架空电力线路巡线机器人及运用分析
2022-09-08纪湛
纪湛
广东建能电力工程有限公司,广东广州,511400
0 引言
架空电路是我国电力体系中不可或缺的重要组成部分,但是常规的人工巡检一直存在工作难度高、风险大的问题,导致电力企业无法有效获得线路状态信息,增加了输电线路运行风险发生率。针对上述问题,越来越多的学者开始推广巡线机器人技术,该机器人具有工作效率高、精度满意等优点,成为未来智能化电网的重要组成部分,其发展前景广阔,值得关注[1]。
1 巡线机器人技术分析
本次研究中所介绍的巡线机器人能够用于高压架空输电线路的安全检查,在多传感器控制的基础上,实现了自动化控制、机械学与传感器技术于一身,能够满足恶劣气候条件下的巡视要求。因此在本次设计中,巡线机器人应该具有以下功能:(1)机器人可以在架空电力线路上正常运行;(2)机器人可以识别不同工况,如障碍的影响;(3)可以在分辨障碍物的基础上快速跨越;(4)可以经无线系统将线路的状态信息反馈给指挥平台。
2 巡线机器人的硬件构造
2.1 总体系统结构
本文所介绍的巡线机器人硬件结构如图1所示。
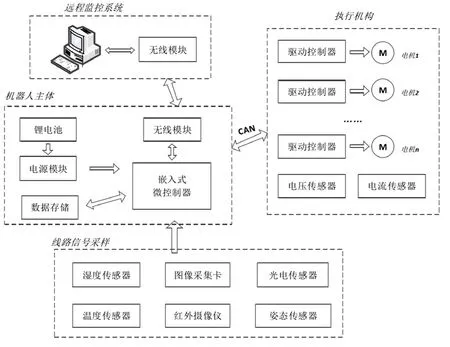
图1 巡线机器人的结构图
从图1所介绍的信息中可知,该机器人整体可以分为机器人主体、远程监控系统、线路信号采样以及执行机构四个方面,其中机器人主体部分是核心,可以经过对线路信号的实时采样来判断机器人当前架空线路的状态情况。在机器人运行过程中,可经过CAN总线来实时监控、调整机器人的运行状态并与地面控制系统之间完成信息交互。
2.2 主控制器的电路设计
(1)机器人的主控制器。在设计机器人主控制器系统中,该系统能够完成对外信号的采集,所采集的数据包括机器人的姿态信息、架空线路的图像信息、温湿度信息等,并且在对上述信息资料进行处置的基础上,由自动化系统操控机器人的运动过程(工作人员也可以根据巡检要求提出不同的控制指令)。因此本文选择NXP公司推出的MPC微处理器为主控制器,该微处理器的主频高达200MHz,而因为该机器人的任务量巨大,该微处理器的主频高则可以保证控制器的运行效率。同时该处理器内部提供延迟互锁的校验核,该装置可以提高机器人运行的安全性,避免因为故障而影响正常功能。
(2)电机驱动设计。根据图1介绍的机器人结构,电机驱动在整个机器人运行系统中占据着重要作用,因此在本次执行机构设计中使用直流无刷电机,经单独的电机驱动单元来控制直流无刷电机,并且能够输出信号驱动电机的运作,与控制指令之间形成快速响应。在对上述系统功能进行考虑后,本次设计中选择TMS系列为机器人驱动控制器的核心,作为一块32位微控制器,该设备在驱动与传感等几方面均实现了优化改进,被广泛应用在电机驱动等方面;该电机的外设资源丰富,能够提供60MHz主频,有良好的响应与处理机制,可以支持多种控制策略的实现。
(3)系统电路设计。本次设计方案中的电源电路采用了3.3V电压供电的方法,在经过电容、电感来滤波处理电源电路之后,将输出电源波纹控制在较低水平;同时为保障信号系统的抗干扰性,在本次研究中同时增设数字电源来满足系统数字电路供电的要求,经零欧姆电阻模拟地连接之后,维持电位相等[2]。
(4)电源设计。考虑到该机器人需要长时间独立运行在架空输电线路上,所以只能使用移动电源的方法提供稳定动力,同时因为巡线机器人每个电子单元所能提供的电源电压等级不同,其中主体部分机器人需要信号级电源,而信号采样部分需要负极性电压支持信号转换过程,所以在对上述功能的考虑后本文提出了一种系统电源电路体系,具体如图2所示。
