一个双层城市快速路匝道联合控制模型系统仿真研究
2022-09-06张丽岩校鹏程
张丽岩,校鹏程,马 健,葛 静
(苏州科技大学 土木工程学院,江苏 苏州 215011)
0 引言
经济的持续发展推动了交通行业的高速成长,机动车保有量和城市交通需求的明显增长也衍生出了各种交通问题,其中快速路的堵塞尤为严重。快速路交通控制有多种方式,其中匝道控制(Ramp Metering,RM)和可变限速控制(Variable Speed Limit,VSL)是两个重要组成部分,目前获得应用最多的是快速路主线VSL 和RM 的协同控制,但是由于存在一些现实的问题往往导致这些控制策略的应用收效甚微。
车路协同技术的兴起与发展为解决城市快速路匝道控制问题提供了新的思路,在车路协同环境下,车与车、车与路侧设施之间皆可利用无线通信技术完成信息交换,这有助于管理者实时获取精确的道路状况和实现对车辆的精准控制。
本文选取了城市快速路匝道这一场景,对双层城市快速路匝道联合控制模型系统的框架进行了设计,并通过交通仿真来模拟双层城市快速路并分析所提出的控制策略在应用时可取得的效果,为后续的研究提供基础。
1 快速路匝道联合控制模型系统
1.1 系统框架。本文构建了双层城市快速路匝道联合控制模型系统的基本框架,框架整体可分为路径决策系统和快速路匝道控制系统,路径决策系统包括交通信息采集子系统和车辆路径决策子系统,快速路匝道控制系统包括主线、入口匝道和车辆控制子系统。借助计算各个可选路径的实时阻抗,车辆路径决策子系统为车辆是否选择快速路行驶提供依据。快速路匝道控制系统联合主线上游可变限速引导和入口匝道控制消除主线交通瓶颈,提升下游通行效率。
1.2 路径决策系统。路径决策系统设计如图1 所示。该系统共包含两条可选路径,辅路车辆到达决策点即启动路径决策控制,路径1 为选择进入快速路,包含上下匝道和主线,路径2 为选择继续在辅路行驶。本文将路径选择的标准设定为最短行程时间,辅路控制中心通过处理和计算实时获取的交通信息,计算出可选路径的权值,并通过通信设备将结果反馈至车辆。

图1 路径决策系统构成图
1.3 快速路匝道控制系统。提出双层城市快速路匝道控制模型系统,控制系统结构如图2 所示,由主线、入口匝道以及车辆控制子系统组成。

图2 双层城市快速路匝道控制模型系统示意图
(1)主线控制子系统。快速路主线控制子系统的控制目标是对主线上游车辆实施VSL,缓解快速路瓶颈,系统组成包括主线路侧单元RSU,匝道RSU,车载设备以及交通信息管理控制中心等。主线及匝道RSU 的作用是获取控制区域各处的实时交通状态信息,同时利用车载设备得到车辆的行驶数据信息,并将这些信息实时传输至控制中心。
(2)入口匝道控制子系统。入口匝道控制子系统的控制目标是在控制周期内约束汇入快速路的车辆数,减少合流区交通延误,系统组成有主线、入口匝道RSU,入口匝道排队检测器,入口匝道及交通信息管理控制中心等。
(3)控制车辆子系统。控制区域内的自动驾驶车辆CAV(Connected Automated Vehicle)均配置了车载单元OBU(On Board Unit),主要功能是和路侧RSU 通信。车载单元OBU 包含三个模块,其功能分别是数据采集、实时通信以及车辆控制。
2 实例验证及仿真分析
2.1 仿真平台的构建。仿真路网来自苏州市中环高架快速路,其中双层城市快速路为娄江快速路(星明街立交—星港街立交)与娄江大道(娄门路—星港路)。该快速路段主线全长约2km,为单向三车道,在入口匝道处拓宽为四车道,后变为单向三车道,车道宽度为3.5m。城市道路娄江大道为城市主干道,单向三车道,车道宽度为3.25m,设定A 为路径决策点,可选路径1为:A—B—C—D,其中B 为快速路匝道合流点,路径2 为:A—D,中间有一T 型信号控制交叉口(娄江大道—扬明路)。当车辆驶至A 点时,辅路控制中心路径决策系统根据实时道路及车辆状态信息,计算出两条路径的实时阻抗,然后通过通信设备发送至车辆,车辆接收到控制指令后调整自身驾驶行为,并默认驾驶员会选择阻抗最小的路径。仿真平台的基本架构如图3 所示。
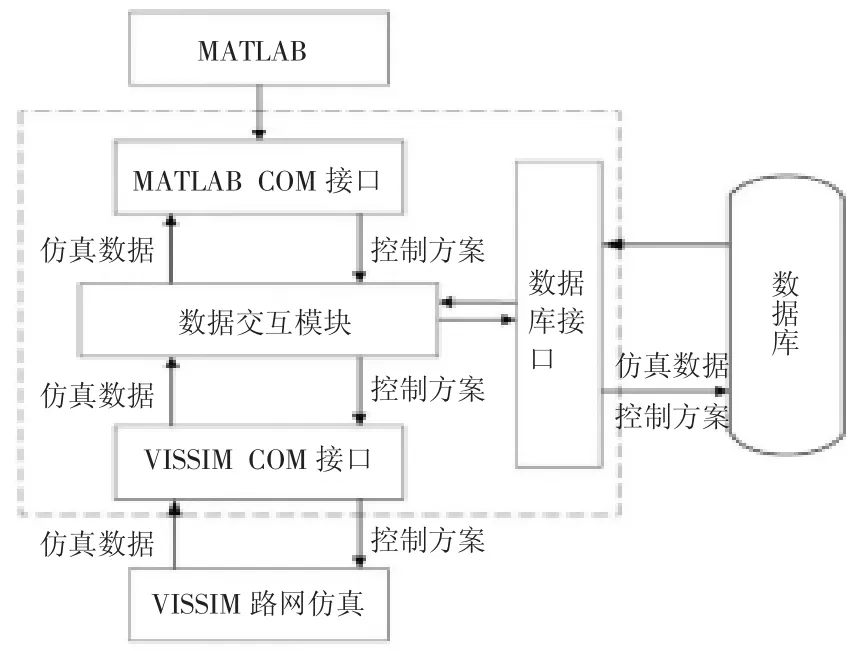
图3 仿真平台结构示意图
2.2 参数标定
2.2.1 VISSIM 仿真参数标定。对跟驰模型的参数进行调整,包括平均停车间距(CC0)、期望车头时距(CC1)、跟驰随机震荡距离(CC2)等。同时也对VISSIM 中车辆换道模型的最大减速度、可接受的减速度等部分参数进行了调整,具体如图4 所示。

