基于机器视觉的航天装备元器件瑕疵检测系统研究
2022-09-09张魏魏
张魏魏
(上海航天控制技术研究所 上海市 201109)
1 航天装备元器件瑕疵检测相关方法
元器件是航天装备科研生产中重要的组成部分,其质量的好坏关系着航天装备的生产成功与否,所以有必要检测元器件中是否有瑕疵存在。航天装备的元器件瑕疵通常是外观表现出的瑕疵,如图1所示,含瑕疵的产品与合格产品的外观情况有差异,而外在瑕疵能够被肉眼可见,因此国内部分航天制造企业采用较为传统的人眼检测的方法检测生产航天装备的元器件,这种检测方法根据质量检测工人的积累出来的经验来判断元器件表面是否有质量问题,并将该质量问题手动记录下来。质检工人需要经过实践培训和理论知识的学习培训,经过一定时间的培训且合格后才可上岗完成对元器件的外观质量检测,但是这种人工检测的方法具有一定的局限性。一方面,产品质检结果的好坏较大程度取决于质检工人的经验积累和理论学习的程度,在检测任务量较大时,则需要工人熟练的操作,同时需要在不产生疲劳问题的情况下进行操作,这些限制都将影响检测结果的正确性,不利于制造厂商对元器件的质量管控。
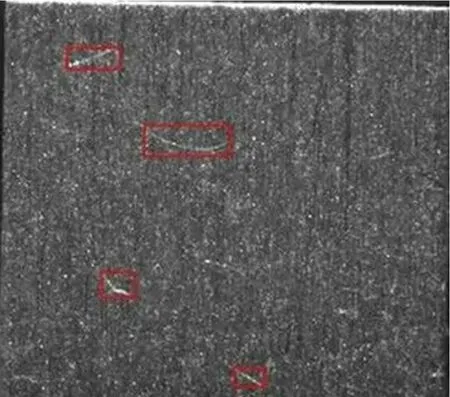
图1:元器件外观划痕
现在市面上已针对不同的应用场景开发出产品瑕疵检测装置,例如超声检测装置,这种检测方法对检测对象本身不会造成损伤,属于无损检测法。该种方法的检测原理是将压电转换器射出的超声波,借助辅助显示剂的作用射入被测对象中,检测工作人员通过观察被测件反射或投射的波形来判断瑕疵的位置和类型。当超声波遇到正常工件和存在瑕疵的工件时,会反射回来不同的波的信息,检测人员可以根据波的情况判断工件瑕疵信息。但是这种无损检测装置适用范围小,且费用较高,对国内的部分成本管控较为严格的企业来说,并不是一种较好选择。
由于以上检测方法的种种局限性,基于机器视觉技术在工业检测中取得了快速发展,这种方法以机器代替人眼,同时也能满足不同场景的检测需求。机器视觉技术的是利用机器模拟人类视觉系统以识别对象的方法,该技术需要借助多个领域的相关方法,其中有计算机软件信息处理、图像信息处理以及模式识别等这几个方面。通常在实际应用中利用机器视觉系统解决对象识别的问题,主要有两部分内容:硬件设备和软件部分。硬件设备包含照明设备、图像采集设备、工业计算机控制部分、运动控制设备等部分,软件部分需要借助图像处理方法和图像识别部分。机器视觉技术利用图像采集系统对待检测图像进行图像采集,并将图像传输到软件,之后运用图像处理软件高效地获取到客观事物真实有效的信息,最后在计算机软件交互界面显示结果。本文基于机器视觉技术设计了一种航天装备元器件瑕疵检测系统。
2 检测系统硬件设计
基于机器视觉技术的航天装备元器件瑕疵检测以采集到的元器件外观图像为检测对象,系统中硬件设备采集到的图像的清晰程度将直接影响瑕疵检测结果。在检测过程中需要建立一个良好的照明环境,排除外界对照明的影响,进而提高所采集到图像的质量。从硬件设备中采集到的航天装备元器件高清晰度的原始图像能简化图像处理进而提高元器件瑕疵检测的效率和准确性,为此需要搭建一个良好的硬件平台。航天装备元器件的瑕疵检测系统硬件设备方案包含照明环境环境、图像采集部分、工控设备、运动控制设备和计算机等。
为采集到高质量的图像,需要借助良好的光源设备,在多种光源中,球形光源性能较好,如图2所示,其所产生的光纤较为扩散,可有效降低对焦照射的阴影影响,其相对点状、条形和背光源等类型的光源设备会产生较为均匀的光线。若不同种类的元器件形状不一,但光源在元器件各部分的反射也是均匀的。

