开放式综合通信导航识别系统重构设计
2022-09-09唐明
唐明
(中国电子科技集团公司第十研究所 四川省成都市 610036)
1 引言
航空电子系统是飞行器中的任务传感器系统、多功能电子系统、总线传输系统和计算处理系统的总称,随着航空电子系统的发展,基于开放式体系架构的模块化、综合化系统设计已经成为航空电子系统的发展趋势。作为模块化综合系统的关键技术之一,系统备份充分利用模块化的设计优势,将系统关键节点及重要硬件资源进行冗余备份,通过系统软件的实时调度实现重要功能的余度设计。系统重构则是在硬件资源冗余备份设计的基础上,以基于模块的故障检测与诊断技术为前提,通过完善的系统控制管理逻辑来实现资源的高度共享和任务可靠性的提升。
2 开放式综合CNI系统
2.1 开放式系统特征
20世纪90年代中后期,以美国“宝石台(Pave Pace)”计划和“联合先进攻击战斗机(JSF)”计划为代表,提出了开放式航空电子体系结构,该体系结构的核心是通过对系统接口、功能采用广泛使用的非专利性规范,以最小变化适应多种用途的软硬件集合。开放式体系结构目前已成为美国F-35飞机航空电子系统的基础,其强调采用以民用标准为基础的统一传输网络,以软件无线电为基础的模块划分,以及具有高可靠性和高扩展性的机械、电气接口,以便实现当前技术和未来技术间的平稳过渡,达到“降本增效”的目的。综合CNI系统的设计也应遵从此要求开展系统设计。
2.2 模块化系统
航空电子系统由软件逻辑结构和硬件物理结构组成,早期(20世纪70年代前)的航空电子系统由各种专用设备组成,并从分立式、联合式、综合式,发展成为以模块化为基础的开放式系统结构。
模块是指可组合成系统并且具有某种特定功能和接口结构的通用独立单元,而模块化航空电子系统是指通过一系列标准化通用功能模块的组合,通过加载与硬件无关的软件,完成航空电子各个设备功能的系统。在模块化航空电子系统中,各个子系统都是建立在通用功能模块之上的,而通用功能模块在机载硬件资源基础上,通过加载不同的软件完成具体的功能。对于模块化航空电子系统,它的优点就是将一些航空电子设备整合到一个标准的硬件平台上,为了避免这些设备之间的相互影响,必须将它们封装在综合区域之中,这也是组件模块化航电电子系统的基本手段。系统综合化模块化消除了设备物理结构间的界限,实现了多任务之间的软硬件资源共享,从而实现了航空电子系统由设备集成到功能综合的根本性转变。因此,模块化系统结构是综合CNI系统设计的基本要求。
2.3 综合CNI系统设计流程
作为现代飞机航空电子系统的重要组成部分,无线电通信、导航与识别功能具有相近的电波空间传输、检测和处理的特征,将这些系统功能进行综合设计是航空电子系统一个重要的设计方法,称为综合通信导航识别(Integrated Communication Navigation and Identification)系统。传统的CNI系统是基于独立设备的联合式集成系统,采用多路传输数据总线将相关设备互连起来,并进行综合显示和控制。近年来,综合CNI系统逐步演变为基于模块结构的综合系统,其设计思路是:采用开放式的模块化系统结构取代原先各自独立的CNI设备,用软件无线电技术对高速A/D转换信号进行射频信号数字化处理,用高速DSP和FPGA进行基带信号处理,用软件实现各种信号波形的重编程和无线电功能。
