基于车辆动力学模型的动态质量测试方法在非公路宽体车上的应用
2022-09-06任宏亮
任宏亮
西安主函数智能科技有限公司 陕西省西安市 712000
1 前言
随着智能化信息化技术的日趋成熟,无人驾驶技术在各个行业得到应用,作为矿区运输主力产品的非公路宽体自卸车由于其行驶环境封闭,作业任务单一逐渐的被许多无人驾驶科技公司作为首选落地的产品,非公路宽体自卸车作为运输设备其无人驾驶的重要意义在于人工智能加持下优于人工驾驶的经济性指标,非公路宽体自卸车的经济性指标包括两个方面,其一是运能,其二是油耗,人工智能代替有人驾驶的控制算法是建立在车辆地面力学及车辆动力学模型的基础上运用现代控制算法对车辆的油门加以控制,而作为控制算法的基础,地面力学模型和车辆动力学模型都离不开车辆质量这个重要参数,车辆质量参数对于控制算法至关重要。
2 现有车辆质量获取方法
目前获取车辆质量的方法有离线和在线两种,离线方法主要是通过传统的地磅进行称重;在线称重方法主要有两种,其一是通过车辆自卸车举升系统根据杠杆原理获取质量,此种方法由于货箱装载不均衡导致测量误差较大,;在线称重的另外一种方法就是通过轮胎胎压来计算车辆重量,由于轮胎胎压受温度影响极大,所以误差也较大。
3 基于车辆动力学模型的动态质量检测算法
3.1 算法基本原理
本算法是要计算车辆的总质量,根据牛顿第二定律可得质量、力、加速度的关系如下所示:

F 为车辆受到的合力,M 为汽车总质量,a 为车辆加速度
根据汽车理论车辆动力及阻力分析可得知车辆所受合力如下所示:

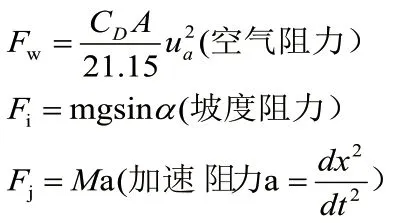
其中:

m:车辆静态质量 J:车辆总的转动惯量
r:轮胎滚动半径 R:轮胎测量半径
T:驱动功率 i:变速箱传动比
i:驱动桥传动比 η:传动系总效率
g:重力加速度 α:坡度
f:滚动阻力 C:空气阻力
A:迎风面积 u:车速
根据以上可推导出动态质量计算公式:
3.2 基本参数获取及过程量计算
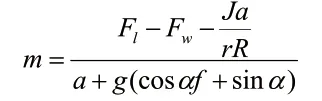
本次测试采用同力重工出产的无人驾驶线控车辆TLI65,其基本参数如下表1:
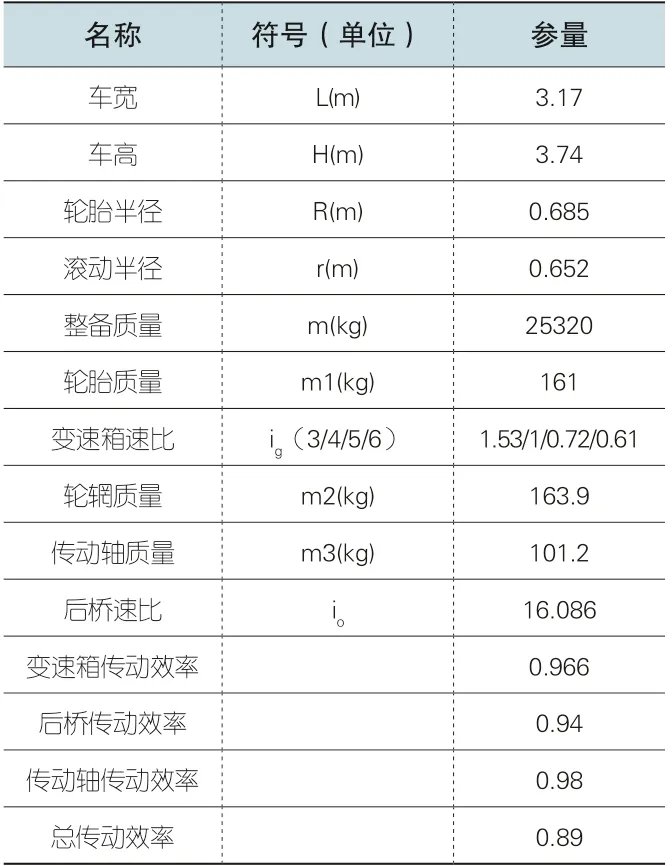
表1
本次测试采用同力重工出产的无人驾驶线控车辆TLI65,其基本参数如表2 所示:
表2
从上面的计算可以看出半径较小的棒状零部件(半轴/惯通轴/传动轴/变速箱传动轴等)的转动惯量几乎可以忽略不记,车辆旋转动态质量占整备质量的4.7%;

