车联网环境下可重构智能反射面辅助无线信道估计算法
2022-09-03曾嵘杭潇
曾嵘,杭潇
(杭州电子科技大学通信工程学院,浙江 杭州 310018)
0 引言
可重构智能反射面(RIS,reconfigurable intelligent surface)具有低成本、无源可控的硬件结构[1],这为其应用于毫米波系统、太赫兹系统[2-3]提供了无限的可能。RIS 概念一经提出,就被广泛应用于无线通信的各个领域。RIS 由大量的无源反射元件构成,每个元件都可以被数字控制,通过改变入射信号的独立振幅和/或相移变化,系统就可以改变发射机与接收端之间的无线信道。因此,RIS 被赋予了重塑无线传播环境以有利于信号传输的能力。与传统的有源中继波束成形不同,RIS能够实现全双工无源波束成形反射[4],且不需要任何有源射频链用于信号传输、接收和自干扰抵消。RIS 还具有额外的实际优势,如低轮廓、轻重量和保持几何形状,因此RIS 可以实现灵活且大规模的部署。由于RIS 具有上述性能特点,其已被广泛研究并纳入各种无线通信环境中,如系统吞吐量[5]、网络覆盖范围[6-7]、通信安全[8-10]、通信速率[11-13]、信道估计[14-15]等。
RIS 应用于无线通信环境中可以提高系统传输性能,关键得益于RIS 的相移波束设计。由于RIS反射元件数量较多,为设计合适的RIS 相移波束,传统的设计框架通常需要获取完整的信道状态信息(CSI,channel state information)并涉及大量的训练开销。上述文献中均采用瞬时CSI,为实现瞬时性,需要额外搭建一条链路,实现收发端与RIS频繁的信息交换,提高硬件成本。车联网系统易获取通信过程中通信设备的相对位置信息,发射波束与RIS 相移设计仅依赖于从位置信息获取的统计,因此将RIS 应用于车联网具有三大优势:1)基于位置信息获取统计CSI[16],减少训练开销;2)与瞬时CSI 相比,位置信息变化慢得多,不需要频繁更新;3)用户、基站以及RIS 之间仅需要共享少量的位置信息,因此只需要低容量链接,进一步降低了硬件成本。然而将RIS 应用于车联网环境中也有以下挑战:1)车联网技术的定位性能存在一定的误差;2)车辆的移动性使信号在接收时受到多普勒频移的影响,需要在RIS 端做相应的多普勒补偿。这两点进一步增加了信道估计的计算复杂度。
本文研究了基于车联网易获得的位置信息,提出了一种基于位置信息辅助的压缩感知信道估计(LACSCE,location assist compressed sensing channel estimation)算法。本文主要工作介绍如下。
1)本文基于发送端、接收端以及RIS 相对位置信息构建系统模型,推导并证明了RIS 的最优相移信息相较于传统CVX 凸优化工具箱求解次优RIS相移信息有更低的计算复杂度。
2)本文根据求得的相移矩阵,基于压缩感知理论设计了符合目标信道函数的传感矩阵。
3)仿真结果分析表明,所提算法具有较低的计算复杂度,同时在估计信道性能上,相较于传统压缩感知算法、正交匹配追踪(OMP,orthogonal matching pursuit)算法有较高的估计性能。
符号说明:小写黑体字母a和大写黑体字母A分别表示向量和矩阵,AT和AH分别表示矩阵A的转置和共轭转置;diag(x)表示对角矩阵上向量x的对角矩阵,⊗表示克罗内克积,表示矩阵A的Frobenius 范数。
1 系统模型
本节详细介绍了RIS 辅助无线通信系统上行链路通信过程,如图1 所示,具体是在单用户场景下用户与RIS 系统以及接收天线的交互情况。接收天线数量为M,RIS 反射元件以均匀平面阵列(UPA,uniform planar array)排列且数量为N。
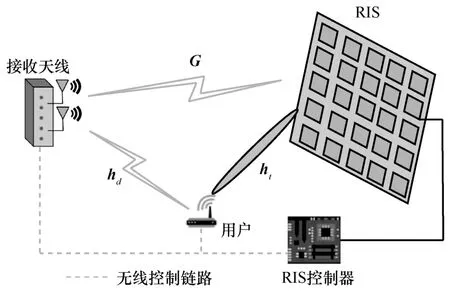
图1 RIS 辅助无线通信系统上行链路通信过程
基于车联网系统获得无线通信环境中基站(BS,base station)、RIS 以及单天线用户(User)的位置坐标,设

