轨道作业车周边异物侵线监测技术
2022-09-05尹成斐刘尚昆张世红宋晓阳刘传
尹成斐 刘尚昆 张世红 宋晓阳 刘传
1.国能朔黄铁路发展有限责任公司,河北肃宁 062350;2.中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081
轨道作业车在线路上维修作业时,现场施工配合人员较多,且人员跨线流动性强[1]。现场作业任务繁重时,人员容易倦怠疏忽,易出现施工人员侵入本线或邻线铁路限界的情况,极易造成人员安全事故。另外,一些既有线沿线周边环境复杂,轨道作业车的作业机构可能与沿线铁路设备或其他侵线物体发生碰撞,存在极大安全隐患[2]。
轨道作业车施工安全管理过程中,主要在司机室人工监控[3]。通过在轨道作业车前后安装摄像头,在轨道作业车司机室安装显示终端,显示轨道作业车周边环境视频图像,由司机对周边环境风险进行人工识别,从而做出相应操作[4]。这种方式受司机主观因素影响较大,存在安全风险。
线路维修安全关系到铁路线路的运营安全,迫切需要自动化程度更高、安全性和稳定性更好的施工安全系统,确保铁路运营线路设备的安全[5]。因此,急需开发相应的智能化轨道作业车周边异物侵线监测系统,提高作业安全性。
针对铁路沿线异物侵线监测的问题,国内外主要使用超声波技术、毫米波雷达技术、机器视觉技术和激光雷达技术[6]。本文选用激光雷达传感器进行环境感知,对三维点云的处理、异物识别与定位技术开展研究;开发数据处理软件,实现铁路沿线异物的识别和准确定位,从而实现轨道作业车周边异物在线监测的功能。
1 总体技术方案
轨道作业车周边异物侵线监测系统总体方案如图1所示。该系统主要包括安装在轨道作业车辆前后端的激光雷达、毫米波雷达、声光报警器、测控箱、工控主机等。
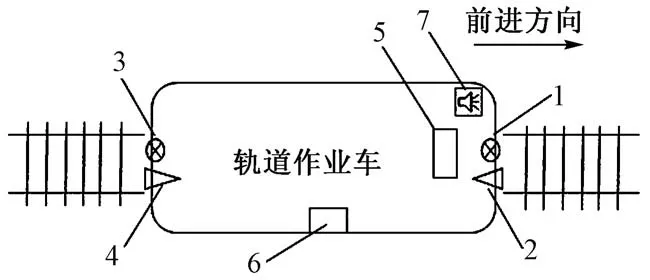
图1 轨道作业车周边异物侵线检测系统总体方案
激光雷达在夜间可以正常工作,且能适应雾天、雨天等恶劣天气,软硬件成本相对较低,适用于工务作业中的侵线异物识别。
该方案中,激光雷达用于获取空间三维点云数据,通过百兆以太网口与工控机连接,将采集到的点云数据实时传输到工控机。工控机运行编写的软件程序将侵线异物识别并定位,毫米波雷达用于对激光雷达感知结果进行二次确认。
1.1 技术指标
1)识别范围5~20 m;
2)异物定位误差不大于200 mm;
3)轨道作业车运行速度不大于10 km/h。
1.2 异物识别与定位
异物识别及定位流程如图2所示。
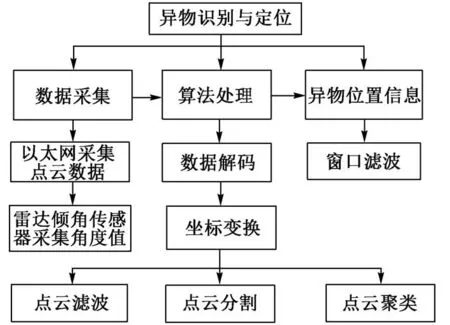
图2 异物识别及定位流程