变速箱在1/2 挡时处于变扭状态,对外输出及计算的驱动力不可靠,所以驱动力计算及称重系统质量的计算仅在3/4/5/6 挡;
动力系统的内耗:发动机对外发出的驱动力没有扣除发动机附件(风扇/发电机/油泵/打气泵/机油泵/转向泵/空调压缩机等)消耗的功率,但是从发动机对外输出的摩擦损耗数据可以看出是由发动机生厂商根据台架上测试数据写入的的几个阶梯固定值,和实际值有一定的误差,所以发动机的内耗取空挡状态下各转速下的驱动力,由于没有阻力所以驱动力基本上等于内部消耗的功率,这组曲线作为参数直接标定到计算当中去,发动机内耗曲线如图1 所示:
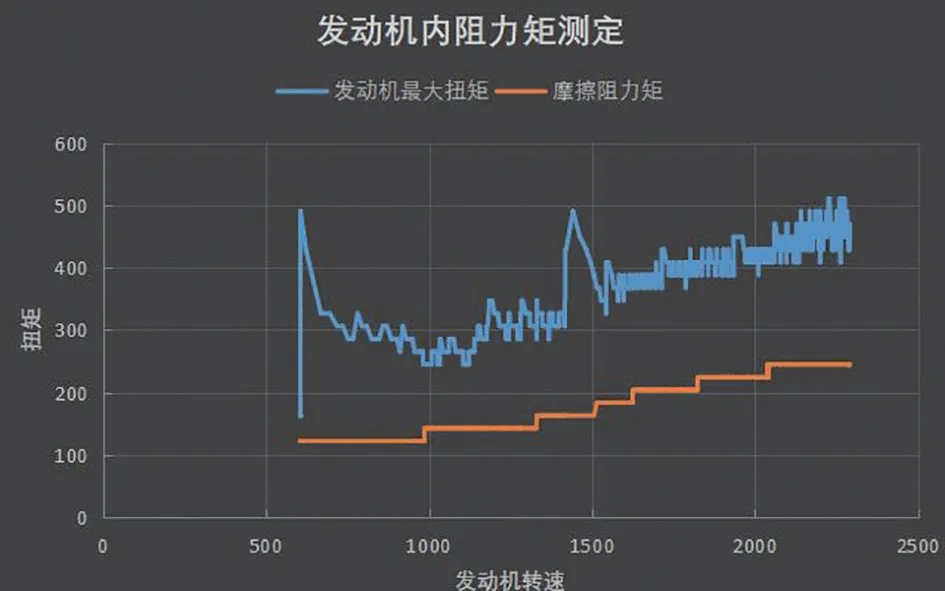
图1
转向泵的输出功率会随着系统油压的变化而变化,而且转向泵消耗功率附件消耗功率中占比较大不能忽略,所以称重系统的计算仅取直路行驶(航向或者方向盘转角在零位附近不变时)
3.3 测试平台及软硬件架构设计
基于已有无人驾驶线控底盘、惯性测量元件IMU 及无人驾驶计算平台可搭建此次试验平台,平台如图2 所示:

图2
其中线控底盘与计算平台通过can 总线相连接,计算平台可通过线控底盘获取发动机、变速箱及车辆运行的基本参数,惯性测量元件IMU 与计算平台通过串口连接,计算平台通过惯性元件IMU 可获取车辆行驶方向的加速度及速度信息,计算平台通过以上数据完成实时在线车辆质量计算
计算平台属于常规的工控机,该工控机安装了ubantu16.04 系统,动态质量计算系统程序运行在ubantu16.04 系统之上,计算的数据流及逻辑图如图3 所示:
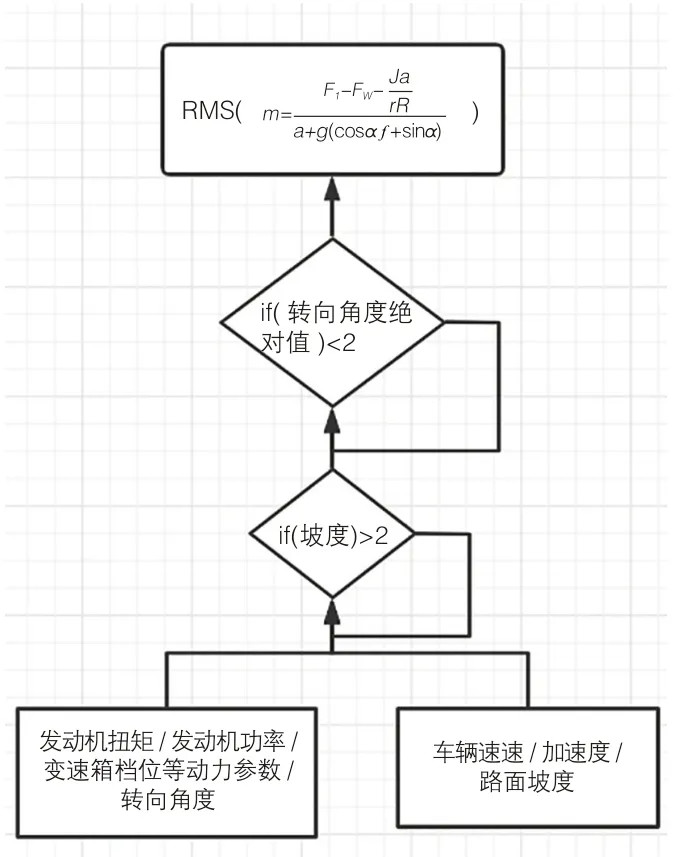
图3
首先过滤下坡和转向角度大于2 度的数据,根据计算公式获取实时的质量信息,在此基础上需要使用滤波算法滤除加速度和速度异常的数据,将以上有效数据实时求均方根,可得到实时的质量数据,图4 是专门设计的实时调试观测界面。
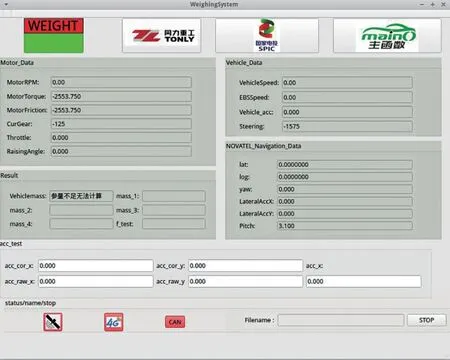
图4
4 测试结果及数据分析
4.1 测试过程
测试场地说明:
测试过程使用露天煤矿外排工况,选取从装料区(海波875 米)到卸料区(海拔1020 米)的道路来作为测试路段,路径全长2.5km,全程拔高145 米;
测试过程说明
①首先使用地磅精确测量空载车辆重量,从装料区行驶至卸料区,全程测试5 次,记录数据;
②在装料区使用2.5 方的挖机装料至满载,使用地磅精确测量满载质量,从装料区行驶至卸料区,全程测试5 次,记录数据;
③在装料区使用2.5 方的挖机装料至半载,使用地磅精确测量满载质量,从装料区行驶至卸料区,全程测试5 次,记录数据;
4.2 测试数据分析
①空载测试数据分析及过程数据
表3 中测试结果取均方根的平均值,通过以上数据可得空载测试数据误差在-1.5%~5.5%之间,根据图1-5 数据可知由于起步阶段阻力较大,所以计算数据波动较大,随着测试数据的逐渐积累测试结果逐渐逼近实际数据,且随着车辆行驶时间越长数据误差越小,400 秒后数据已经进入±5%范围内了。