其中,所设坐标均为对应通信单元的中心点位置。由式(1)可求出RIS 到BS 无线信道中BS 接收信号的方位角与仰角,即
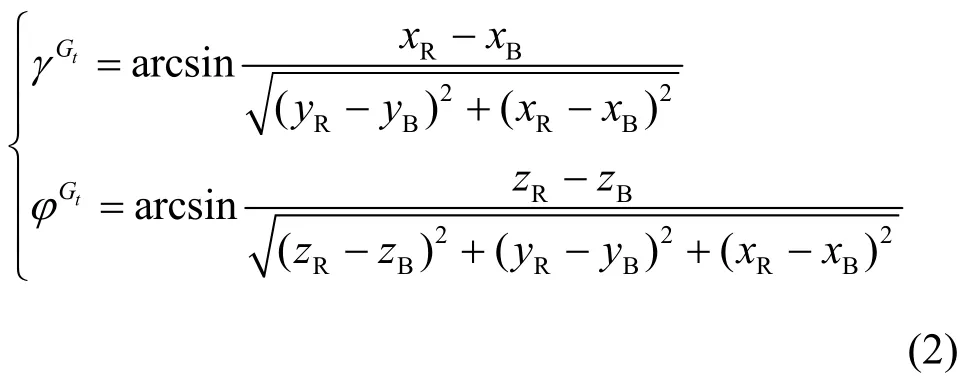
RIS 到BS 无线信道中RIS 反射信号的方位角与仰角分别为
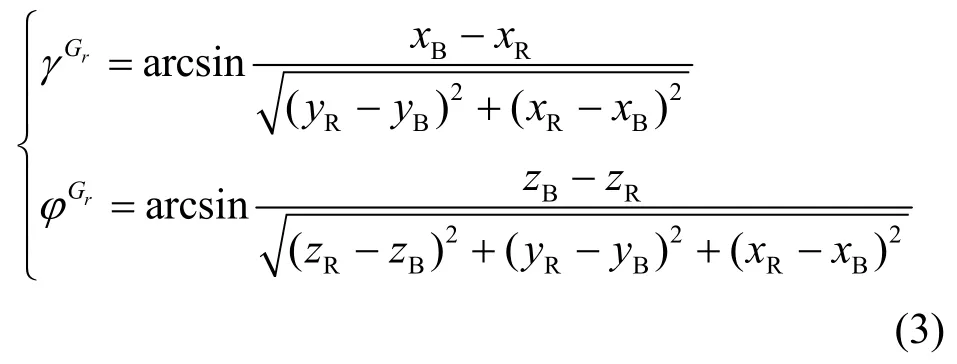
User 到RIS 无线信道中RIS 入射信号的方位角与仰角分别为
基于式(2)~式(4),首先构建BS 到RIS 的级联信道G,以及RIS 到接收端的级联信道ht,即
其中,M与N分别表示基站天线数量与RIS 反射元件的数量,αG表示接收端到RIS 的路径损耗,αt表示RIS 到发送端的路径损耗。a(γ,ϕ)与b(γ,ϕ)可进一步表示为

其中,γ与ϕ分别表示信号方位角与仰角,n1=n2=,m1=m2=,λ表示载波波长,为简化计算,设置天线间距d=。
定义用户的M×N级联信道H≜Gdiag(ht),将级联信道H用虚拟角度域表示,可进一步写为


其中,sq表示BS 第q个时隙发送的导频信号,表示RIS 处的N×1反射向量,θq,n表示第n个(n=1,…,N)RIS 反射元件在第q个时隙的反射系数矩阵,zq表示在第q个时隙用户接收端处的均值为0、方差为σ2的加性白高斯噪声。由级联信道H≜Gdiag(ht),可以将式(8)进一步写为