综合CNI系统的设计流程如图1所示。根据无线电收发机结构定义和通信导航识别设备的工作原理,在统一的标准下将原有的独立设备分解为不同的功能单元,然后根据实现功能相似的原则对各个功能单元进行组合归类,形成多个通用的功能模块,并在此基础上完成系统总体框图设计。
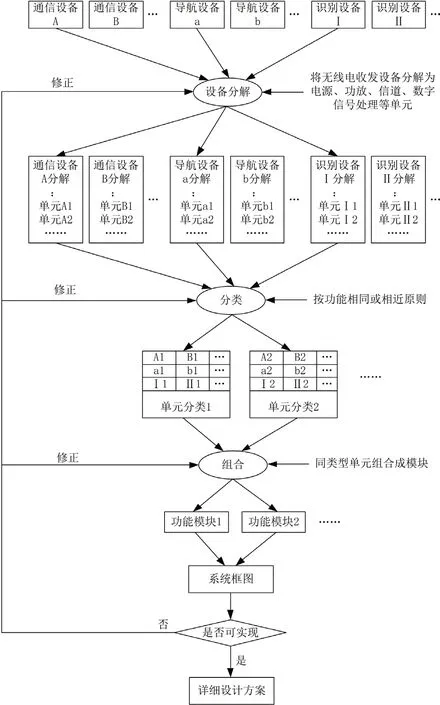
图1:综合CNI系统设计流程
2.4 综合CNI系统典型构型
综合CNI系统按照上述自顶向下的设计流程,将CNI系统统一划分为综合孔径、综合信道、综合数据处理等功能区域。其中,综合孔径区完成射频信号的接收和发射;综合信道区完成射频信号适配、功率放大、射频交换、射频滤波及上下变频、中频滤波及放大、中频信号数字化、中频交换等功能;综合数据区完成数字中频信号处理、数据及协议处理、加/解密处理、语音处理等功能。
综合CNI系统突破了传统的某个传感器设备实现某特定功能的设计思维模式,采用全新的软件无线电技术,将整个CNI系统的各个子功能按照工作频段和处理流程进行资源综合化设计。各处理资源在系统统一的监测、调度、管理下动态组合形成完整的硬件处理链路,并在通用的硬件平台上加载不同的功能算法软件实现某特定的传感器功能。
综合CNI系统与联合式CNI系统相比,体积、重量、功耗可降低30%左右,综合化、通用化、模块化的系统设计使得模块的种类和数量减少约60%,系统全寿命周期成本降低35%以上,采用模块级的外场备品、备件模式,并将传统的三级维护减少到二级。同时,系统提供的容错和重构能力可大幅提升关键功能的任务可靠性。
3 系统重构设计
对于航空电子系统,可靠性和容错性是两个主要的设计目标。在开放式综合CNI系统中,需要每一个重要的通用功能单元都能在故障发生时,通过系统重构来重新恢复发送和接收链路,能够实现对故障单元的备份冗余处理。因此,重构是综合CNI系统的关键技术之一,重构可定义为在某种条件或状态发生时,利用系统通用资源,动态重建系统的局部功能甚至全部功能。
3.1 重构顶层设计
3.1.1 系统分层结构
综合CNI系统是一个硬件资源可配置、软件可加载的有机系统集,系统通过各种独立流程、功能线程来实现其功能。系统的分层模型如图2所示。
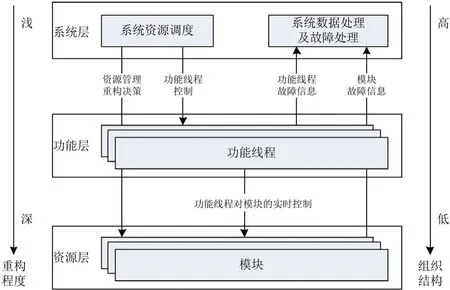
图2:综合CNI系统分层结构模型
系统层负责系统工作全部流程的组织管理,包括对功能线程的状态管理、对模块的状态管理、系统的数据处理和资源分配。功能层是系统中完成一定功能的对象单元集合,由若干功能线程组成,功能线程包含两个基本要素:一个是功能线程的处理软件,另一个是实现功能线程的资源模块集。资源层由系统中的功能模块硬件和底层驱动软件构成,是系统的最小功能单元。
3.1.2 重构要素
根据综合CNI系统典型构型及分层结构模型,系统的重构要素主要包括通用模块、冗余信息交换、通用信号处理和通用数据处理,其逻辑框图如图3所示。
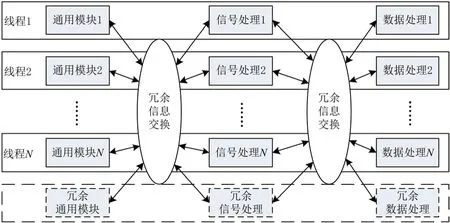
图3:综合CNI系统重构逻辑框图
