复杂工况下的直升机行星传动轮系故障诊断
2022-09-07孙灿飞黄林然沈勇
孙灿飞,黄林然,沈勇, 2
1. 航空工业上海航空测控技术研究所 研究中心,上海 201601 2. 故障诊断与健康管理技术航空科技重点实验室 试验与验证中心,上海 201601
行星传动轮系作为直升机动力传动系统的核心部件,对整个直升机飞行安全具有重大影响。无论是从故障的发生频次还是危险程度考虑,传动系统行星传动轮系既是直升机健康监测和故障诊断的重点和难点,也是直升机机械部件故障诊断方法研究的热点。
相较于常规行星齿轮箱,直升机行星传动轮系的使用工况更加复杂恶劣。一是复杂的工作状态,主要体现在负载大范围变化。随着飞行状态的变化,旋翼载荷同步改变,直升机行星传动轮系运行工况也随之变化。变负载造成行星传动轮系齿轮啮合振动出现变化,信号形态更加复杂多变。二是恶劣的工作环境。直升机是高度复杂的机、电、液一体化的复杂装备系统,内部零部件众多,振动传递路径复杂多样,内部零部件的制造与安装误差旋转后引起的微小振动也以干扰形式混合在信号中,使采集信号既有随机噪声也有特定干扰,信号背景更加复杂多变。因此,直升机行星传动轮系故障诊断方法既要在负载变化下保持诊断的性能,同时又要在噪声环境下具有较好的健壮性。
目前,迁移学习在机器学习领域得到广泛关注与研究,其中域适应方法致力于减少源域工况与目标域工况样本之间的特征分布差异,在变工况故障诊断中得到了成功应用。文献[8]提取模态分解信号的多维度特征,采用半监督迁移成分分析(Semisupervised Transfer Component Analysis, SSTCA)方法用于变工况的滚动轴承故障诊断。文献[9]采用稀疏自动编码器的特征提取以及半监督最大独立域适应(Semisupervised Maximum Independence Domain Adaptation, SSMIDA)相结合的深度迁移学习实现电机轴承的故障诊断。文献[10]基于一维原始振动信号,采用域对抗迁移网络(Domain Adversarial Neural Networks, DANN)对变工况下的滚动轴承进行故障诊断。
