氮氧化物气体传感器氧气干扰的补偿方法*
2022-09-08钱显威李雪宾周明军宋长营简家文
钱显威, 李雪宾, 周明军, 宋长营, 简家文, 邹 杰
(1.宁波大学 信息科学与工程学院,浙江 宁波 315211;2.中国电子科技集团公司第四十九研究所,黑龙江 哈尔滨 150028;3.浙江科瑞信电子科技有限公司,浙江 湖州 313000)
0 引 言
随着社会经济快速发展,汽车尾气、工业废气、垃圾焚烧等燃烧产生的污染气体给人类生存环境带来了严峻的挑战。其中,氮氧化物气体(NOx,包括NO和NO2)是危害最大且最难处理的污染物之一[1~3]。研究表明,人类在NOx体积分数为5×10-6的空气中暴露10 min,即可造成呼吸系统失调[4]。为了减少NOx排放,使用选择性催化还原(selective catalytic reduction,SCR)对燃烧尾气进行实时脱硝,是目前普遍采用的方式。其中使用基于钇稳定氧化锆制备的双腔式NOx传感器搭配专用控制单元对高温尾气中的NOx进行实时监测,是SCR实现精准脱硝的必要前提。但目前NOx传感器及控制单元的国际和国内市场均被日本NGK公司、德国大陆集团等国际巨头所垄断。
国内对SCR技术有着巨大的需求,为了进一步提高NOx传感器的测量精度和环境适应性,相关企业、高校、科研院所等在陶瓷芯片设计、制备与封装、传感器测试、专用控制器研发等方面做出了巨大努力与贡献。但是,目前在使用中发现,国产NOx传感器敏感探头及其搭配的控制单元输出的NOx体积分数测量值易受尾气中氧气(O2)体积分数波动的影响。虽然在NOx传感器工作原理和物理结构上已经考虑了O2体积分数波动带来的干扰[5~7],但在实际检测NOx过程中发现,仅依靠NOx传感器的双腔式物理结构依然无法完全排除O2体积分数波动带来的干扰[8,9]。
本文结合NOx传感器敏感探头内部结构、工作原理,基于开放式NOx传感器控制单元,研究了O2对NOx体积分数测量的影响规律,提出了一种适用于自主制备NOx传感器敏感探头O2干扰的补偿方法,减小了外界O2体积分数变化对NOx体积分数测量的影响。
1 NOx传感器工作原理
经典的NOx传感器敏感探头核心结构和外部连线如图1所示,各个电极、空腔以及ZrO2固体电解质分别形成主泵、辅助泵和测量泵结构[9~13]。NOx传感器的控制单元对三个泵进行控制,分解尾气中NOx气体,并获取氧离子(O2-)迁移电流,从而实现对NOx体积分数的测量[8,12]。

图1 NOx传感器的结构和外部连线
NOx传感器工作时,加热器将敏感探头温度快速稳定在780 ℃附近。尾气首先扩散至第一空腔,并在主泵电压VP0作用下使绝大部分O2被泵出腔外,产生主泵电流IP0。随后,剩余10-6级体积分数的O2及其他成分扩散至第二空腔,在辅助泵电压VP1作用下进一步被泵出,产生辅助泵电流IP1。最终,尾气中的NO、NO2在添加了特殊催化剂的测量泵电极作用下分解为N2和O2-,O2-在测量泵电压VP2作用下被泵出,产生测量泵电流IP2,IP2即表征了污染物中NOx的体积分数[14]。由此可见,NOx体积分数仅由NOx分解产生的O2-电流换算获得。因此,若测量泵附近还有未被泵出的少量O2就会对NOx的测量产生严重干扰。
通过上述原理可知,为实现NOx体积分数的测量,必须采用合理的多泵联动控制。V0、V1和V2分别为主泵电极、辅助泵电极、测量泵电极与参比电极之间的能斯特电压,通过对这些参数的测量及设定成为控制策略之一[15]。目前常用的IP1定值反馈控制策略是对V0、V1定值反馈控制策略的改进,具有良好控制效果[16,17]。本文采用的是由浙江科瑞信电子科技有限公司为本课题组开发的基于IP1定值反馈控制策略的开放式专用NOx传感器控制单元。