(1)通用模块:可供多个功能线程射频处理使用的功能模块,模块的功能性能指标经综合化设计后,可满足于一定频段内各个功能线程的使用需求,通过适当的参数配置即可适用于不同的功能。
(2)通用信号处理:可适用于系统中任一功能线程的标准信号处理硬件平台,通过功能应用程序的动态加载实现不同功能的切换。
(3)冗余信息交换:通过冗余信息交换单元实现通用模块、通用信号处理和功能线程之间的信号流重建,信号流包括了射频信号、基带数据及控制信号。
(4)通用数据处理:功能线程输出的数据由统一的数据处理平台进行处理,并实现与航电系统外部设备的数据交互;同时,数据处理也是系统的控制中心,系统重构控制软件部署在该平台,通过建立功能线程优先级分配表、资源模块健康状态表和功能状态表实现系统的重构状态管理。
3.2 重构逻辑设计
3.2.1 功能需求
综合CNI系统主要完成飞机与飞机、飞机与地面之间的话音/数据通信、航路导航、着陆/着舰、敌我识别、航管应答等功能,其典型的功能需求如表1所示。

表1:功能需求表
3.2.2 可重构资源设计
在图2系统分层结构的基础上,综合CNI系统的可重构资源设计主要从以下几个方面开展:
首先对功能线程对象的相关性进行分析,明确哪些功能线程可以采用相同的资源模块构建,哪些功能可以时分复用。根据上表1的功能需求,功能相关性分析的首要考虑因素是工作频段的一致性,由此确定具备功能相关性的功能线程主要包括两个大的功能集,分别为工作于100~400MHz的VHF/UHF频段功能集、工作于0.8GHz~1.5GHz的L频段功能集,包含于这两个功能集内部的功能线程具备相关性和重构的物理基础。同时,从平台的任务使命出发,其执行通信功能4/5/6的任务剖面相互独立,上述三项功能位于同一功能集中,可以时分复用。
其次对模块资源相关性进行分析,对于综合CNI系统,其基础硬件架构包括接收链路和发射链路,接收链路可细分为天线接口单元、下变频单元、中频处理单元等部分;发射链路可细分为中频处理单元、上变频单元、功率放大单元等部分。因此通用模块资源的重构设计集中在各个单元链路开展。在功能线程的信号处理部分,综合考虑各类功能线程波形算法对处理器资源的需求,为各功能线程提供通用的处理平台。
再次对功能线程信号数据流进行分析,找出功能线程重构时,模块对象间信息流的可能重建途径,并结合物理实现代价,确定重构信息流交换的路径及规模。
最后对功能优先级进行分析,在同一功能集中,由于功能线程数量众多,若要实现各功能之间的任意重构,所需的信息流交换规模将十分巨大,在设备体积、重量受限的情况下无法实现。因此,对功能优先级进行分析,通过重构保证当前任务阶段最重要的功能始终能够正常工作,在重构能力和可实现的电路规模之间取得折中,才能达到最优设计。
通过上述可重构资源设计原则,对表1所示的综合CNI系统进行如下重构资源划分:
3.2.2.1 VHF/UHF频段功能集
该功能集中包含通信功能2/3/4/5/6、识别功能1,其中通信功能2具有最高优先级,其链路中任一资源故障都具有重构能力,识别功能1具备最低优先级,不具备重构能力。其余功能可根据优先级设置进行重构。
3.2.2.2 L频段功能集
该功能集中包含通信功能7、导航功能2、识别功能2/3,其中识别功能3具有最高优先级,其链路中任一资源故障都具有重构能力。其余功能可根据优先级设置进行重构。
