基于无线信号控制系统的调车防护功能研究
2022-09-07柯长博温抿雄宋沛东屈永正
李 涛,王 杰,柯长博,温抿雄,宋沛东,屈永正
(1. 湖南中车时代通信信号有限公司 北京分公司,北京 100070;2. 株洲国创轨道科技有限公司,湖南 株洲 412001)
0 引言
神朔铁路是我国西煤东运的大通道,为国家I 级电气化重载铁路[1]。随着运量不断加大,行车密度不断增加,神朔铁路各车站调车作业与接发列车之间的干扰越来越大[2]。调车作业的紧张必然加大不安全因素。同时,神朔铁路各车站多处于农村偏远处,各种设备的设置和维护受到很大限制,调车作业环境差、安全隐患多。在进行各种调车作业时,如果作业上有过失或技术设备发生故障,易造成调车事故的发生[3]。
调车作业是铁路运输生产的关键环节[4],其包括列车编组、解体、摘挂、转线、车辆取送、转场、调移、机车出入段及中间站转线等[5]。传统的调车防护系统由车上的蓝灯防护装置、显示终端、地面信息接收器和地面应答器组成。地面应答器通过安装在信号机内的互感器读取并储存蓝灯和白灯的状态[6]。当机车上的地面信息接收器通过应答器上方时,将应答器中的信号机状态信息、应答器位置信息等读取到机车上的蓝灯防护装置内。蓝灯防护装置根据获得的信息计算出调防信息,并送至安装在司机台上的显示终端显示。
神朔铁路共有14 个中间站,2 个区段站,2 个越行站,1个会让站[2]。各车站的调车作业基本涉及车站所有线路的使用,如果采用传统的调车防护系统,则新增设备多、投资大、系统复杂。为此,本文研制了一套适合神朔铁路线路特点的调车防护系统(简称“调防系统”)。该系统可实现地面控制设备集中设置,避免在各偏远车站新增设备;车地之间使用无线通信,保证信息的实时传输;同时尽可能复用既有设备,减少投资。
无线信号控制系统(radio based signalling control system,RBSC)是神朔铁路智能驾驶系统的地面信号控制中心。基于RBSC设置调车防护功能,将调车防护相关的数据和功能都增加到RBSC 中,由RBSC 从联锁(computer based interlocking,CBI)获取站场动态信息,生成调车防护信息后直接发送给列车运行监控装置LKJ,这样充分利用了RBSC、LKJ、CBI等既有设备,不仅可以避免新增设备、重复投资,还可以缩短系统开发周期。
本文在阐述神朔铁路基于RBSC的调车防护系统架构及工作原理基础上,对RBSC 新增的调车防护功能,进行了详细的研究分析和方案设计。
1 基于RBSC的调车防护系统
本节主要介绍基于RBSC的调车防护系统的架构和基本的工作原理。
1.1 系统架构
基于RBSC 的调车防护系统如图1 中蓝色方框部分所示。其主要包括RBSC、CBI 或CTC 站机(CTCZJ)、LKJ、北斗卫星定位系统、应答器、道岔、轨道区段,及信号机等。调防系统的所有设备均复用了神朔铁路智能驾驶系统中的设备,未新增专门的控制设备。

图1 调车防护系统架构Fig.1 Architecture of the shunting protection system
1.2 控制原理
基于RBSC 的调车防护系统采用RBSC 与LKJ 之间直接通信的方式来实现调车防护功能。
由CBI 或CTCZJ 获取站场状态信息,包括道岔状态、区段状态、信号灯颜色和亮灭状态,这些信息发送给RBSC 后再由RBSC 计算出各个车站的调防信息。LKJ 通过地面应答器和北斗卫星定位系统进行定位,确定列车位置后向RBSC 发送位置报告。RBSC 根据LKJ发送的位置信息计算列车所在车站和前方一定范围内车站的调防信息,并计算出调车行车许可,其通过LTE/LTE‐R 无线网络发送给LKJ,用于列车调车作业监测控制。
2 RBSC计算调防信息和列车位置
本节主要介绍RBSC 如何计算出调防信息,以及RBSC如何对列车进行定位。
2.1 RBSC计算调防信息
RBSC 与CBI 或CTCZJ 的连接方式如图2所示。
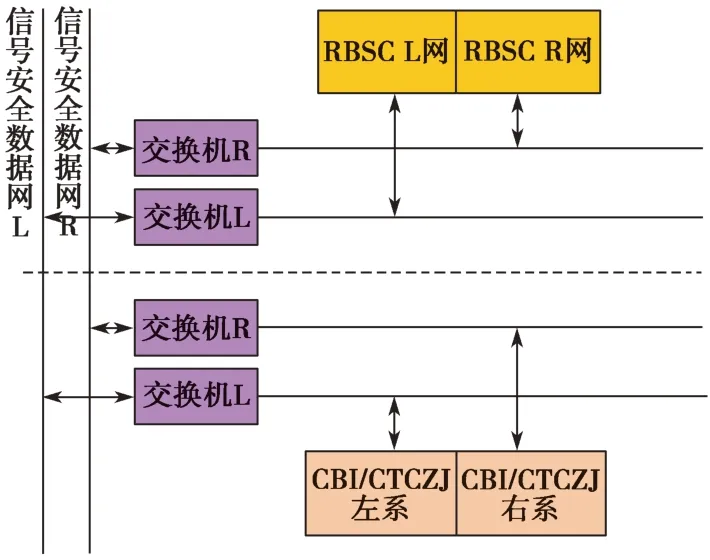
图2 RBSC 和CBI/CTCZJ 之间的连接方式Fig.2 Connection mode between RBSC and CBI/CTCZJ
