便携式微振动可视化测量仪的设计与实现
2022-09-07赵海娇单明广熊雪芬朱皓东邓伊洁
赵海娇,单明广,熊雪芬,朱皓东,邓伊洁
(哈尔滨工程大学信息与通信工程学院,哈尔滨 150001)
1 引 言
微振动广泛存在于工业生产、精密设备加工制造和精密设备运作等场景中,具有易被环境噪声和系统噪声影响,且难察觉、难测量、难测准的特点,对生产安全、加工精度和运作效果都会产生重要影响,因此,对其进行监测与预防具有重要意义。
对于微振动的测量,当前被广泛使用的方法可分为接触式法与非接触式法。 其中,接触式法主要使用基于不同原理传感器的加速度计,包括压电加速度计、应变加速度计和微机电系统加速度计等;非接触式法主要以激光多普勒测振方法为代表。 然而,在一些实际应用场景中,以上方法都具有不同程度的局限性。 例如,精密仪器本身对外界的干扰很敏感,接触式测量法要将传感器探头贴在被测物表面会产生负载效应;此外,该方法还存在只能进行单点测量以及布线繁杂等问题。非接触式的激光多普勒测振方法分为单点测量与扫描式测量,扫描式测量虽然可以进行面测量,但测量速度慢、效率不高,且激光多普勒测振仪存在体积大、价格昂贵的问题;而视觉测量是非接触式振动测量中的新兴方法,代表性的有数字图像相关法和光流法,但对微振动测量没有针对性。
因此,本文研究了针对微振动的非接触式视觉测量技术,将相机作为信号采集设备,并提出基于盲源分离的灰度平均测量算法来提取振动信号。本方法测量结果与电测法和光测法只得到一串数据的形式不同,不仅能实现振动信息的准确提取,还能实现对微振动的可视化。 在此基础上,基于嵌入式开发平台将测量系统集成化,研制了便携式微振动可视化测量仪器,可为微振动测量提供新方案。
2 系统工作原理
基于视觉的振动测量系统由LED 光源、相机和计算机组成,如图1 所示。 其中,LED 光源为被测物打光以提高成像质量,减少成像系统的噪声干扰;相机作为信息采集设备,采集振动物体视频并保存;计算机用于数据处理,从相机传输的图像数据中提取振动信号并将微振动可视化。
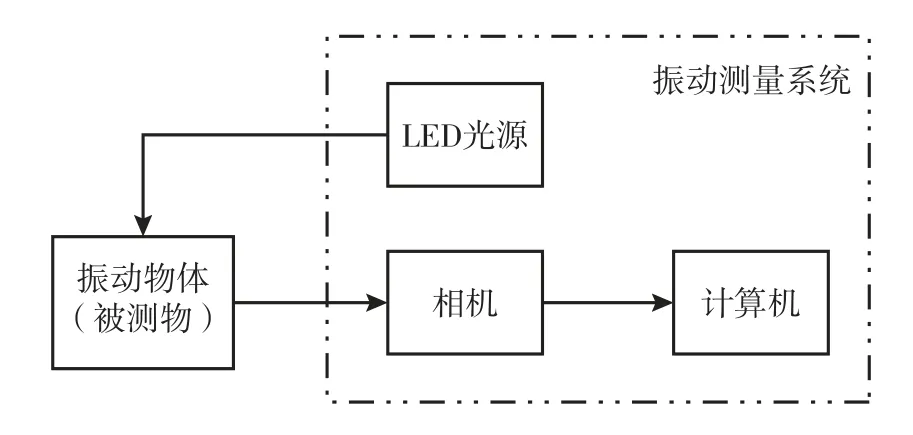
图1 振动测量系统结构Fig.1 Vibration measurement system structure
在测量过程中,光源发出的光照射在振动物体(被测物)上,而被测物反射的光信息被相机捕捉,形成包含振动信息的视频帧传送至计算机,经算法处理将微振动可视化后,提取振动信号并显示。
3 可视化测量基本原理
微振动可视化测量算法分为频率测量与视频放大两部分,分别实现振动信号提取和微振动可视化,如图2 所示。 频率测量包括信号提取区域选择、灰度平均和ICA(Independent component analysis)盲源分离。 首先,信号提取区域由手动选择,并在该区域内随机生成三个小区域,因为假定视频中主要信号分为振动信号、强低频噪声干扰和其他嘈杂信号。 其次,分别对三个小区域作灰度平均,得到三个一维时域信号,灰度平均能有效提取区域内信号,抑制噪声干扰,具有较强鲁棒性。 最后,将生成的三个一维信号组成观察矩阵,通过ICA 盲源分离算法得到最终测量结果。 对于难以分辨的微振动使用视频放大方法,在视觉上将其可视化,使测量过程更加直观。