经过Q个时隙的导频传输后,可以获得M×Q的测量矩阵Y=[Y1,…,YQ]。假设sq=1,由式(7)可得测量矩阵为

其 中,Θ=[θ1,…,θQ],Z=[z1,…,zQ]。定义为Q×M的有效测量矩阵,为Q×M的有效噪声矩阵。基于压缩感知[17]模型,式(10)可以写成

2 基于位置信息辅助的信道估计算法
本节首先揭示角域级联信道的结构稀疏性,结合车联网中易获得的位置信息,在接收端信号功率最大准则下,推导出RIS 各个单元的最优反射系数,在此基础上,提出一种降低信道码本大小的信道估计方案,相较于其他信道估计方案,该方案有较低的计算复杂度。
2.1 角域级联信道
式(7)角域级联信道可以进一步写为

角域级联信道的稀疏性与系统考虑的多径数有关,如图2 所示,在信息传输的过程中,仅有3 个RIS反射元件(图2 中灰色方块)反射了入射信号。因此在级联信道中,RIS 辅助系统有效信道仅有3 条。

图2 角域级联信道的稀疏性
2.2 基于位置信息辅助的信道估计算法
本节利用车联网中的位置信息,基于接收端信号功率最大准则,获得RIS 初始相移矩阵,并基于此提出基于位置信息辅助的压缩感知信道估计(LACSCE)算法。
对于第q个时隙(q=1,2,…,Q)的接收信号Yq,基于接收端信号功率最大原则的目标函数为

基于位置信息可求得RIS 每一个元件的相移。假设RIS 的反射系数的模值β=1,根据构建的系统模型,第q个时隙下每个RIS 反射元件的相移可表示为,其中,r,c表示对应RIS 的第r行第c列元件的位置,则为(具体推导过程参考附录2)


由t1与t2进一步得到
构建完训练字典矩阵D后,为匹配每一时隙q下信道的大小,需要在每一时隙下构建一个N×q的RIS 反射系数矩阵

其中,Θq表示第q个时隙RIS 的N个元件的反射系数矩阵,Ν(N,q)表示N×q的全1 矩阵。由字典矩阵D与RIS 反射系数矩阵Θq构建第q个时隙下的感知矩阵Aq,结合接收信号进行信道估计。

本节在此基础上考虑了位置信息准确度的问题,主要是考虑位置信息的不准确导致字典矩阵求解的准确性问题,在这个问题上主要结合式(15)、式(16)进行修改,即

其中,Rn可表示为

其中,η为误差的粒度,χ的取值由位置误差的大小决定,即χ=,ς为位置误差,dUR为User与RIS 之间的位置距离。由式(22)、式(23)的T1与T2可进一步得到
由于T1和T2为 1×(2ϕ+1)的矩阵,故需要对误差信息提取第k个值(k∈[1,2ϕ+1]),并依次执行式(25)~式(27)。由误差字典矩阵Γk与RIS 反射向量矩阵Θq,根据式(21)构建新的感知矩阵。
结合式(11),由第q时隙下接收信号与感知矩阵Aq的相关性,求得振幅模值最大行为