联锁系统以车站内的道岔、进路和信号机为控制对象[7],按一定程序和一定条件建立这些控制对象之间的相互联系和相互制约的关系,以控制站场内的信号机和道岔等设备,保障站内作业安全[8‐9]。由RBSC接收来自CBI或CTCZJ的站场状态信息,包括以下基本内容:
(1)列车信号机状态信息。CBI或CTCZJ管理范围内且在RBSC控制范围内的所有列车信号机(包括进站信号、出站兼调车信号)状态信息,以信号灯灯位状态的形式由CBI或CTCZJ发送给RBSC。
(2)调车信号机状态信息。CBI 或CTCZJ 管理范围内且在RBSC控制范围内的所有调车信号机状态信息,以信号灯灯位状态的形式由CBI或CTCZJ发送给RBSC。
(3)道岔状态信息。CBI 或CTCZJ 管理范围内且在RBSC控制范围内的所有道岔状态信息,以定表、反表、单锁及单封等状态的形式由CBI或CTCZJ发送给RBSC。
(4)区段状态。CBI 或CTCZJ 管理范围内且在RBSC 控制范围内的所有区段锁闭状态信息(包括无岔区段和股道区段),以占用、锁闭状态的形式由CBI或CTCZJ发送给RBSC。
(5)表示灯信息。CBI 或CTCZJ 管理范围内且在RBSC 控制范围内的各类表示灯状态,以信号灯灯位状态的形式由CBI或CTCZJ发送给RBSC。
RBSC 与LKJ 车载设备被事先约定好信号机、道岔、轨道区段等站场状态信息的码位表,并将码位表分别配置到RBSC和LKJ的数据中,并使两者保持一致。RBSC获取上述站场的动态信息后,严格按照码位表将站场状态信息进行实时更新,从而形成站场的调防信息,以便随后发送给对应的车载LKJ 设备。车载LKJ 设备收到RBSC发送的调防信息后,按照对应的码位表对站场状态信息进行实时更新,以获得实时的站场调防信息。
2.2 RBSC计算列车位置
由RBSC 通过LTE/LTE‐R 无线网络接收来自车载LKJ 的定位信息。车载LKJ 基于北斗卫星定位系统实现列车高精度定位,同时在站场一些特殊位置设置定位应答器辅助定位。首先,由地面工作人员在车站的信号机、道岔岔心等处采集北斗卫星定位数据并作为RBSC 和车载LKJ 定位的关键点,RBSC 和车载LKJ 内部会将这些关键点作为控制基准,供定位使用;同时,在车站的咽喉、出站口、RBSC 交权边界等处设置真实的定位应答器作为关键点,供定位使用。
当车载LKJ 基于两个相邻的关键点发送位置报告时,RBSC 应该根据列车报告的两个关键点标识号以及列车前端与两个关键点的距离,确定列车前端所在的位置,如图3 所示。定义从关键点1 到关键点2 的方向为基准方向,车载LKJ 发送位置报告时,包含列车实际运行方向相对于该基准方向的相对关系,这样就可以准确定位出列车的位置和运行方向。
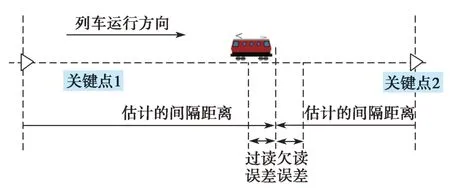
图3 列车定位示意图Fig.3 Schematic diagram of train positioning
若车载LKJ 无法通过北斗卫星定位系统确定自己的位置,则由司机与地面调度中心共同确认列车所在车站或者列车前方车站后,由司机通过LKJ 界面手动选择车站信息并发送给RBSC,RBSC 根据司机手动选择的车站信息计算并发送对应车站的调防信息。
3 RBSC 调防信息发送机制和行车许可计算
3.1 调防信息的发送机制
RBSC根据车载LKJ发送的位置信息计算所需要发送的调防信息,并根据LKJ 的位置向前搜索一定距离内的车站,如图4 所示。RBSC 首先根据列车发送的位置与RBSC 内部配置的站场数据进行比对,只要列车车头至车尾所跨压的区段在站内,就认为列车LKJ所在位置为站内。

图4 搜索车站示意图Fig.4 Schematic diagram of station searching
根据列车所处的位置以及数据配置,调防信息的发送机制如下:
(1)如果LKJ当前所在位置为车站,则RBSC除了要发送本站的调防信息之外,还需要按照列车运行方向从列车位置开始向前搜索一定的距离(神朔铁路目前是向前搜索5 km)。如果前方5 km 范围内存在另一个车站,则向LKJ 发送当前车站及前方5 km 范围内第一个车站的调防信息;如果LKJ 当前所在位置前方5 km范围内不存在另一个车站,则仅向LKJ发送当前车站的调防信息。