由于直升机主减速器部件繁多,结构紧凑复杂,部件之间振动相互耦合叠加影响,加之行星传动轮系本身独特的结构,采集的振动信号具有强烈的非线性与耦合调制特征,致使传统浅层学习方法很难实现高精度的故障诊断。与浅层学习机制相比,深度学习通过建立深度模型,映射输入信号与输出模式之间复杂的内在关系,可以找到更抽象、更高层次的特征表示,适用于大数据背景下的多元、非线性、高维数据分析。近年来,基于堆叠自编码器、深度信念网络以及卷积神经网络等深度学习模型的故障诊断方法已成功应用于转子、轴承与齿轮等机械部件的特征提取和故障模式识别。
因此,结合域对抗迁移模型变工况下的迁移能力以及深度学习模型的学习能力,本文提出了一种自适应域对抗深度迁移学习(Domain-adversarial Deep Transfer Learning, DDTL)的故障诊断方法,旨在解决直升机行星传动轮系故障诊断在变负载以及强噪声下的诊断难题,同时方法能根据工况变化自适应调整网络参数,获得优化的诊断模型,提高模型的域适配能力和故障诊断精度。
1 域对抗深度迁移学习模型
对于直升机行星传动轮系故障诊断,模型既要保证对行星传动轮系振动信号与故障模式之间复杂的映射关系具有很强的学习能力,又要保证在变负载和强噪声条件下具有较好的适应能力。因此,提出一种域对抗深度迁移学习(DDTL)网络模型,模型采用了具有良好抗噪性能的堆栈收缩自动编码深度学习网络(Stack Contractive Autoencoder Network,SCAE)对故障特征进行提取,并将已知工况下带标签训练样本作为源域,未知工况下无标签测试样本作为目标域进行域适应,采用域对抗机制实现不同负载之间的自适应迁移,减少不同负载之间样本数据分布的差异,提高模型的诊断能力与泛化能力。DDTL网络模型框架如图1所示。
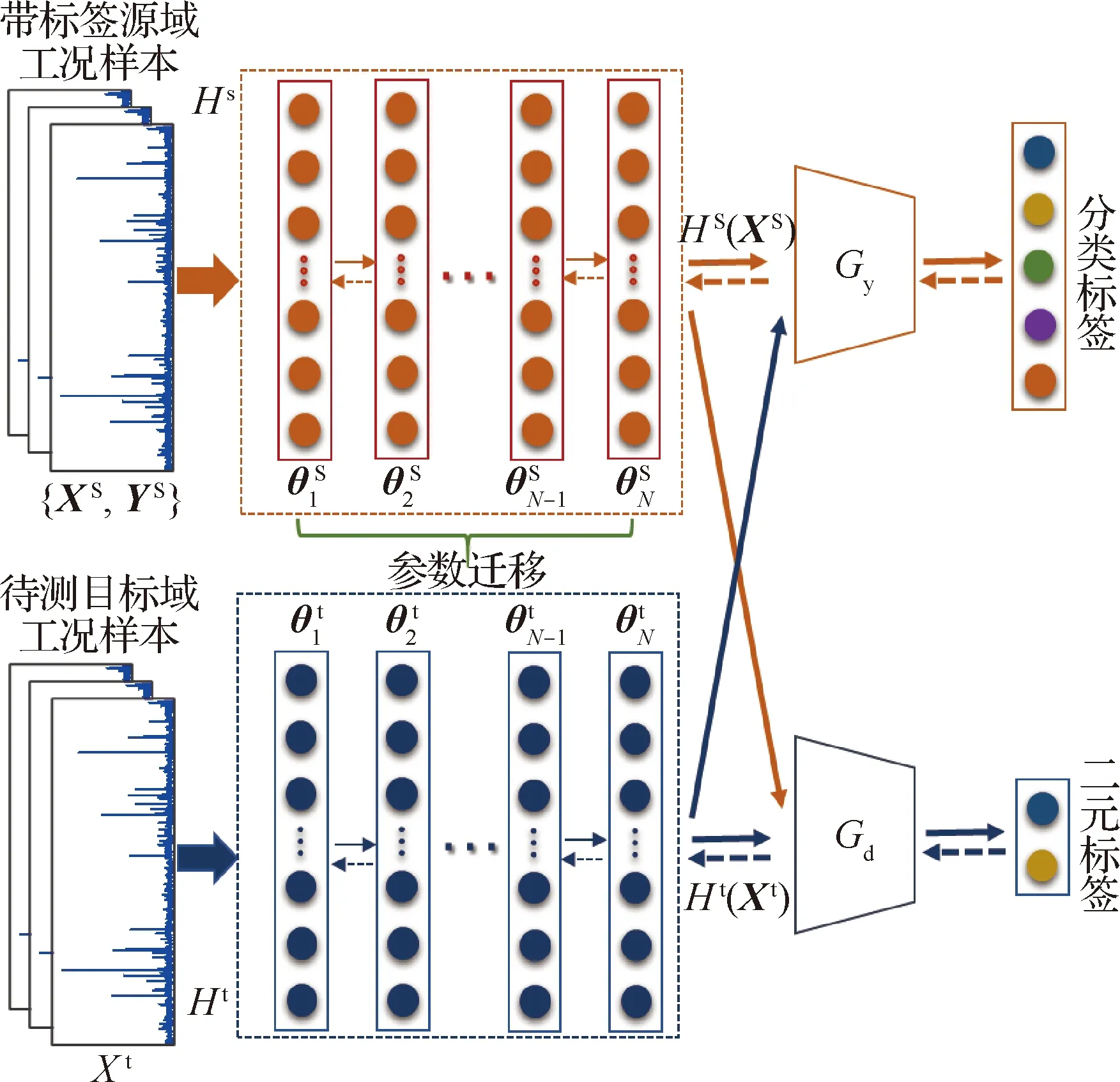
图1 DDTL网络模型Fig.1 Network model of DDTL
1.1 深度特征提取

源域深度特征提取网络采用sigmoid激活函数,输出表达式为
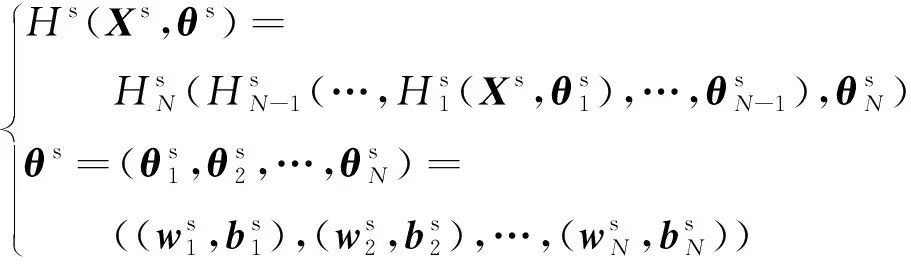
(1)
目标域深度特征提取网络输出表达式为
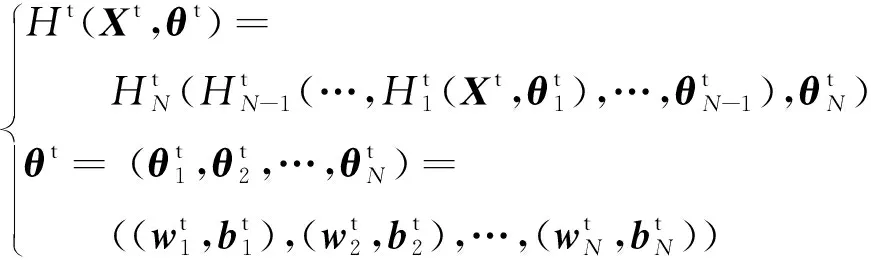
(2)
与DANN域对抗方法不同,DDTL的源域与目标域采用独立的深度特征提取网络,这样可以在工况变化时采用当前工况下无标签测试样本自适应对网络参数进行训练优化,在降低了模型复杂度的同时,提高了当源域与目标域数据分布差异较大时的迁移性能。