根据上述推导,LACSCE 算法的具体流程如算法1 所示。
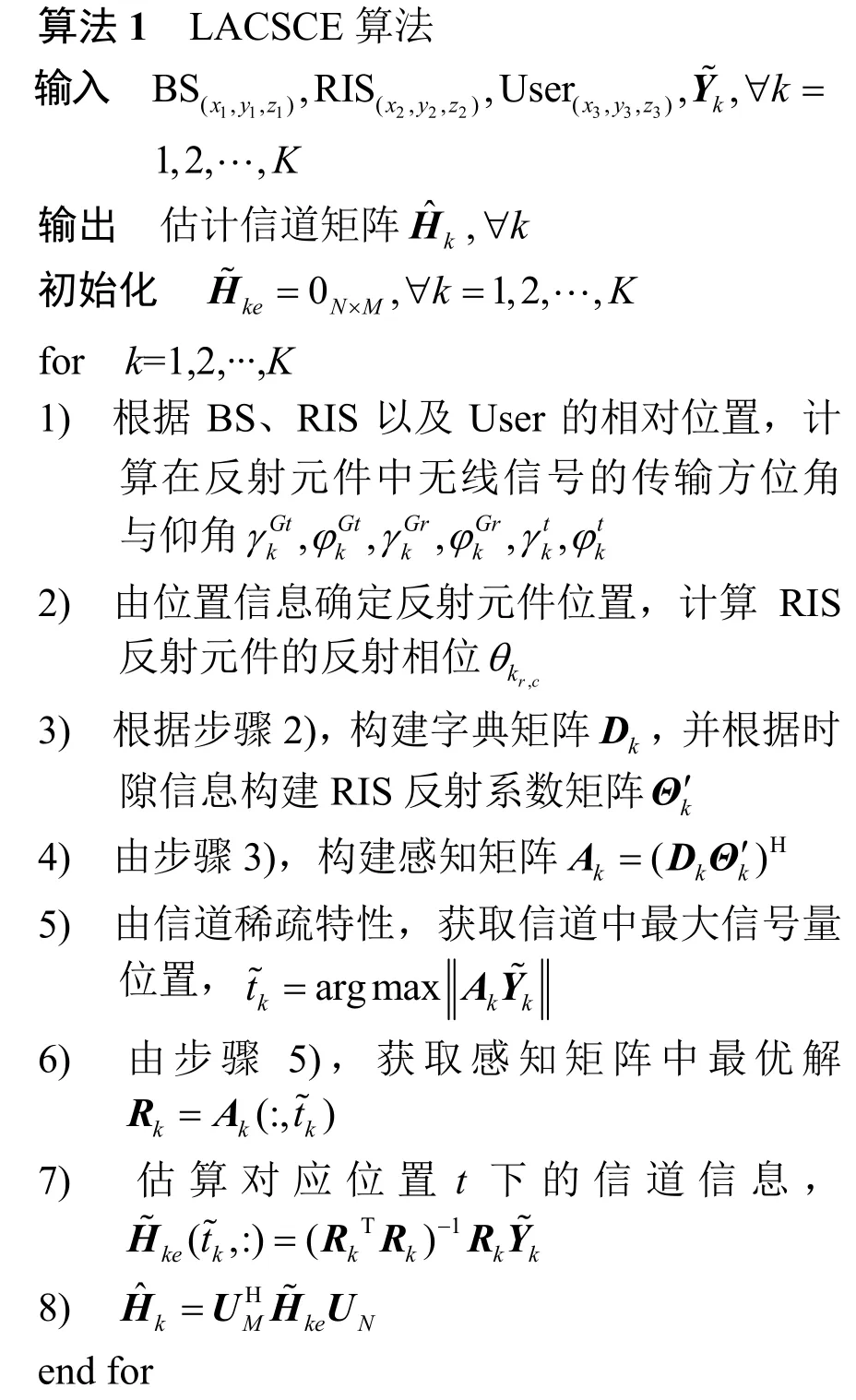
2.3 基于位置信息辅助的信道估计算法复杂度分析
本节对LACSCE 算法复杂度进行详细介绍,首先基于位置信息求解RIS 反射相位矩阵的计算复杂度为Ο(KMN2),根据求解的感知矩阵A估计矩阵的计算复杂度为Ο(KQN),因此本文所提算法的计算复杂度为Ο(KMN2)+Ο(KQN)。相较于传统压缩感知算法中给定随机相移矩阵,匹配相移矩阵信息,直接进行信道估计的计算复杂度为Ο(KQMN2),本文所提算法的计算复杂度较低。
3 仿真结果与分析
本节主要将本文提出的LACSCE 算法与目前比较热门的信道估计算法进行比较,此外,还研究了系统本身的参数变化对信道估计的影响,比如不同信噪比条件下算法的性能,不同的RIS 到接收端的距离、不同的RIS 到发送端的距离以及不同RIS 反射单元数量对算法的影响。假设发送端到接收端直接链路信号传输被阻挡,在仿真中考虑整个通信系统中仅有一个RIS 系统,设定仿真模型从发送端到接收端仅有一条有效路径,具体系统仿真参数如表1 所示。仿真过程中,使用归一化均方误差(NMSE,normalized mean square error)评估系统性能,计算式为
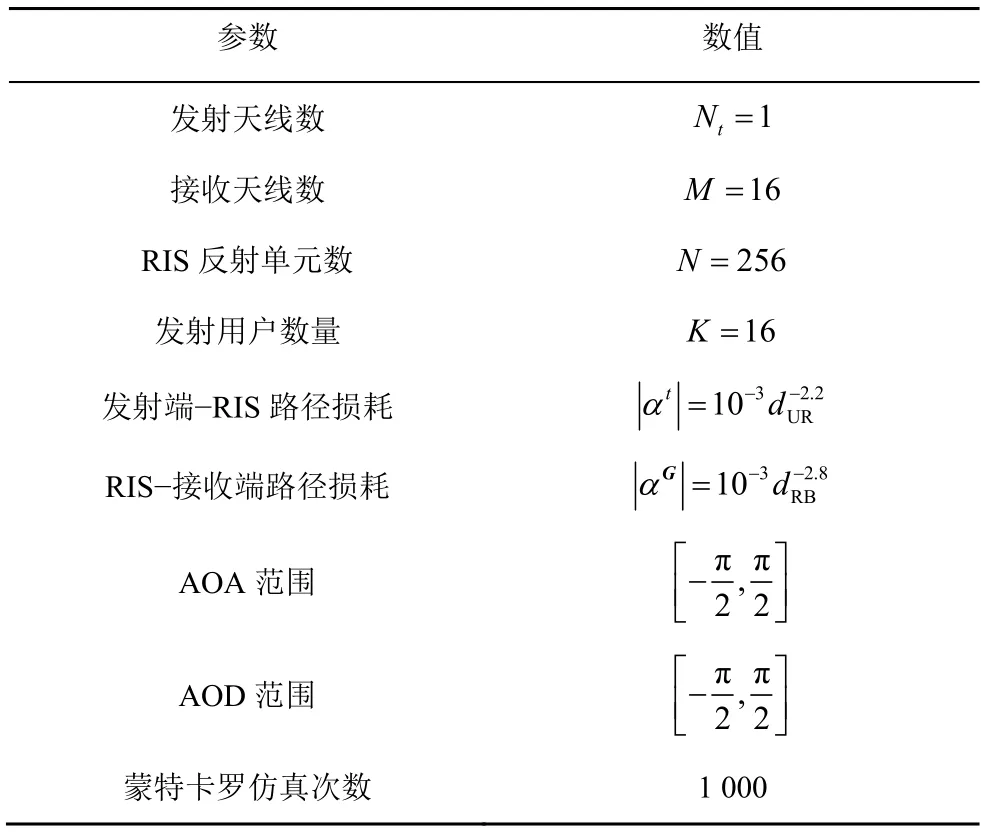
表1 系统仿真参数