图2:球形光源设备
图像采集部分的核心部件是图像传感器和图像采集控制板。图像传感器工业应用中常见打为CMOS 传感器和CCD传感器,而CCD传感器简单高效且成本较低,适合工业检测;图像采集卡可高效地处理大批量地图像数据,如图3所示,为用户使用时提供方便。

图3:图像采集卡
运动控制设备中地机械和电气部分同时工作,将待检测地元器件放置于图像采集模块中。计算机时硬件设备地核心部分,图像处理和控制相关命令都在计算机中进行,因此需要高性能地计算机才可适应生产需要。本文搭建的硬件设备组成如图4所示。
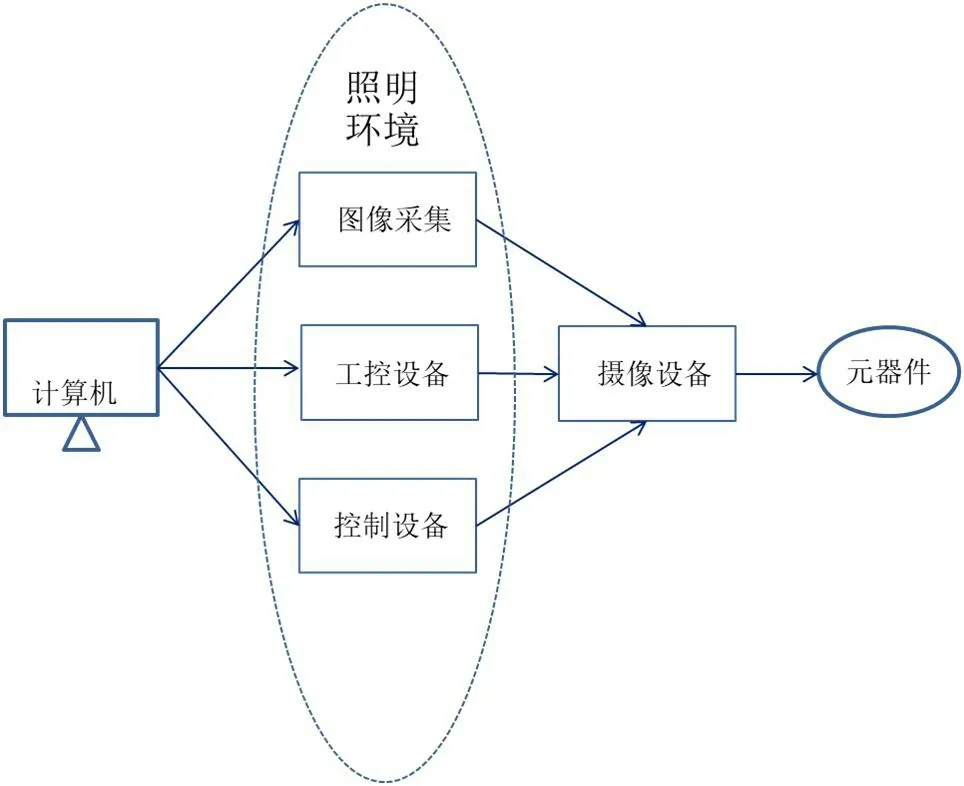
图4:硬件设备组成
3 检测系统软件
3.1 航天装备元器件检测图像预处理
当硬件设备采集到所需元器件图像后,由于图像为彩色图像,单张图像的数据量较大,采集的图像数量较多时,将会大大增加计算机的计算时间,提高时间成本,所以需要对图像进行预处理,将其转化为数据量小的灰度化图像。受光照环境的影响,难免会因为非均匀的光源,在图像种产生明暗分布不均的情况,进而造成元器件瑕疵点受光照干扰的问题,所以需运用图像增强方法将瑕疵点区域凸现出来,以便后续元器件图像的检测。
文中采用Gamma增强方法对元器件图像进行增强处理。其原理是将Gmma 曲线应用到待检测图像中的像素,低灰度的像素值和高灰度的像素值间进行比例调整,以将整体图像中的像素显示效果提高。Gamma 校正的变换函数可用下式表示:


伽马校正属于全局性增强方法,针对不一样的灰度级图像会使得利用伽马函数既会增强较暗区域的灰度值,提高亮区的灰度值,也会减弱较亮区灰度值,降低暗区的灰度值。本文采用改进的伽马校正算法,采用累计PDF 函数以在考虑图像全局信息的同时,针对不同灰度值的像素使用对应的变化曲线。首先在灰度值的PDF 中引用加权函数对其进行修正。修正后的函数能够抑制PDF 高的值过度增强,并且可以使PDF 低的值平滑增强。
3.2 航天装备元器件检测图像滤波
航天装备元器件外观图像在形成和数据传输的过程中会有噪声的产生,图像中的噪声通常呈现为随机、离散和多样性的特征,将在一定程度上降低元器件外观图像的清晰度,该问题会对图像后续地瑕疵分割造成干扰。常见的有乘性噪声、加性噪声和均匀分布噪声。
乘性噪声是由于存在缺陷的信道产生,该噪声与信号的关系呈现相乘关系,因此档信号存在时才会产生乘性噪声,可由下式表示:

其中其中,x(i,j)是理想的图像,n(i,j)是噪声图像,g(i,j)是含噪声的实际输出图像。
加性噪声是与信号相加关系的一种噪声,即使信号不存在,也会产生噪声,通常该种噪声被视为背景噪声,可由下式表示:

均匀分布噪声产生较为简单,其概率密度函数可由下式表示:

其中,z 表示像素的灰度值,m 和n 表示给定的像素最小灰度值与像素最大灰度值,均匀分布噪声分布函数中的均值和方差分别表示如下:

若对图像的中的噪声降低效果不佳的话,元器件瑕疵检测系统可能会将噪声点误判断为目标点,影响瑕疵的检出率,因此需采用具有良好滤波效果的方法滤除噪声。图像滤波通常分为两种,一种是对图像的频率特征进行分解、处理和分析的频率域滤波,该方法需进行大量计算,增加了运行时间成本;另一种是直接在图像像素上进行操作的空间域滤波,算法简单高效。在实际工程应用中,通常需要简单高效的滤波方法。文中采用一种空域滤波方法:双边滤波法。该方法与常用的高斯滤波方法较为相似,使用加权平均的计算方法,使得该滤波方法兼顾了空间临近像素和像素相似程度,并且对待滤波图像能够最大程度保护边缘像素不被模糊掉。双边滤波方法可用下式表示:


3.3 航天装备元器件检测图像分割
当对待检测图像噪声处理后,图像由于去除了干扰像素,其清晰度得到改善,但仍未检测出航天装备元器件外观上的瑕疵,需要进一步通过图像分割,将瑕疵点突出。由于光源技术的限制,文中采用的光源设备并不能产生完美的光照,在图像上一处仍会产生高光区域,而在图像中心未知的像素值较大,整体上呈现较亮的效果。在有瑕疵点存在的图像中,将瑕疵部分称作待检测目标,而将其他部分的像素区视为背景。对待检测图像采取阈值分割的处理方法,将会得到只含背景和待检目标两个区域的图像,即二值化图像,待检瑕疵区从背景中凸显出来。
在众多图像目标分割方法中,全局分割方法受光线影响较大,若硬件设备不能提供完美的均匀性光线,其图像中目标分割的效果不理想。Niblack 方法分割不均匀光照的图像时,自适应性较差,与全局阈值分割方法一样会造成严重的错误分割,并且其分割结果中含有较多的噪声。因此本文采用一种自适应阈值分割法。
该阈值分割方法是一种基于局部阈值分割算法,其分割目标的原理是以待检测图像的某个像素为中心,将中心像素与其周围邻域的像素组成一个部分,计算该部分内像素值的最大最小灰度级别,然后计算它们之间的平均值,并将该数值作为阈值,如图5所示。当选择的窗口越大,所需处理的数据量就越大,从而提高了该局部阈值分割法的分割时间。因此,将当前像素周围的8 个像素作为邻域窗口。设C 为图像当前的各像素点,N为当前像素点C 的8 邻域像素,l和l分别表示邻域内像素点中的最小灰度级数和最大灰度级数,可得到阈值:
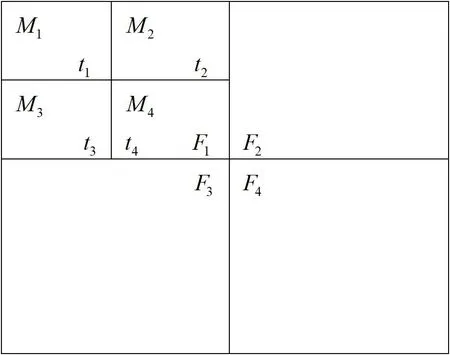
图5:自适应阈值分割划分原理

本文采用的自适应阈值分割算法将待检测图像分成数个子图像,并将其表示为(F,F,…,F)。每个子图像按其分布特征进一步划分成数个邻域,表示为(M,M,…,M),可以得到具有一定特性且所划分邻域接近无穷小,最后对分割图像会产生多个阈值,表示为(t,t,…,t),如图5所示。在划分区域数量较多时,则每个阈值可以近似为当前像素点得灰度值。
当对待检测图像进行分割过程之后,在分割图像仍会有一些细小颗粒,图像分割方法的这些自身局限性都将导致不理想的显示结果,最终影响瑕疵区域的有效提取,因此有必要采用数学形态学操作在图像分割后图像进行处理。
4 元器件瑕疵检测实验
在搭建好硬件设备环境后,运用计算机图像处理软件进行元器件瑕疵检测实验。航天装备元器件瑕疵检测流程如图6所示。

图6:航天装备元器件瑕疵检测流程
文中元器件瑕疵检测实验采集了300 张用于生产某单机产品的元器件外观图像,对其外观图像进行检测。经质检人员对该300 个元器件检验,外观合格的元器件为281 个,外观图像中检出瑕疵的不合格元器件为19 个。针对281 个检测为合格的元器件图像中,误检出2 个含瑕疵元器件;对于19 个检测为不合格元器件的图像中,18 个检测样本实验正确,而仅有1 个样本未能将含瑕疵的不合格元器件检测出来。
为客观评价文中的航天装备元器件瑕疵检测方法,采用以下几个参数对实验中的方法进行评价:
根据实验中检测的结果并结合以上4 个参数,可得出文中检测方法的瑕疵正确检出率为94.7%,误检率为0.7%,漏检率为5.2%,单个元器件检测用时为0.8 秒,实现了高效且快速的检测。
5 结论
文章以机器视觉技术为基础,选择较为均匀的光源设备、高效采集和处理图像数据的设备以及性能良好的运动控制涉笔和计算机,以此搭建高质量的硬件设备环境,采集航天装备元器件图像进行检测。首先运用Gamma 图像增强方法、双边滤波法和自适应阈值分割对图像进行处理,然后检测元器件外观瑕疵,最后设置3 个评价参数对文中的瑕疵检测方法进行评价。相对人工检测的方法,本文基于机器视觉的瑕疵检测方法具有准确性高、检测快速、降低人力成本的优点,符合当下高质量、高效率、高效益发展的航天装备生产制造模式。