图4 模型参数标定
将快速路主线和城市道路实际的交通量检测数据作为原始输入数据分时段输入仿真路网,并以此为基础建立仿真模型。车辆构成以小汽车为主,快速路主线与辅路城市道路的车辆组成比例,具体比例:主路上小汽车的占比为0.8,大型货车为0.1,公共汽车为0.1;辅路上小汽车的占比为0.7,大型货车为0.1,公共汽车为0.2。在VISSIM 中根据实际交通设定路网车辆原始的决策路径,设城市快速路编号为1,城市道路编号为2,则本文的路径设置为1-1、1-2 的车流比为7:3,2-1、2-1-2、2-2的车流比为4:3:3。
路径决策设置完成之后,需进行冲突区设置,结合城市快速路交通流的运行现状,确定主线和匝道期望车速的取值,其中主线期望速度值的最大值与最小值分别为70km/h 和50km/h,而匝道期望速度值的最大值与最小值分别为45km/h 与20km/h。城市道路存在一个T 型交叉口,其控制周期为90s,具体相位设计和信号配时为东西直行35s,东西左转20s,北左转20s。
2.2.2 模型参数标定。根据改进路阻模型标定结果所得模型参数,进行参数回归计算,得出路径1 和路径2 的改进路阻模型,各路径阻抗T 如式(1)、式(2)所示。

式中:φ 是根据不同饱和度划分的路段交通流状态;q、q分别表示入口匝道车辆汇入前后的合流区交通量,veh/h;T 为交叉口信号周期时长;λ 为交叉口信号灯绿信比;q 为进入交叉口的车流量;c 为交叉口饱和度。
2.3 交通流仿真模型有效性验证。根据路段特点,选取快速路主线路段2 为对象,对比在交通量相同情况下,仿真时间内各时刻路段速度和密度的实际值和预测结果,并用图像表示,如图5 所示。
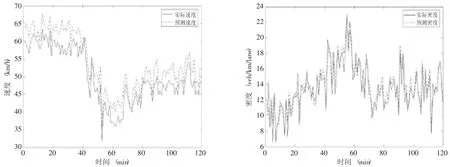
图5 路段2 速度、密度预测结果对比
可以得出,研究路段2 的预测密度值与实际密度值基本保持一致,速度预测值整体上比实际值高7.68%,但是其变化趋势与实际速度值的变化非常接近,模拟效果较好。改进后的交通流模型的平均绝对百分比误差值为9.3%,因此可得出标定后的改进路阻模型具有良好的适用性。
2.4 不同控制策略下的仿真结果对比分析。选取总行程时间、主线车辆行程时间、平均延误时间以及相邻路段间的速度差作为评价指标。分别对比无控制、仅采用快速路匝道控制策略以及采用改进阻抗模型进行路径决策控制和快速路匝道控制策略的运行效率和安全性,分析结果如表1 所示。

表1 不同控制策略下评价指标比较
由表1 可知,相较于无控制情况,采用快速路匝道控制策略后,总行程时间、主线车流行程时间、平均延误以及速度差都得到了降低。而加上路径决策控制后,路网在运行效率以及安全性方面都获得了更大的提升,尤其是路网平均延误时间,相较于无控制情景减少了32.48%,以及相邻路段间的速度差减小了34.44%。
3 结论与展望
本文构建了双层城市快速路匝道联合控制模型系统,包括路径决策系统和快速路匝道控制系统,分别介绍了各系统的工作原理及控制方法,并通过仿真验证其可靠性。今后有望添加天气、事故等因素进一步完善路径决策模型的构建,同时在下一步研究中,会采用更为微观的模型来模拟城市交通驾驶行为。