(2)如果LKJ 当前所在位置不在站内,则从LKJ当前所在位置向前搜索,如果前方5 km范围内存在车站,则RBSC周期性地向LKJ发送前方5 km范围内车站的调防信息;如果LKJ当前所在位置前方5 km范围内不存在车站,则RBSC不向LKJ发送调防信息。
(3)RBSC 每周期最多同时向LKJ 发送2 个车站的调防信息。需要发送2 个车站调防信息时,若2 个车站的调防信息组成的1 个消息包未超过最大长度限制时,应在1 个信息包内发送;否则,每个车站的调防信息通过1 个消息包在一个周期内发送。若仅需要发送1 个车站的调防信息时,则通过1 个消息包发送即可。
(4)对于相邻的两个RBSC,涉及调防信息交互的问题。RBSC根据线路实际情况,通过数据配置决定是否每周期向相邻RBSC发送交权边界前方第一个车站的调防信息。当RBSC从相邻RBSC接收到调防信息,如果可以确定LKJ与相邻RBSC边界的距离小于配置距离(根据线路实际情况决定),且本RBSC 范围内需要发送调防信息的车站数量小于2,则应将来自相邻RBSC的调防信息向LKJ转发。
3.2 行车许可计算
RBSC 通过CBI 或CTCZJ 获取站场状态信息,根据列车的位置计算调车行车许可,并将调车行车许可通过LTE/LTE‐R 无线网络发送到LKJ。LKJ 依据调车行车许可对调车作业进行安全防护,控制列车进行调车作业。
RBSC仅为一个编组内的本务端LKJ计算并发送行车许可,不向编组内的其他非本务端LKJ 发送行车许可。RBSC从列车所在位置向线路前方搜索,按照道岔锁闭状态、区段占用空闲状态、进路状态等信息计算列车可以向前行驶的距离和停车点,并将行车许可范围内的线路数据信息,如线路允许速度、临时限速、线路坡度等信息,连同行车许可一同发送给车载设备,供车载设备使用。对于行车许可范围内包含的调车进路,RBSC 需要将调车进路的起点位置、长度和所限定的列车速度发送给列车。
车载LKJ通过从RBSC实时获取的调防信息和调车行车许可,确定列车前方可以走行的距离,以及可走行距离内的允许速度、坡度、调车进路起点/终点等信息;再结合列车的制动距离计算出安全防护曲线,以防止调车作业过程中越过关闭的调车信号机,对列车调车作业进行安全防护,如图5 所示。图中,红色曲线是LKJ 计算的安全防护速度曲线;绿色曲线表示列车实际运行速度曲线。在调车作业过程中,如果机车实际运行速度超过安全防护速度的规定值,系统通过LKJ 设备输出相应的牵引/卸载、常用或紧急制动控制指令,有效避免冒进风险。

图5 安全防护曲线Fig.5 Curve of safety protection
4 系统应用情况
2019 年10 月16 日,我国首列智能驾驶重载列车正式在神朔铁路开行。现场投入使用的一台RBSC 实现了神木北机务段、神木北站、燕家塔站、朱盖塔机务段、朱盖塔站的调车防护功能,且不需要在这些车站设立专门的调防控制设备。这样,一个标准站约节省60万元。RBSC被集中放置于一个设备机房内,设备数量少、控制车站多,大大减少了施工和后期维护的工作量。
经机车运用单位对机车监控记录文件进行统计分析,系统投入试用以来,基于RBSC的调车防护系统工作良好,满足系统设计需求,提高了工作效率(经换算,每日可多开行5~6列万吨重载货运列车)[10]。现场试用进一步验证了系统的可用性和安全性。神朔铁路现场LKJ调防信息显示界面如图6所示。

图6 LKJ 调防信息显示界面Fig.6 Shunting protection information display interface of LKJ
5 结语
本文介绍了基于RBSC的调车防护系统架构及控制原理,分析研究了RBSC 调车防护功能的运算和处理逻辑。该方案充分利用RBSC运算能力强、可配置站场数据多的优点,基于RBSC增加调车防护功能,节省了大量的开发时间和投资成本。自投入试用以来,基于RBSC的调车防护系统工作稳定、良好。下一阶段将进一步提升基于RBSC 调车防护系统的自动化水平,以提高调车安全的机控程度,降低人员的工作强度。