3.3 重构流程设计
如图3所示,一个典型的综合CNI系统采用通用模块(通用信号处理模块、通用接收模块、通用激励模块、功率放大模块)的共享以及开关矩阵、中频交换的硬件线程路由切换来实现硬件链路的备份,仅需加载不同的功能算法软件即可完成不同的功能,进而实现系统功能的备份与重构。
根据系统重构执行过程,重构可分为任务重构和故障重构。
3.3.1 任务重构
任务重构的触发条件为航电系统下发的任务阶段切换命令,系统控制管理软件接收到该命令后,按照预先设定的功能时分复用逻辑、启动功能重构过程。该过程与故障重构过程的区别在于没有资源选择过程,直接使用分时复用功能的资源。例如,表1中综合CNI系统任务重构仅存在于通信功能4/5/6之间,三项功能占用相同的硬件资源,当飞行员执行某项具体的任务时,系统会根据航电发下的指令将相应资源配置为其中一项通信功能的工作状态。任务重构的流程如图4所示。

图4:任务重构流程
3.3.2 故障重构
故障重构的触发条件为综合CNI系统实时检测通用模块资源状态,发现模块故障后,触发故障处理流程。故障重构的原则如下:
(1)根据不同的飞行阶段对功能的优先级进行定义,重构过程按照优先级由高到低的优先顺序进行;
(2)低优先级功能的丧失不影响高优先级功能,当前最低优先级功能丧失将不启动系统重构过程;
(3)高优先级功能的丧失,用当前最低优先级功能资源进行重构。
根据上述原则,出现模块故障后,系统先判断使用该故障模块功能的优先级,如果是最低,直接报故,不进行故障重构处理;如果使用该模块功能的优先级不是最低、且存在可使用的资源,则解构低优先级的功能,然后把低优先级功能使用的资源分配给报故功能,通过加载功能程序代码、重新下发参数等,使该功能能够正常工作。故障重构的流程如图5所示。
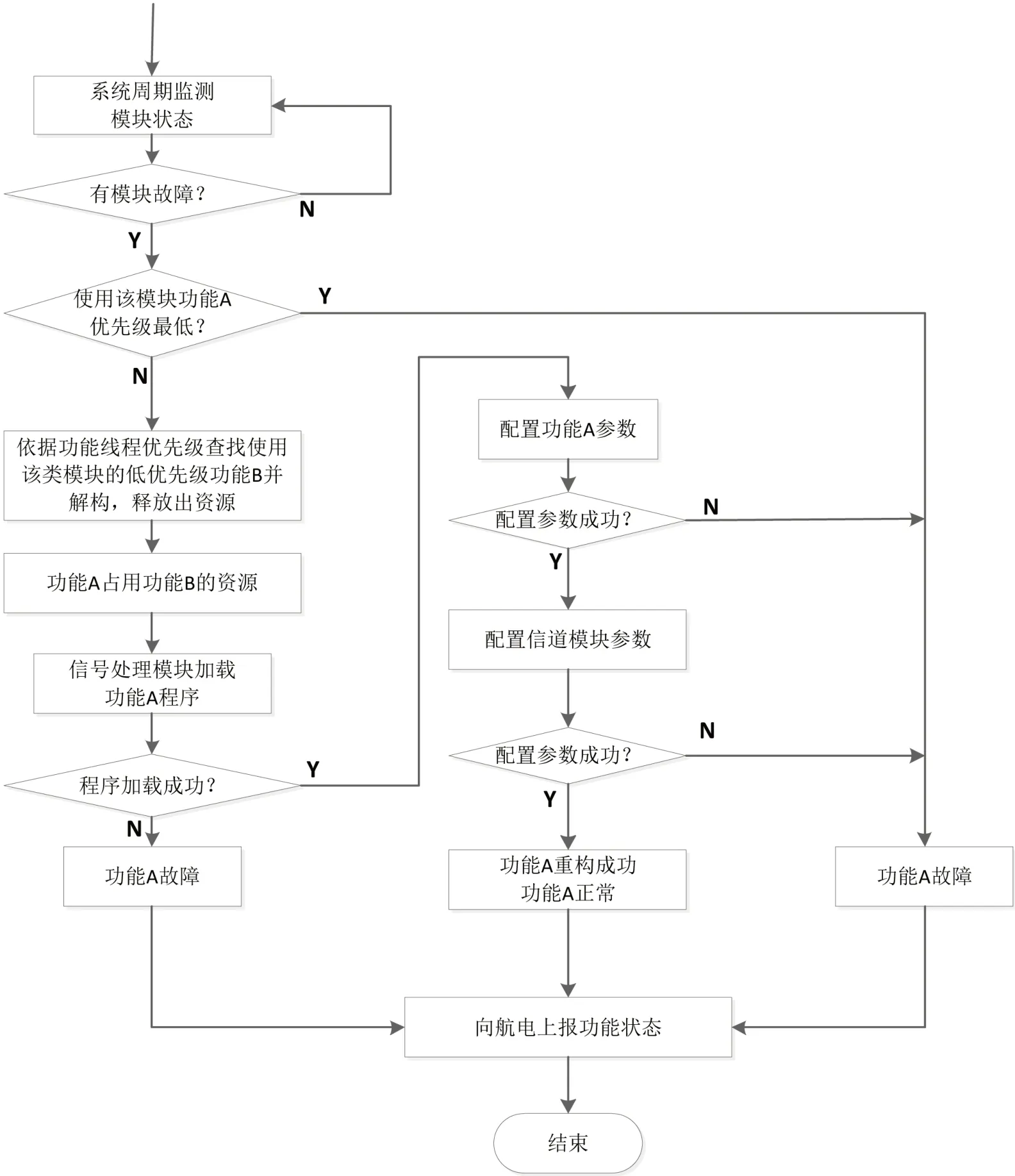
图5:故障重构流程
3.4 重构对系统任务可靠性的影响
综合CNI系统采用了开放式模块化的结构设计,使得各个功能线程能够在时域上进行复用,最终实现了系统通用硬件资源的共享,功能波形、算法的可重构和可扩展,从而提高了CNI系统的可靠性。与联合式CNI系统串行结构相比较,综合CNI系统采用容错能力较强的并行结构设计,假定系统各部件的故障率服从指数分布且相互独立,令第i个部件的寿命为L(i=1,2,…,n),则其可靠度为
R(t)=P{L>t}
若初始时刻为t=0,则串行结构的联合式CNI系统可靠度为:
R(t)=P{min(L,L,…,L)>t},n∈N
并行结构的综合CNI系统可靠度为:
R(t)=P{max(L,L,…,L)>t},n∈N
由此可知联合式CNI系统的可靠性取决于可靠性最低的部件,而采用并行结构设计的综合CNI系统可靠性取决于可靠性最高的部件,因此,通过系统重构可使综合CNI系统的任务可靠性得到显著提高。
4 结论
本文对机载开放式综合CNI系统的特征及设计方法进行探究,结合典型综合CNI系统的构型开展系统重构设计,提取系统重构要素和可重构资源,并对任务重构和故障重构开展了详细的流程设计,可为其它类型综合化模块化系统的重构设计提供参考。