2 实 验
传感器通过自主设计并对外代工制备,测试系统如图2所示。具体操作步骤如下:通过多个数字质量流量控制器(mass flow controller,MFC)中产生x%氧气(O2)+y×10-6一氧化氮(NO)+余氮气(N2)的模拟气氛通入测试腔,其中,x=0,1,3,5,8,13,21,y=0,50,100,200,400,500,1 000,2 000,气体总流量0.2L/min。NOx传感器安装在测试腔内,与控制单元连接,并通过CAN总线将采集到的数据报送至上位机中。上位机软件可对传感器相关参数进行设置:工作温度为780 ℃;辅助泵电流IP1为7 μA;能斯特电压值V1和V2为425 mV和435 mV。同时也可以读取IP0、IP1、IP2和VP0、VP1、VP2的实时数值。模拟气氛会经过测试腔被NOx传感器感知,然后经过洗气瓶的处理实现NOx的无害排放。
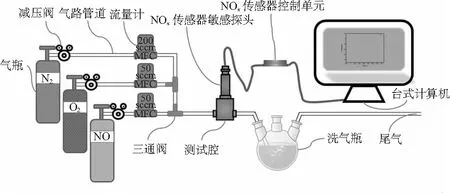
图2 测试系统示意
3 结果分析与补偿方法
3.1 主泵泵电压、泵电流分析
在不同体积分数O2下,VP0和IP0随着NO体积分数变化的趋势分别如图3、图4所示。
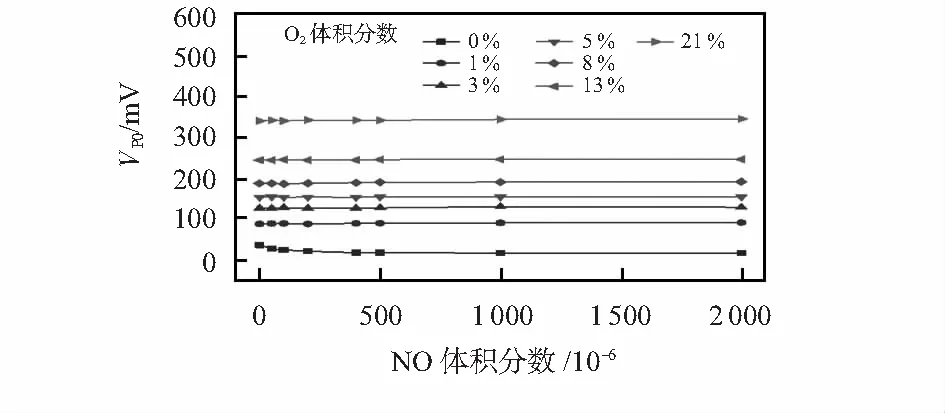
图3 不同O2体积分数下VP0随NO体积分数值变化曲线
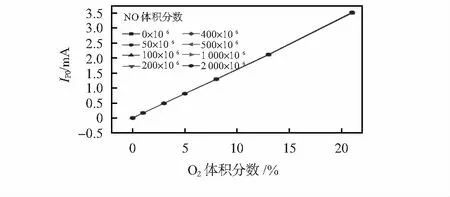
图4 不同NO体积分数下IP0随O2体积分数值变化曲线
图3中,随着O2体积分数增大,为了将更多的O2泵出第一空腔外,VP0从1 % O2体积分数时的88.76 mV增大到了21 % O2体积分数时的345.78 mV;而在同一O2体积分数下,IP0几乎不随外界NO体积分数的增长而产生变化,如图4所示。并且IP0的数值与O2呈极高的线性关系,因此,通过获取IP0可以实现对尾气中O2体积分数的测量,这也说明NOx传感器是一个高精度的O2传感器。这为后面采用IP0表征O2体积分数值,补偿O2对NOx体积分数测量的干扰提供了可能性。
3.2 测量泵泵电压、泵电流分析
VP2与VP0有相似的增长规律。图5中,随着O2体积分数增大,VP2从1 % O2体积分数时的240.16 mV,增长到了21 % O2体积分数时的415.89 mV。这说明在IP1定值反馈控制策略下,VP2会随着模拟气氛中O2体积分数的变化进行调整,从而也说明测量泵的工作状态会受到模拟气氛中O2体积分数的影响。

图5 不同NO体积分数下VP2随O2体积分数值变化曲线
图6中,同一O2体积分数下IP2随NO体积分数变化曲线的拟合优度(R2)均达到了0.99以上,表明在同一O2体积分数下的测量泵电流IP2值有很好的线性关系。但是,在不同O2体积分数下随着NO体积分数的增大,IP2呈开叉趋势,各O2体积分数下IP2随NO体积分数变化的线性拟合曲线斜率呈增长趋势,从0 % O2体积分数时的0.001 18增大到21 % O2体积分数时的0.001 49。由此可知,随着外界O2体积分数增大,IP2受到O2体积分数的干扰并且差异增大。
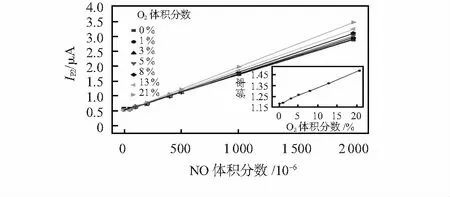
图6 不同O2体积分数下IP2随NO体积分数值线性拟合曲线
3.3 泵电流与NOx体积分数拟合中氧气干扰补偿方法
通过以上分析可以看出,若直接采用IP2线性拟合NOx体积分数,会造成极大偏差。初步分析原因:随着O2体积分数增大,设想通过改变VP0和IP0将更多的O2泵出腔外,保持第一空腔内O2体积分数维持在10-6级,减少对第二空腔中NOx体积分数测量的干扰。但是,实验数据显示,即使10-6级O2体积分数的波动也会对NOx体积分数的拟合带来显著的影响,因此,考虑对NOx体积分数的测量公式中添加O2体积分数的补偿,具体思路如下:
方式1 经典测量中仅仅采用IP2来线性拟合NOx体积分数的算法公式如下
φNOx=a×IP2+b
(1)
式中φNOx为NOx体积分数值,IP2为测量泵电流,a为斜率,b为截距,视a、b为常数。但是考虑到实际测量中O2体积分数波动会对NOx体积分数值有干扰,因此认为系数a或者a、b是与O2体积分数有关的变量,引入与O2体积分数有关的IP0对其进行补偿
a=c×IP0+d
(2)
b=e×IP0+f
(3)
式中c、d、e、f为常数。
方式2 将式(2)代入式(1)可得仅斜率系数a经IP0补偿的拟合公式如下
φNOx=c×IP0×IP2+d×IP2+b
(4)
方式3 将式(2)、式(3)代入式(1)中可得斜率系数a、截距系数b均经IP0补偿的拟合公式如下
φNOx=c×IP0×IP2+d×IP2+e×IP0+f
(5)
式(4)、式(5)均为推导得到补偿O2干扰的拟合公式,其区别在于:前者仅在斜率上采用IP0对经典测量式(1)进行补偿,后者在斜率和截距上均采用了IP0对经典测量式(1)进行补偿。
通过实测数据代入计算可以分别得到式(1)具体系数a、b,式(4)具体系数b、c、d与式(5)具体系数c、d、e、f的数值和NOx体积分数值的拟合公式
φNOx=-387.336×IP2+774.825
(6)
φNOx=-0.051×IP0×IP2+840.119×IP2-390.413
(7)
φNOx=-0.051×IP0×IP2+840.119×IP2+
0.035×IP0-432.420
(8)
再将实测数据经过式(6)~式(8)处理,分别得到式(1)、式(4)、式(5)处理后实际NO体积分数与拟合NO体积分数的曲线如图7(a)~(c)所示。
对比图7可以看出,在图7(a)中拟合后的NOx体积分数值随着O2体积分数的升高呈开叉趋势,其曲线斜率值随着O2体积分数的升高而不断增大,最大、最小值相差了0.244。在图7(b)中其斜率值稳定在1.009附近,最大、最小值仅相差0.021,波动较小。但缺点也较明显,由于截距b为常数,其对截距的处理使得NOx体积分数曲线在纵坐标方向上不够收拢,表现为拟合后的NOx体积分数值较远地偏离实际值,误差较大。在图7(c)中NOx体积分数值与实际NOx体积分数值更为接近,且受O2体积分数的干扰更小。图8(a)~(d)显示了在1 %,8%,13%,21% O2体积分数下方式1~3拟合后NOx体积分数的误差数据,可以看出:方式3拟合出NOx体积分数的误差更接近零点基线,对NOx体积分数的测量更加精准。
总之,对比图7、图8可以得出结论,经方式3处理的NOx体积分数值拟合结果可以使NOx体积分数值呈现更高的对应关系,对NOx的测量更加精准,抗外界O2干扰的能力更强,在一定程度上明显提高了NOx传感器的测量精度。
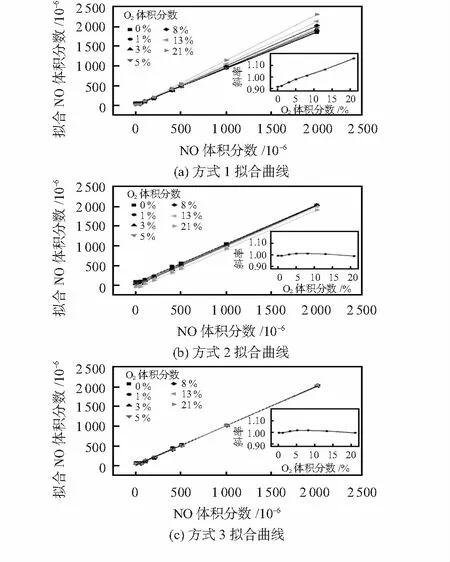
图7 三种方式处理后实际与拟合NO体积分数曲线
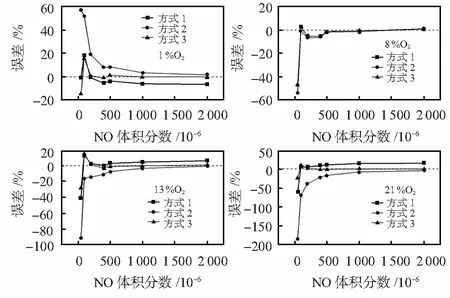
图8 1 %,8 %,13 %,21 % O2体积分数下方式1-3拟合NOx体积分数误差比较
4 结 论
本文提出了一种NOx传感器O2干扰的补偿方法,并推导了计算公式。通过实测数据代入发现:该补偿方法进一步减小了外界O2体积分数变化对最终测出的NOx体积分数值产生的干扰,在测量过程中,O2干扰始终存在的前提下,使测量泵电流与NOx体积分数值呈现出更好的对应关系,显著提高了NOx传感器的测量精度,对NOx传感器的研究、研发及生产过程均有重要的指导意义,有望应用于NOx传感器控制单元的实际控制中。