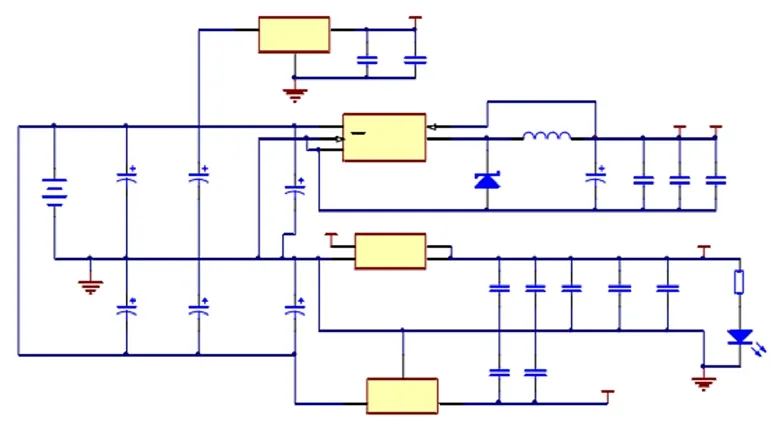
图2 机器人的电源电路结构图
在图2介绍的电源结构下,使用24V容量50000mAH锂电池供电,经LDO转化器可以将其转换为+12V、+5V、+3.3V、-12V等不同等级的电压,确保能够为机器人不同功能单元提供能源。
2.3 摄像头及其系统设计
(1)摄像头的选择。巡线机器人应具有在架空线路上自主翻越障碍的功能,并且能够记录线路的状态,所以摄像头的成像质量对机器人性能有直接影响。所以在本次设计中本文选择了ALENTEK推出的OV5640型号摄像头,该摄像头选择了500W像素高清摄像头集成模块,该摄像头采用了1.4×1.4um像素,并且具有自动图像采集功能,也能提供自动白平衡与自动曝光等功能。最后该摄像头可以提供嵌入式处理器,方便技术人员的后续功能开发。
(2)摄像头应用电路的设计。因为该摄像头内部已经设置了嵌入式处理器与操作线路,所以在应用电路设计中应将输出信号端与巡线机器人主控器连接。因此在本次系统设计中,根据摄像头的电源需求分别提供1.5V、2.8V与3.0V三种等级的电压,经STROBE引脚自主控制。
2.4 姿态信号采样
姿态信号采样的主要功能是记录、识别机器人在架空线路上的运行状态情况,当不需要跨越障碍物的情况下,机器人行驶轮与架空线路啮合,因此机器人可以维持平衡状态;但是在跨越障碍物时,需要机器人将一条手臂驶出架空线路,这种情况会改变机器人的平衡状态,所以在信号检测中应该根据平衡状况判断障碍执行动作,最终来保障机器人的安全性。
本文使用了MPU6050姿态检测装置,该装置集成了加速度计传感器与陀螺仪,可以检测空间不同维度的轴向运动姿态运动变化,再加之集成具有拓展功能的DMP运动处理器,聚集良好的抗干扰性,并且可以为后续功能开发提供必要的支持。
3 软件设计方案
3.1 驱动电机控制器的设计
根据前文设计的内容,在本次设计中机器人电机控制器使用了电流、转速双闭环控制策略,其中在闭环调节器中采用了PI调节模式,该模式的主要优点就是可以监测直流无刷电机的相电流信号以及转速信号。
在软件设计中主要根据电机驱动控制器的不同状态进行设定,目前其常见状态主要分为故障、暂停以及运行三种状态。其中在空闲状态下,系统初始化后开始等待工作人员发送的运动指令,当系统接收运动指令后即可进入到运行状态。在进入到运行状态中内控制器解析控制指令并为驱动电机提供转速给定值,并且开始记录电机的转速、电压以及霍尔传感器等关键数据,并根据数据库资料执行系统控制算法,保障了整个线路检测功能的实现。该系统提供电路信号故障检测功能,当系统发生故障之后系统会识别机器人的异常电流信号并进入到故障状态。在故障状态下,驱动电机控制器开始控制PWM的输出,电机运动过程停止,系统开始向上反馈控制器的运行数据信息[3]。
3.2 图像解析软件设计
摄像头所采集的所有图像数据会实时发送给对面控制站,在图像数据传输过程中,每一个PCLK时钟周期内会输出8位/10位的数据。系统通讯为8位接口,所以系统每输出一个字节都会记录,且每两个字节可以组成像素颜色。
摄像头活动侧的图片按照最小编码单元方式进行压缩与存储的,其中每个最小标码单元均由8×8像素组成,并按照从左到右、从上到下的方式存储。图像信号的解码过程主要可分为Huffman解码、量化以及IDCT三个步骤组成,所有图像可经过YUV色彩图像空间来描述图像信息,通过调整系统的亮度、色度等参数可以将其图像进行解码,而在解码后的图像就是可以用于解读的灰度图像。