其中,J表示蒙特卡罗仿真次数,表示第j次仿真级联信道的估计结果,H表示实际信道信息。
本节将本文提出的LACSCE 算法与目前的热门算法进行了对比,其中仿真参数为:RIS 元件数量为16 ×16,RIS 到接收端的距离dRB=10 m,发送端到RIS 的距离dUR=100 m,级联信道噪声功率设置为0。Q个时隙下LACSCE 算法与其他算法的性能比较如图3 所示,此外,本节以已知信道并给定随机相移矩阵的Oracle LS 方案[18]估计信道作为准则。在同一时隙下,LACSCE 算法相较于传统CS 算法、传统OMP 算法以及基于CVX工具箱求解RIS 相移有较好的性能。同时随着Q的增加,LACSCE 算法相较于其他算法的性能提升更明显。

图3 Q 个时隙下LACSCE 算法与其他算法的性能比较
考虑时间复杂度,在仿真过程中,设定位置误差为ς=1 m,根据时间优化原则,设定误差颗粒度为η=6。此次仿真主要考量了以下4 种算法(基于CVX 工具箱、传统OMP 算法、LACSCE 算法以及位置误差LACSCE 算法)执行7 次信道估计的平均时间,如表2 所示。具体信道估计时间详细结果介绍如下。
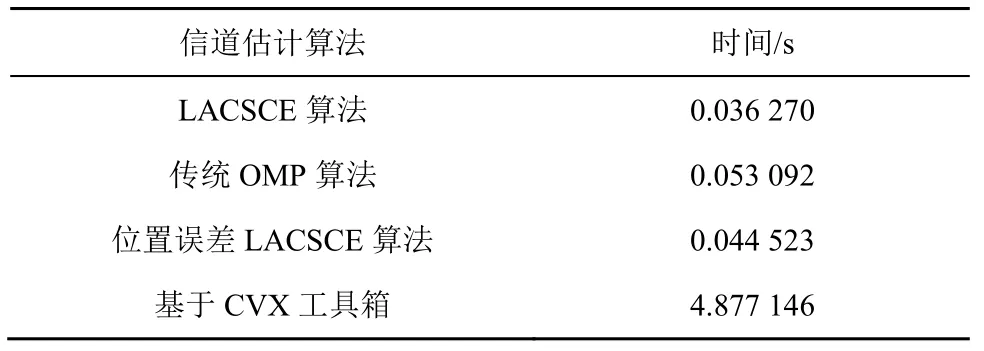
表2 4 种算法执行7 次信道估计的平均时间
算法的执行处理器为Core i5-8300H,8 GB 运行内存,256 固态+1T/1050Ti,MATLAB 版本为R2016a。从执行时间上可以看出,本文提出的LACSCE 算法执行一次信道估计的时间约是传统OMP 算法执行时间的一半;在有位置信息误差的条件下,LACSCE 算法执行的时间会随着误差颗粒度η的增加而增加;相较于CVX 工具箱求解RIS 反射相位后进行OMP 算法求解,时间节省得更多。不同算法执行信道估计的时间长短还与RIS 元件数量有关,随着RIS 元件数量的增加,执行一次信道估计的时间也会随之增加。考虑到系统性能与RIS 元件数量有关,图4 给出了不同RIS 元件数量下的NMSE,设定在发射功率固定的情况下,发射功率与接收端噪声方差之比为0。仿真结果表明,随着RIS 元件数量增多,信道估计性能逐渐提高,LACSCE 算法的NMSE 值与RIS 元件数量成反比。

图4 不同RIS 元件数量下的NMSE