1.2 自适应参数迁移
在DDTL网络模型中,借助源域带标签样本可以训练得到深度特征提取模型。在源域与目标域样本数据分布一致的情况下,与可以共享网络权值实现目标域样本深度特征提取,但在与数据分布出现差异或者差异较大情况下,直接采用权值共享的对称映射会降低目标域深度特征的可迁移性。因此,DDTL将源域训练得到的网络参数迁移至目标域作为域适应的网络初始权值:
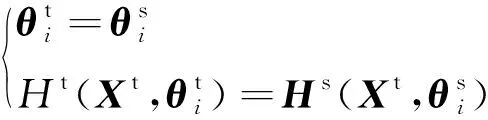
(3)
式中:=1,2,…,。
参数迁移后,采用目标域无标签测试样本对进行网络参数优化,以进一步减小源域与目标域之间的域偏移,提高了模型的稳定性以及对目标域样本的诊断性能。
1.3 域对抗训练优化
DDTL的训练优化分为两个阶段。在第一阶段用源域带标签样本训练和标签分类器,预测的损失函数最小化。在此阶段训练后和的网络参数保持固定。在第二阶段将参数迁移至后,采用目标域无标签样本对和域判别器进行对抗式的训练,不断优化迭代的网络参数。训练完成后,提取到了高质量的可迁移深度特征,消除了域之间的分布差异,就可以直接采用源域训练后的进行标签分类。
1)与的训练优化
DDTL的深度特征提取采用堆栈收缩自动编码网络,标签分类器采用softmax作为激活函数,可表达为
(();)=softmax(×()+)
(4)
与的有监督训练基于源域带标签样本集{,},目标函数采用标准的交叉熵损失函数:


(5)
通过随机梯度下降算法求解优化目标函数获得与的参数:

(6)
训练优化完成特征提取器和标签预测器后,将网络参数直接迁移至,并结合域判别器进行第二阶段对抗训练,以消除源域与目标域之间的域偏移,使提取的特征同样适应于标签预测器。
2)与的训练优化
对于域判别器采用sigmoid作为激活函数,其输出为二元标签,代表样本来自源域或目标域。结合生成对抗网络(Generative Adversarial Networks, GAN)的思想,与形成对抗竞争关系,相互交替训练,整个优化过程可以视为一个极大极小博弈问题,网络的损失函数为:

~[lg()+lg(1-())]
(7)
求解网络损失函数,分解为目标域特征提取器与域判别器目标函数:

-~[lg(())]
