,主要分为数据生成模块及数据发送模块。其中数据生成模块功能为生成航迹信息,根据文献实现;数据发送模块功能为向协同验证软件发送预警机位置以及航迹信息,其软件流程如图2所示。
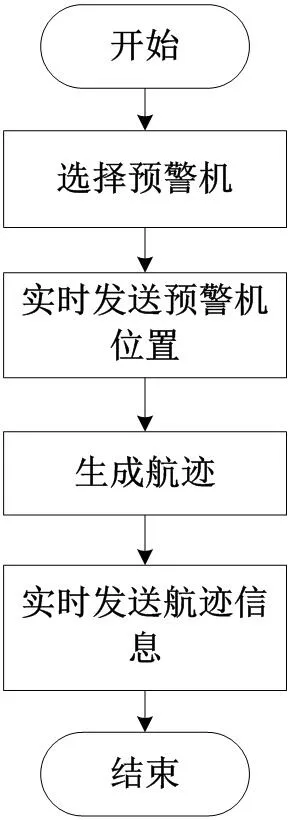
图2:预警机模型工作流程
2.2 无人机(雷达)模型
无人机(雷达)模型基于Microsoft Visual Studio 2013进行开发,其主要功能为从协同验证软件接收接收飞行指令和工作指令,以及向协同验证软件发送无人机位置及SAR图像,其软件流程如图3所示。
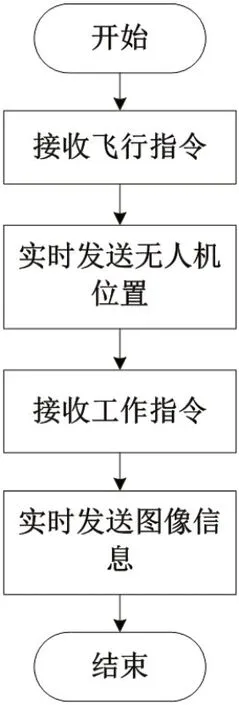
图3:无人机模型工作流程
2.3 协同验证软件
协同验证软件作为仿真系统的核心模块,由显示模块、通信模块、目标检测识别模块以及信息融合模块组成,完成系统的主要信息接收显示及处理功能,其界面基于QT5.7.0开发,后端服务基于Microsoft Visual Studio 2013 开发,其软件流程如图4所示。
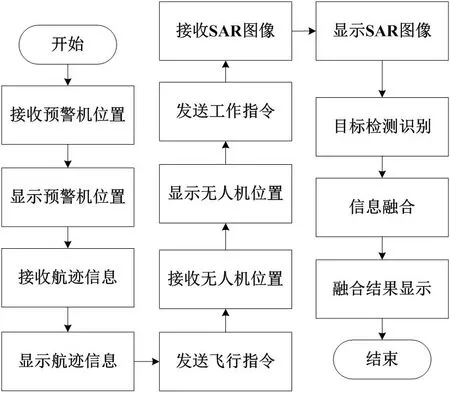
图4:协同验证软件工作流程
2.3.1 显示模块
显示模块主要完成在GIS 架构下显示矢量电子地图和影像地图及支持地图基本操作:如放大、缩小、拖动、鼠标位置、比例尺等;支持SAR 图像/电子信号按照地理坐标实时动态叠加在电子地图上及基本操作:如选择、上下移动、拖动等;支持SAR 图像/航迹列表显示及相应信息的编辑等操作;支持动态接收并显示预警机位置、无人机位置等;支持舰船检测识别结果的矢量显示和属性显示及基础操作,如选择,矢量颜色、大小、形状的设置等。
2.3.2 通信模块
通信模块主要通过UDP 组播完成接收来自预警机的飞机位置、电子信号信息,来自无人机的飞机位置信息及向无人机发送飞行指令以及雷达工作指令;通过TCP 接收来自无人机的SAR 图像数据。
2.3.3 目标检测识别模块
协同探测效果受到预警机和无人机分别获取信息的直接影响,所以无人机高效准确获取目标信息的能力至关重要。而此能力不仅取决于搭载平台和传感器的先进性,而且取决于图像分析、识别、理解等方面的速度和精度。
目标检测识别模块主要基于上千幅SAR 图像切片利用Faster RCNN 进行深度学习网络的训练,然后通过训练获得的模型进行舰船目标的分类识别,其中Faster RCNN 主要包 含Conv layers、Region Proposal Networks、ROI Pooling和Classification 这4 部分内容。Conv layers 利用基础的conv+relu+pooling 组合模型提取图片特征;然后将图片特征输入Region Proposal Networks 生成proposals;图片特征和proposals 输入ROI Pooling 得到侯选区域特征;最后根据侯选区域特征进行边框回归和目标分类。最后的检测结果在地图上以红色框在图像中框出来,具体的目标信息在目标信息表中列出,如经纬度、长宽、类型、置信度等。