参考RIS 元件数量对算法性能的影响,接下来分析通信系统的信噪比对系统性能的影响,如图5所示。相较于传统OMP 算法,LACSCE 算法在更低的系统信噪比情况下有更好的性能。比较LACSCE算法与传统OMP 算法在SNR 值为−5 dB 与9 dB 时估计的NMSE 值可以发现,2 种算法估计的NMSE在9 dB 处的差值大于−5 dB 处的差值。
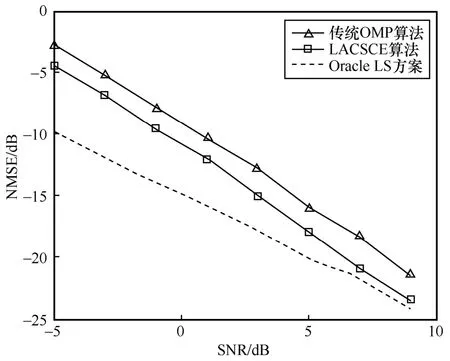
图5 通信系统的信噪比对系统性能的影响
此外,本文还考虑了RIS 与发送端及接收端的距离不同时系统性能的变化,如图6 所示。从图6可以看出,在不同距离条件下,系统的估计性能不同。当dUR与dRB分别为[20,100]、[10,100]、[10,80]时,NMSE 相差不大;当dUR与dRB为[10,120]时,NMSE 相对提升约7 dB;当dUR与dRB为[20,80]时,NMSE 相对于[10,120]提升2 dB 左右;dUR与dRB在[20,120]时估计的NMSE 性能最高,相对于[20,80]提升3 dB 左右。通过对不同的dUR与dRB的仿真可以看出,RIS 部署的相对位置对信道估计性能有较大的影响。
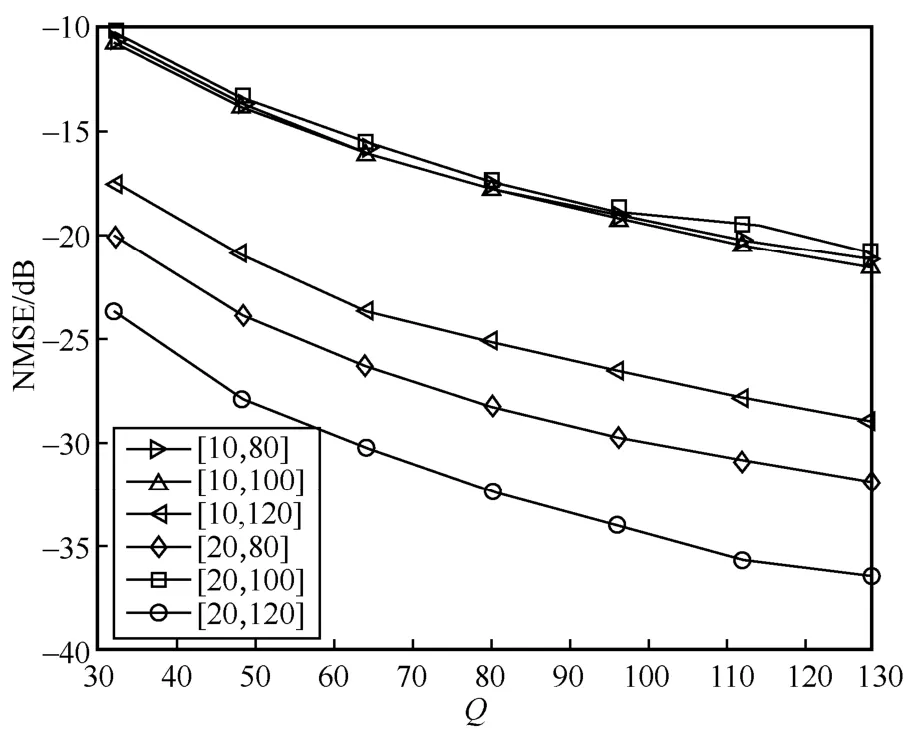
图6 RIS 与发送端及接收端的距离不同时系统性能的变化
4 结束语
本文研究了车联网环境下单RIS 辅助无线通信系统的级联信道估计方案。首先,根据车联网中易获得的发射端、RIS 辅助系统以及接收端的相对位置,构建三维模型,其中RIS 辅助系统以均匀面阵列逻辑部署。然后,推导出在接收端信号功率最大准则下RIS 各个反射单元的最优相移,构建RIS 最优相移矩阵,基于RIS 最优相移矩阵进一步设计了符合目标信道函数的感知矩阵。最后,基于压缩感知理论,通过迭代估计信道信息。基于位置信息的获取设计了最优相移矩阵,降低了对级联信道额外的信令开销,进一步降低了信道估计的计算复杂度。将本文提出的LACSCE 算法与传统CS 算法、传统OMP 算法以及基于CVX 工具箱求解RIS 次优相移矩阵方案进行对比,仿真结果表明,本文提出的LACSCE 算法相对于其他传统信道估计方案有较好的NMSE 估计性能,并且具有较低的计算复杂度。为适应未来无线通信的发展需求,接下来可以研究单RIS 同时辅助2 个用户,甚至更多用户时最优相移的设计问题,以满足移动终端密集环境中的eMBB 需求,例如商场、车站等环境。
附录1 通过CVX 工具箱求解RIS 相移矩阵
首先构建目标函数