-~[lg(1-(()))]
(8)

-~[lg(())]
(9)
通过最小化目标函数来更新标签预测器的参数,最大化目标函数来更新域判别器的参数:

(10)

(11)
2 基于DDTL的故障诊断方法
采用DDTL进行直升机行星传动轮系故障诊断的方法流程如图2所示。具体步骤如下:
1) 样本预处理
根据行星齿轮箱振动模型,齿轮局部故障主要引起频谱数据中齿轮啮合频率及谐波的边带分布的变化,而且相比于时域信号,频域信号在变负载情况具有更优的诊断准确率,因此对采集的时域样本数据进行信号分解,提取故障敏感信号后进行频域变换,经过归一化处理后,作为样本集。将已知负载下正常与故障样本组合成为训练样本集(源域,带样本标签),将未知负载下的测试样本组合作为测试样本集(目标域,无样本标签)。
2) 参数初始化
采用堆栈收缩自动编码器SCAE的网络结构,网络输出层采用softmax作为激活函数进行的标签预测。设置SCAE初始网络参数,包括隐含层层数和层节点数,随机初始化连接参数,即权重、偏差以及正则化项。
3)与训练
采用训练样本集(不带标签)逐层贪婪训练的SCAE网络模型;采用训练样本集(带标签)基于无监督训练后的SCAE网络模型进行源域特征提取并输入至,进行的训练,并基于误差反向传播完成网络模型的有监督微调。
4) 参数迁移
采用堆栈收缩自动编码器SCAE的网络结构,网络输出层采用sigmoid作为激活函数进行的域判别。采用第1阶段训练完成的参数初始化。
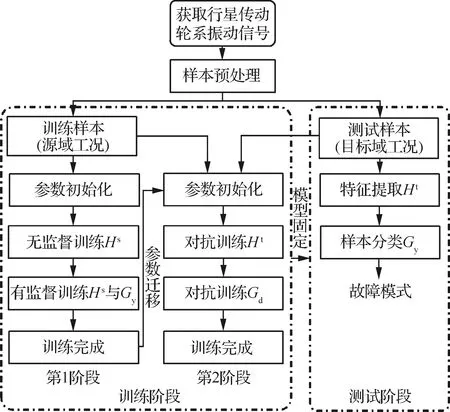
图2 故障诊断流程Fig.2 Diagram of whole fault diagnosis process
5) 对抗训练
采用源域与目标域样本分别对、进行训练,提取域特征输入至进行域判别,并基于对抗学习方式,不断交替优化与。
6) 测试阶段
采用源域训练后的对目标域样本经提取的深度特征进行测试,输出样本故障模式,完成故障诊断。
3 实验验证
3.1 实验设置
在直升机行星传动仿真实验台对方法进行验证,如图3所示,主要由变速驱动电机、可编程控制面板、2级行星齿轮箱、平行轴齿轮箱、可编程磁力制动器、加速度传感器等构成。
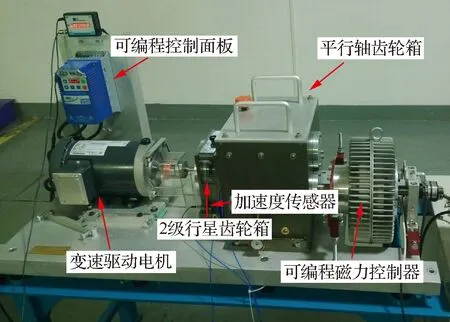