2.3.4 信息融合模块
目标信息融合是预警/无人机协同探测的根本基础,融合效果直接决定探测性能,融合信息准确可以发挥1+1>2 的探测效果;反之,则导致1+1<1 的事倍功半的结果。尤其随着预警/无人机探测能力的不断提高,系统获取的数据量更大、数据类型更复杂、干扰更多,准确实现目标信息融合更具挑战性。
无人机载SAR 图像目标信息一般包括目标的时间、位置、目标类别、目标形状信息、目标切片等直观具体的信息;预警机目标信息一般包括目标的时间、位置、速度(大小及方向)等较为抽象的信息。
信息融合模块基于两者的探测结果特点,利用多层决策的目标信息融合技术将SAR 图像目标识别结果与预警机目标航迹信息进行融合,生成融合目标信息。基于多层决策的目标信息融合技术包括基于时间属性的数据关联、基于空间属性的目标关联、基于属性特征的目标精匹配以及目标信息融合等步骤。基于时间属性的数据关联是按数据生成时间将无人机数据跟预警机数据进行关联;基于空间属性的目标关联是基于已经关联的无人机和预警机数据,根据目标位置信息、航向、航速进行目标关联;基于属性特征的目标精匹配是利用两者的属性信息,对已经关联的目标进行确认和对关联匹配错误的目标进行虚警去除,以获得更精确的目标匹配结果。分层多级决策,一方面可以减少数据计算量,另一方面又可以确保目标关联的精度。
融合成功的目标的航迹信息会以颜色区分,具体的融合目标信息以列表形式显示。而且图像和航迹信息进行关联显示,即查看航迹信息时,可以以切片的形式获得目标的图像信息;查看SAR 图像时,可以获得目标的速度、航向以及运动趋势等信息。
3 仿真系统实现
3.1 预警机模型
预警机模型的软件界面如图5所示。其中,“网络设置”通过手动设置保证3 个模块间通信顺畅。“选择”按钮用于选择不同的预警机,向协同探测软件发送不同的位置信息。“发送点航迹”按钮向协同探测软件发送不同的点航迹信息。
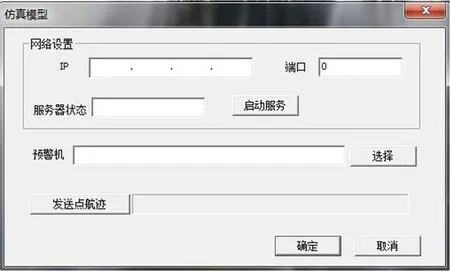
图5:预警机模型界面
3.2 无人机(雷达)模型
无人机(雷达)模型为被动接受指令后,根据指令信息自动向协同验证软件发送相应位置及图像数据,因此无界面作为后端服务运行。
3.3 协同验证软件
3.3.1 显示模块
显示模块主要用于SAR 图像数据、航迹数据及目标数据叠加在电子地图底图上的显示,具体软件界面如图6所示。

图6:数据显示
3.3.2 通信模块
通信模块基于UDP 及TCP 完成数据的传输和交换,其接收的数据会通过显示模块显示在软件界面中,如图6所示。
3.3.2 目标检测识别及信息融合模块
目标检测识别及信息融合模块的具体界面如图7所示,其中绿色的为与检测识别后的SAR 图像目标融合后的预警机目标信息,红色的为待融合或者未融合的预警机目标信息。

图7:信息融合结果
4 结束语
本文设计了一种支撑预警机与无人机协同探测的仿真系统。在仿真系统设计过程中,探讨了预警机与无人机协同探测的工作流程,并基于QT5.7.0 和Microsoft Visual Studio 2013 开发协同探测软件进行试验验证,得到了较好的效果。