通过百兆以太网将激光雷达采集的球坐标系下的点云数据发送到工控机,从雷达姿态传感器中得到雷达的侧滚角和俯仰角,在软件中对雷达点云数据进行坐标变换和修正,得到基于指定视角的直角坐标系下的点云数据。
激光雷达每帧的点云数据量大,处理时间长。因此,采用点云滤波对点云数据进行预处理,减少噪声点和离群点,并划分得到感兴趣区域。在感兴趣区域中,分割出铁路道床,然后采用欧氏聚类法对分割出的点云进行聚类,得到异物点云簇。对点云簇数据做窗口滤波得到异物的位置信息。
2 关键算法
2.1 点云滤波算法
滤波算法流程如图3所示。在处理点云数据过程中,因为实时点云数据量大,加之受到外界干扰如视线遮挡、传感器抖动等原因,点云数据中往往存在着一些离散点和噪声点。因此,在点云数据的处理中,滤波作为预处理的第一步,对后续处理的步骤影响很大,必须针对实际应用场景分析点云数据中噪声类型,进行有效滤波,才能保证后续的聚类和特征提取的正确性。

图3 滤波算法流程
2.2 点云聚类算法
聚类的方法主要包括DBSCAN算法、K-means聚类算法、欧氏聚类算法、利用深度图像进行聚类分析等[7]。DBSCAN算法是基于密度的数据聚类算法,能够快速对任意形状点云进行聚类,但该法内存资源消耗大,对处理器要求很高。K-means聚类算法准确率高,但需要手动输入聚类数目k,难以达到实时性要求[8]。欧氏聚类算法对大多数据具有通用性,点云分割的效果与实时性良好[9]。综上本文结合现场点云数据特点,采取欧氏聚类法进行异物的识别,其算法流程如图4所示。
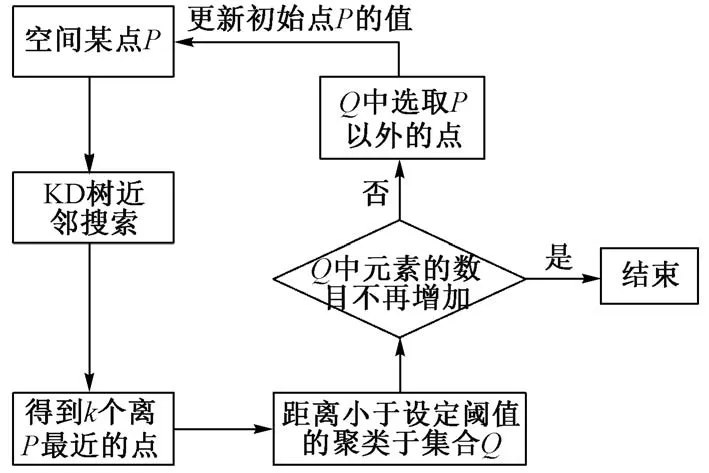
图4 欧氏聚类算法流程
3 现场试验
在轨道作业车端部安装激光雷达传感器,在轨道作业车端部下方安装毫米波雷达,对侵入铁路限界的异物进行扫描。试验现场和界面显示如图5所示。
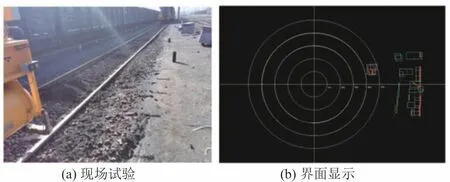
图5 试验现场与界面显示
激光雷达将实时扫描到的三维点云数据通过以太网传输至工控机,经过滤波、聚类后,识别出侵入铁路限界的异物并得到其位置信息,在工控机软件界面上用方框圈出;同时毫米波雷达对扫描出的异物进行二次确认,在界面上用圆框圈出距离轨道作业车最近的异物。
在线路上进行多次试验得到异物监测定位误差,见表1。可知,异物监测定位精度满足误差不大于200 mm的要求。

表1 异物监测定位精度
4 结语
针对轨道作业车施工作业时车辆周边施工配合人员众多,极易发生异物侵线从而造成安全事故的难题,本文提出了基于三维激光雷达与毫米波雷达融合的轨道作业车周边异物侵线监测技术。现场试验效果表明,该技术方案可有效识别并定位侵线异物,降低了现场异物侵线导致的安全风险,保障了施工安全。