图3 直升机行星传动仿真实验台Fig.3 Helicopter planetary gearboxes transmission platform
实验设置了4种齿轮故障模式:磨损、裂纹、切齿和断齿,如图4所示。在行星齿轮箱外部安装加速度传感器检测振动信号,采样频率为10 kHz。

图4 行星齿轮箱中典型故障模式部件Fig.4 Typical faulty components of planetary gearboxes
为模拟直升机传动轮系转速微弱波动与负载大范围变化的实际工作状态,实验在正常与故障情况下设置了4种变负载工况,各工况下样本配置情况如表1所示。
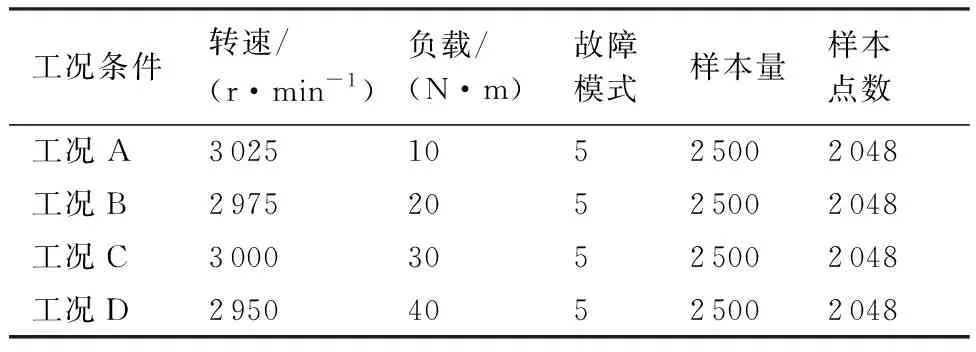
表1 不同工况下的样本配置
为了验证方法的优越性,采用无对抗迁移的SCAE网络作为基线方法,其他对比方法包括:常规域适应方法SSTCA、SSMIDA以及基于对抗域适应方法DANN。方法采用多层感知器(MLP)进行特征提取,DANN同样采用MLP作为标签预测器和域判别器,采用Adam优化器用于网络训练。网络结构为1000-250-5,其他超参数预设范围内进行随机搜索,详见表2,并选择最优设置下的结果作为实验结果。
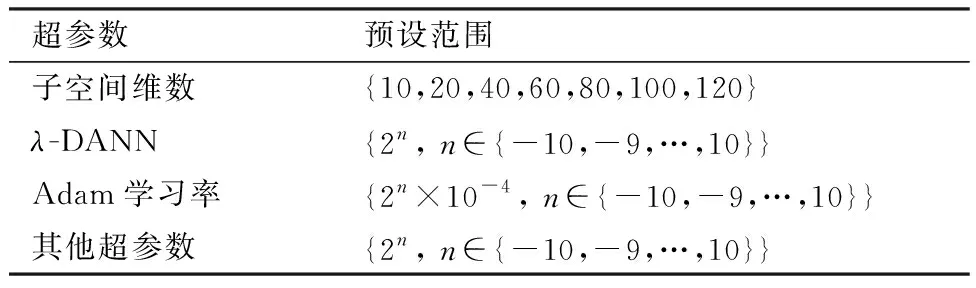
表2 超参数预设范围Table 2 Value sets for hyperparameter tuning
3.2 特征可视化分析
为了体现域适应方法对特征分布的影响,选取工况A/D(源域/目标域)的迁移任务采用t-SNE 对特征进行可视化分析,实验结果如图5所示。
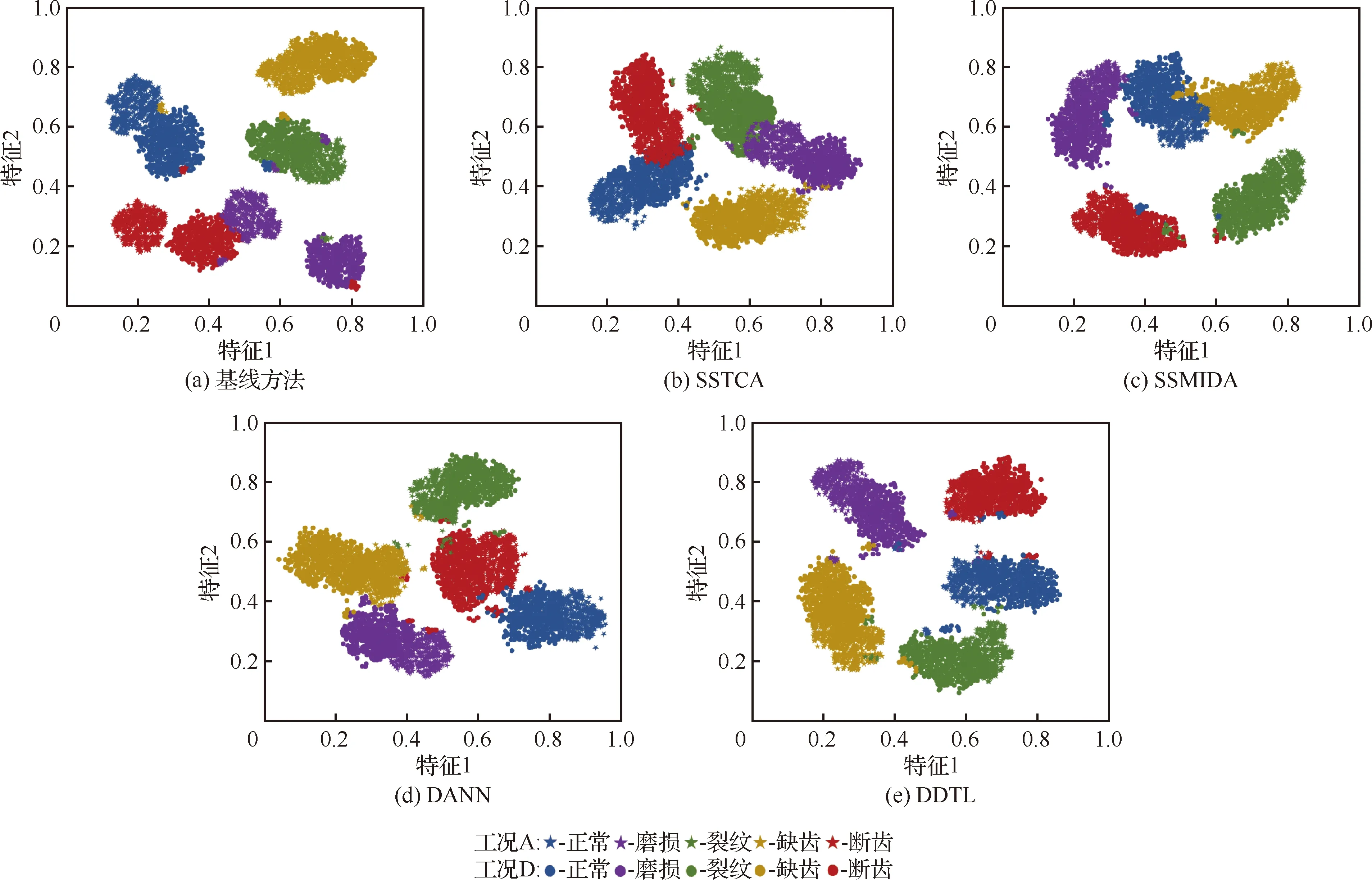
图5 特征可视化分析Fig.5 Feature visualization analysis
从图中可见,基线方法采用SCAE网络在单一工况下能明显区分出故障模式,但不同工况下相同故障模式分散在不同区域,表明其在处理变工况条件下的局限性。与基线方法相比,域适应方法对样本特征进行映射处理后,两种工况下的样本特征分布出现不同程度的接近,体现出域适应的效果。相比于其他方法,DDTL在特征空间中分布的一致性更优,不同故障模式样本能彼此完全分开,而不同工况下相同故障模式样本能完全聚集,体现了其优异的特征迁移能力与模式识别能力。