定义ε=[ε1,ε2,…,ε N]H,其中,εn=,∀n。为简化运算,定义相移矩阵的元素=1,可将式(31)转换为
其中,Φ=diag(ht,k)G,定义B=ΦΦH,进一步将式(32)转化为

注意,εHBε=tr(BεεH),因此定义E=εεH,其中E满足且rank(E)=1,由于秩1 约束是非凸的,将该问题通过半正定来解决,即

上述问题是标准凸半定程序,可通过CVX 工具箱求解,首先得到E的特征值,将其分解为E=UDUH,其中U=[e1,e2,…,eN]和D=diag(a1,a2,…,aN)分别是一个酉矩阵和一个对角矩阵。然后获得一个次优解ε=,其中r∈CN×1是一个随机向量,服从零均值和协方差矩阵为IN的圆对称复高斯分布。式(33)目标值ε=ejarg(ε(1:N)),此方法保证了最优目标值的近似,但是该方法计算复杂度过大。
附录2的推导过程
根据式(5)和式(6),针对RIS 辅助系统的反射信号对应的RIS-BS 的信道向量与入射信号对应的User-RIS 的信道向量可以分别表示为

其中,α1与α2分别表示User 到RIS 的路径损耗和RIS 到BS 的路径损耗,Tt(γt,φt)与分别定义为


当没有RIS 辅助系统时,即定义相移矩阵θ为单位矩阵,此时目标函数为

当有RIS 辅助系统时,定义RIS 相移矩阵,目标函数为

结合式(39)与式(40)的推导计算,可以定义当前时隙下RIS 辅助系统中第r行第c列个反射单元的相移值为