表3
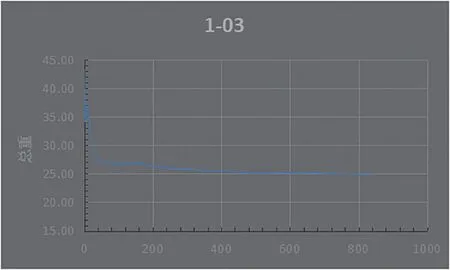
图5
②满载测试数据分析及过程数据
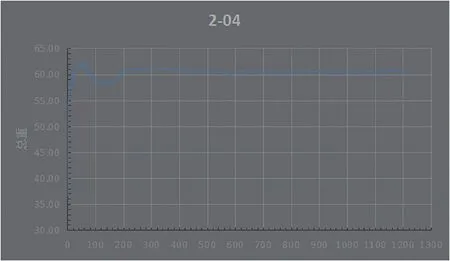
图6
由表4 数据可得满载测试数据误差在-3.1%~4.8%,如图1-6 数据可知满载数据收敛比空载要快,由于发动机动力部分的输出较大,路面阻力所占比例逐渐减小,所以数据在200 秒后的误差已经在±5%范围内了。

表4

表5
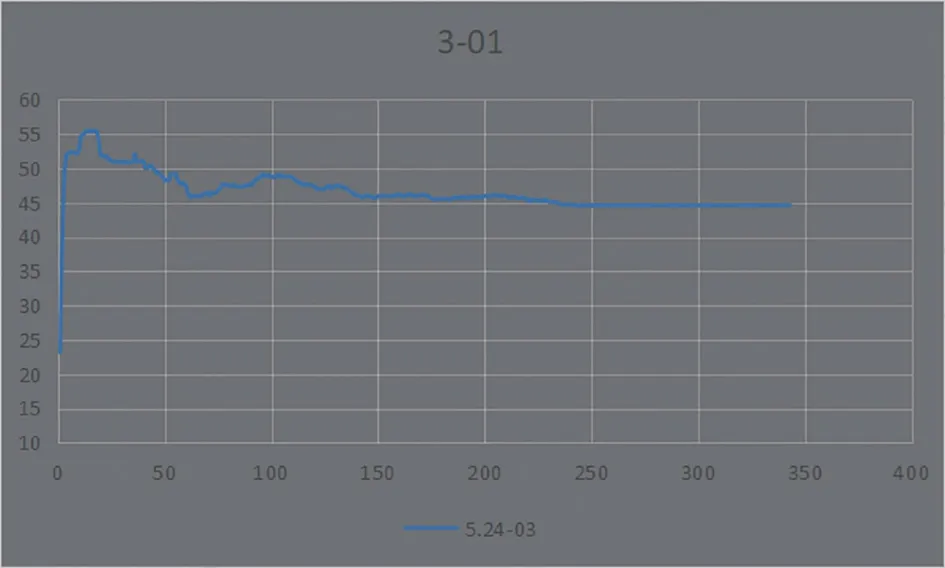
图7
③半载测试数据分析及过程数据
由表1-5 数据可得半载测试数据误差在-2.73%~4.59%,从如1-7 数据可知数据在200 秒后的误差已经在±5%范围内了。
5 结论
本文研究了非铺装道路情况下非公路宽体车的动态质量测定问题,提出了基于车辆动力学模型的动态质量测试方法,首先建立了精确的车辆动力学模型及地面力学模型,其次利用现有非公路宽体自卸车无人驾驶平台搭建了测试软硬件环境,针对测试过程的数据,先是精确标定发动机的净输出功率,剔除转向系统消耗的功率误差,只选取直线行驶的数据,最后针对所有异常数据做了过滤取均方根值作为最后的计算结果,通过对比试验及数据分析可知该方法有效且可行。
针对非道路环境的动态质量检测具有很大的现实意义,对于无人驾驶车辆经济性控制算法具有决定性作用,所以动态质量的测试方法是我们未来继续研究和探索的方向。