3.3 方法诊断性能分析
从样本集中选取单工况-单工况、多工况-单工况以及多工况-多工况三种迁移情况进行对比分析。实验将源域单/多工况下带标签样本作为训练样本,将目标域工况不带标签样本随机抽取一半样本作为训练样本,另一半样本作为测试样本。实验重复5次,诊断准确率的平均值与标准差如表3所示。
从表3中可以看出,面对不同工况下样本特征分布的差异,基线方法在5种迁移任务中诊断性能最差,平均准确率约为66.8%。SSTCA与SSMIDA通过特征迁移后诊断准确率比基线方法分别提高了8.3%与11.4%,但仍低于采用深度迁移方法的DANN与DDTL。DANN与DDTL结合了深度学习与域对抗进行特征提取与迁移,但DANN采用域间共享特征提取器,在面对样本特征分布差异较大情况时,网络优化往往更为困难,比如在B/D迁移任务结果为88.6%,比DDTL低了7.2%。在以上5种方法中,DDTL获得了最优的诊断性能,平均诊断准确率约为97.6%,而且也最为稳定,泛化性能最优,表明方法采用独立的域间特征提取器能更好适应目标域样本特征分布的变化,通过堆栈自动编码器深度学习网络能更好提取高质量特征,基于域对抗也能更好消除域间特征分布差异,实现高性能的故障诊断。

表3 诊断准确率结果Table 3 Results of diagnostic accuracy
除了准确率,衡量诊断性能的两个关键指标是故障漏警率(Missing Alarm Rate, MR)与故障虚警率(False Alarm rate, FR)。行星传动轮系是直升机的核心部件,没有冗余和备份,漏警会导致事故发生,虚警会降低使用维护效率,因此,对于直升机故障诊断,MR与FR越低越好。MR与FR的实验结果如图6所示。

图6 MR与FR的实验结果Fig.6 Results of MR and FR
从图中可以看出,整体趋势与诊断准确率相类似,基线方法在MR与FR上的整体表现要弱于其他域适应方法,说明域适应采用迁移方式更能适应工况变化引起的数据分布差异对诊断性能的影响。在域适应方法中,结合深度特征提取与域对抗特征迁移的DDAN与DDTL明显优于SSTCA与SSMIDA,而所提DDTL方法的MR与FR的平均值与标准差上均是最优,进一步表明了方法在诊断性能与泛化能力上的优越性。
3.4 方法健壮性分析