图2 微振动可视化测量算法流程Fig.2 Algorithm flow of micro⁃vibration visual measurement
3.1 图像灰度平均法
对于视频中物体振动信号的提取,仅聚焦于一个像素位置的信息是不够准确的。 一方面振动区域由很多像素点组成,信噪比有高有低,而信噪比最高点的位置无法直接确定,随意选取的点不能保证测量效果;另一方面微振动本身容易受到噪声干扰,选取单个像素位置作为测量点鲁棒性不强。 因此,振动信号的提取需要综合振动区域内像素点的信息,在这里对区域内像素灰度值取平均值构成综合振动信号S(t)。
即

式中:x——每个像素点时域信号;t——采样时刻点,对应时域信号时刻点;i——像素点在图像中所在的行数;j——像素点在图像中所在的列数;m——图像像素矩阵的行数;n——图像像素矩阵的列数;N——每帧图像像素总数。
假设手动选取的振动区域共有N 个像素点,即N 个振动信号,这些信号由有用信号和噪声混合而成,并且有用信号以频率相同、幅值不同的形式存在。 为了直观展示图像灰度平均法的效果,对某一振动物体视频进行信号提取,如图3 所示,1 号位置的红色曲线代表平均后的综合信号,其他曲线代表部分像素位置的局部信号,红色曲线即其他曲线取平均后的结果。 可以观察到,许多像素位置的信号信噪比极低,但经过平均处理后的综合信号呈现高信噪比状态。

图3 综合信号与部分局部信号示意图Fig.3 Schematic diagram of integrated signal and some local signals
3.2 ICA 盲源分离算法
ICA 即独立成分分析,是随盲源分析理论发展而来的一种独立源信号提取算法。 假设有n 个独立的信号源可以表示为:S =[s,s,…,s],通过一个混合矩阵A =[a,a,…,a]进行混合得到观测信号X =[x,x,…,x],即

在这里,三个子区域提取的时域信号即为已混合的信号,成分定义为振动信号、低频环境噪声和嘈杂的系统噪声,因此n =3,X =[x,x,x]。
由公式(2)可知,观测信号是已知的,混合矩阵和源信号是未知的。 假设混合矩阵是一个可逆矩阵,那么ICA 算法的本质就是求解一个分离矩阵W,也就是混合矩阵的逆矩阵,来实现对观测信号X的分离,得到分离信号Y,Y =[y,y,…y]。

因此,ICA 盲源分离算法的核心就是分离矩阵的求取,在源信号和混合矩阵未知的情况下,对观测信号进行预处理,包括中心化和白化,并通过设置的收敛条件不断修正,得到最终的分离矩阵。
3.3 欧拉视频放大方法
视频放大算法具有放大视频中微小运动的作用,而欧拉视频放大算法兼顾了效果和速度,其算法框图如图4 所示。 该算法主要包含四个步骤:(1)空间滤波将视频序列分解为多空间分辨率的图像;(2)时域滤波是对不同尺度图像进行频域带通滤波,得到目标频带;(3)线性放大目标频带信号,并加回原信号;(4)视频重建是将经过处理的多尺度图像进行金字塔重建,得到放大后的图像,进而输出视频。

图4 欧拉视频放大算法框图Fig.4 Flow chart of eulerian video magnification block diagram
运动放大的实现过程可由一阶泰勒展开式推导得出

式中:α——放大倍数;δ(t)——位移信号。
上述推导需要满足文献[15]中给出的指导性条件

式中:λ——图像的空间波长。
4 便携式系统设计与实现
便携式系统基于RK3399 芯片进行开发,使用C++编程语言,根据功能需求完成软件设计,外接相机等输入设备和显示屏等输出设备,具有结构紧凑、操作便捷的特点。
4.1 硬件设计与实现
硬件系统由数据处理模块、输入模块、输出模块和供电模块组成,如图5 所示。 数据处理模块为big.LITTLE 核心架构的RK3399 芯片,负责测量过程中所有数据的计算与交换;输入模块包括触控设备和摄像头,负责功能触发与视频采集,其中摄像头模块选用标准UVC 协议的CMOS 摄像头模组,支持60 帧640 P 视频采集,同时在RK3399 平台上满足60 帧稳定采集不掉帧;输出模块为显示屏,负责显示功能界面和数据处理结果;供电模块负责同时给数据处理模块与显示屏供电。 以上模块结构紧凑,便于集成,达到了操作便捷的目的。