3.3 越障执行策略
当机器人在架空线路上行走时,所产生的行走动作主要分为无障碍行走与障碍物翻越两方面内容,在运行中机器人可按照传感器所识别的架空线路环境变化情况执行动作,执行动作的单元则是电机。
为实现上述功能设定目标,除了设置摄像头来采样线路信号之后,巡线机器人在三个手臂上均设置光电传感器。在正常运行期间,当光电传感器识别到障碍物信息之后此时主控制器可以接收反馈信号,此时主控制器可以识别机器人在翻越障碍物后,记录前臂、中臂、后臂与障碍物之间的距离,检测结果可以用于判断机器人是否已经远离障碍物。此时在正常线路上行走时,摄像头可以捕获到障碍物的位置并开始执行手臂跨越障碍的动作,此时先由前臂行走脱线,之后后臂旋转,经中轮与后轮驱动作用下使机器人顺利越过障碍物,当后轮回归正常的行走状态下,经传感器可以判断后轮与障碍物之间的距离,确定了两者之间存在一定的距离后,机器人开始继续执行直线无障碍行进。
4 高架线路巡线机器人的应用分析
4.1 应用场景简介
为判断本文所开发的巡线机器人的合理性,按照上文内容开发了三臂巡检机器人,巡线机器人与地面控制系统之间采用了CC2500通讯的方法,同时为了能够降低工作人员操作机器人的难度,在操作箱上设置了摇杆工艺,经过摇杆即可判断巡线机器人的运行状态情况,具有操作方便的优点。同时在操作系统中设置LCD液晶显示屏,该装置可以显示巡线机器人所发送的输电线路照片以及巡线机器人的运行状态数据等资料[4]。
4.2 运行效果分析
根据本文对巡线机器人运行状态的检测后,最终检测结果证明巡线机器人可以沿着高压输电线路稳定运行,并快速检测输电线路的安全等级参数;机器人也可以在运动过程中清理输电线路上残存的垃圾。
在对机器人运行过程进行分析后,对其开展了多个方位的检测,检测结果显示,巡线机器人在架空线路运行中可以发送图像数据,且地面站操控箱可以接收巡线机器人所传送的远程数据,整个数据传送过程并未受到高压电磁干扰的影响,信号输入效果稳定。
在调试模式下,结果显示机器人可以将处理后的图像数据发送至处理站,根据摄像头采样原图、经灰度阈值处理后的二值化图像以及经Canny检测到的障碍物图像对比后,最终结果证明该机器人可以快速识别线路上的障碍物,具有优势。
根据巡线机器人运行过程中对各类障碍物的执行与越过情况的分析,机器人顺利通过障碍物,未发现机器人掉落或者无法翻越障碍物的问题,取得了预期效果。
本次研究中为了保证研究结果的稳定性,通过机器人共进行了十次检测,最终检测结果证明,在10次运行中,其中有3次运行结果显示为异常,其中2次检测发现线路绝缘皮被破坏,1次发现了严重的线路断股问题,在工作人员抵达现场之后,证实上述问题存在。这一结果证明,在架空线路机器人运行过程中,该装置可替代工作人员完成复杂情况下的系统检测,并且发现线路中存在的问题,方便工作人员及时采取应对措施,维护了电力系统的稳定性。
最后根据机器人的运行时间来看,检测结果显示每次运行时间约为1.2~2.3h,续航时间满足电网管理的要求。
5 结语
架空电力线路巡线机器人的开发满足未来电力系统安全运行的要求,在技术上具有可行性,本文所介绍的巡线机器人开发方案在技术上具有可行性,能够提高加工线路巡查的工作效率,取代传统人工巡视的工作模式,并且技术实践经验证明该设计方案科学有效,提示本文所提出的机器人设计方案科学有效、值得进一步推广。