为了模拟直升机行星传动轮系在噪声条件下的运行环境,以B/D的迁移任务为例,实验结果如图7所示。
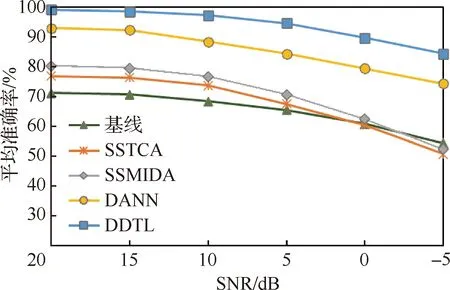
图7 不同信噪比下的实验结果Fig.7 Results under different SNRs
在外场环境下通过直升机健康监测系统安装的加速度传感器在线采集背景噪声信号,将其加入实验平台采集的振动信号中,以模拟真实场景下噪声环境,验证方法在噪声环境变化下的健壮性。随着信噪比(Signal-noise Ratio, SNR)的降低,噪声导致样本数据出现一定程度波动,从而引起源域与目标域样本特征分布之间差异变大,五种方法在特征提取与特征迁移方面的抗噪能力的差异导致诊断性能出现不同程度的下降。从图中可见,基线方法的平均准确率下降幅度小于传统域适应方法SSTCA与SSMIDA,而且在-5 dB的准确率已超过SSTCA,说明相比于传统时频域特征,基线方法基于SCAE提取的深度特征在抗噪性能上更优。相比较而言,DDAN的噪声健壮性优于传统域适应方法,下降幅度更小,体现了结合了深度学习与域对抗特征迁移的优越性。
从图中可见,所有方法中DDTL的噪声健壮性最优,在信噪比最小情况下仍保持较高的诊断准确率。这是因为方法采用的SCAE网络添加了显式正则项,使特征提取函数能抵抗输入扰动,并通过深层学习把握了数据的流形结构,在信噪比变化情况下依然维持较高的性能。另外,方法通过特征提取器与域判别器的对抗学习,进一步增强了SCAE模型的稳定性,挖掘出更具鲁棒性的状态特征,获得更优异的诊断性能。
4 结 论
1) 提出了一种结合深度学习模型与域对抗适配框架的域对抗深度迁移学习方法。方法采用具有良好抗噪性能的堆栈收缩自动编码深度学习网络对故障特征进行提取,源域与目标域采用独立的特征提取器,提高对目标域样本分布的适应能力,并基于域对抗机制实现特征迁移,提高了模型的诊断能力与泛化能力。
2) 提出了基于DDTL的直升机行星传动轮系故障诊断方法,方法充分利用DDTL在深度学习模型的学习能力以及域对抗迁移模型变工况下的迁移能力,满足了在变工况与强噪声等复杂工况下的故障诊断要求。
3) 所提方法性能与基线方法以及其他域适应方法在直升机行星传动仿真实验平台上进行了对比分析,验证了方法在复杂工况下故障诊断的优异性能与健壮性。