图5 硬件系统组成图Fig.5 Hardware system composition diagram
4.2 软件设计与实现
软件系统主要包括三个模块:管理硬件设备、调用应用程序及控制整体工作过程的主模块,频率测量子模块和微振动可视化子模块。 软件设计流程如图6 所示,主模块对硬件设备进行初始化,对输入信息或指令进行初步判断并将数据传输给应用程序进一步处理,将需要输出的数据通过硬件输出设备展示,以及进行子模块之间的数据沟通;频率测量模块主要通过执行灰度平均、盲源分离、傅里叶变换等算法实现对振动的测量;微振动可视化模块在判断是否需要视频放大后选择性启动,实现对微幅振动的放大与显示。

图6 软件设计流程图Fig.6 Software design flow chart
根据算法流程与功能要求,使用C++实现系统软件设计,软件集合了参数设置、功能调用和结果显示等功能,所有操作一站式完成。
4.3 系统功能验证
硬件和软件集成形成便携式振动测量系统,如图7 所示。 设计了悬臂梁振动测量试验以验证软硬件集成后的仪器性能。 振动测量系统对悬臂梁的视频采集、数据处理和结果显示一站式完成。

图7 便携式振动测量系统Fig.7 Portable vibration measurement system
悬臂梁振动的频率与其悬空的长度相关,长度越长,频率越低,并且长度固定,频率也固定,这是由钢制悬臂梁固有特性决定的。 轻轻拨动并等待其振动幅度下降到肉眼难以观察的程度时开始测量。 与此同时,为验证测量的准确性,使用加速度计对振动的悬臂梁同时进行测量,加速度计传感器探头粘贴于悬臂梁表面。
如图8 所示,传感器测量结果为5.510 Hz,本系统测量结果为5.512 Hz,相对误差为0.04%,二者测量结果基本吻合,微振动可视化效果良好,验证了仪器的各项功能。

图8 悬臂梁振动测量结果Fig.8 Cantilever beam vibration measurement results
5 试验与分析
为进一步展示仪器的测量过程及优越性,对悬臂梁振动测量试验与水杯晃动测量试验进行分析。其中,悬臂梁振动测量试验通过分步叙述展现测量过程与效果。
5.1 悬臂梁振动测量试验
仪器测量的主要过程包括灰度平均、盲源分离和视频放大,悬臂梁测量步骤为:
第一步,如图9(a)所示,在悬臂梁视频画面中选择测量区域,并随机生成三个小区域进行灰度平均计算。
第二步,将三个区域灰度平均结果组成观察矩阵进行盲源分离,得到一个振动信号和两个噪声成分,其中振动信号频率为21.67 Hz,结果如图9(b)所示。
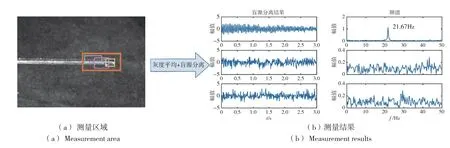
图9 测量区域选择与测量结果Fig.9 Measurement area selection and measurement results
第三步,通过视频放大实现微振动可视化,悬臂梁振动幅度在视觉上得到放大,便于试验者观察。
5.2 水杯晃动测量试验
容器在外力作用下产生摇晃,内部的液体就会产生晃动,并且在短时间内振幅逐渐降低至零。 对于这类晃动频率的测量,工业生产中一般采用激光位移传感器,但由于大多数液体具有良好的透射性,为了增强激光的反射信号,会在待测容器里撒入水粉颜料等物质,这可能会破坏被测物,造成诸多不便。 所设计的测量仪器属于非接触式测量,较好地解决了这一问题。
如图10 所示,测量结果中时域波形呈现出幅度较快衰减至零的趋势,并且测得液体晃动频率结果为3.735 Hz。

图10 液体晃动频率测量结果Fig.10 Screenshot of liquid sloshing frequency measurement results
6 结束语
设计了一款便携式微振动可视化测量仪,通过试验验证,微振动可视化效果良好,频率测量结果与加速度计比对误差在0.5%以内,保持较好的准确度。 根据相机与被测物之间的距离大小和相机的可用分辨率,振动幅度的测量范围在图像中可达亚像素级别,对应可测量的物理幅度可在微米到几毫米之内调整。 该测量系统可实现基本的振动测量功能,为振动监测与防范领域带来新的选择,但因相机帧率较低,在奈奎斯特采样定律的限制下只能对30 Hz 以下振动物体进行测量,在未来将聚焦于数据处理内核的升级以及欠采样测量算法的研究,最终实现对高频振动物体的测量。
