一种网箱清理水下机器人设计*
2022-09-03李伟洪肖景强麦家伟刘孝贤
林 广 , 李伟洪 , 肖景强 , 麦家伟 , 刘孝贤
(广东海洋大学机械与动力工程学院 ,广东 湛江 524088)
深海网箱指的是设置在较深海域,利用新材料、防海水腐蚀等技术建造的抗风浪能力强、集约化程度高、养殖容量大的圆形双浮管式大型网箱[1]。但由于网箱长期浸泡在水下区域,易受海洋污损及生物侵害,大量藻类往往附着在网箱外围,会导致网目阻塞,阻碍水体交换,从而造成鱼类缺氧死亡,甚至会导致网箱破裂和鱼类出逃,造成严重的经济损失,因此,需要相关设备定期对网箱进行清洗。但目前我国深海网箱养殖业配套设备研发相对滞后,网箱自动化清洗设备较为缺乏[2-3]。
水下机器人是开展海洋探索所需的重要工具,早在16 世纪就有科学家对水下潜器进行研究[4]。但我国引进大型深海网箱时间较晚,对网衣清洗设备的研究也不多[2]。基于此,课题组根据水下网箱的清理需求,设计出一种网箱清理机器人。该机器人可高效地清理水下网箱,提高了水产养殖智能化程度,为养殖产业的可持续发展(即保护养殖区生态环境、合理利用资源和提高经济效益)奠定基础[5]。
1 整体结构和工作原理
网箱清理水下机器人主要应用于深海水下养殖网箱的清洗,由螺旋桨运动装置、清洗装置、检测装置、主控装置、机架等组成,整体结构如图1所示。工作人员将机器人放入水中,位于机身四角的水深传感器检测水深反馈数据为小值,通过STM32控制舵机的电机角度,实现机身下潜。位于机身前方的超声波传感器检测机器人与网箱的距离,并回传模拟信号。STM32通过程序算法计算出机器人的运动路径,通过改变舵机的角度使机器人进入工作区域。到达工作区域后,机器人开启清洗装置,进行网箱的清理。期间,超声波传感器与STM32时刻保持通信,保持网箱与机身的距离。在清洗过程中,机身会出现振荡摇晃,位于内部的六轴传感器将机身偏移数据反馈给STM32处理,利用pwn控制调整舵机角度,使机器人保持平稳。当机器人下降到箱子底部时,位于机身底部的水下测距模块超出了检测的有效范围,机器人向左移动,舵机控制调整电机角度上浮,重新开始清洗运动。在完成一次网箱清洗后,机器人上浮回到水面,表面的4个传感器将自身检测的数据经处理后反馈给STM32,机器人又开始下潜,重复清洗运动。清洗工作完成后,机器人自动上浮,工作人员通过渔船将机器人回收。
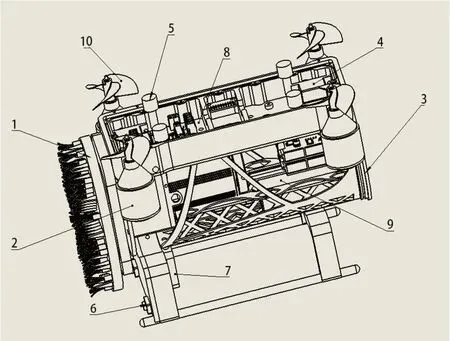
图1 网箱清理水下机器人结构图
2 主要结构装置设计
2.1 运动装置设计
目前,市面上的水下机器人大多使用电机搭配螺旋桨来为水下运动提供动力,保证水下机器人具有良好的运动特性[6]。本设计则在机器人四周布置4个防水电机,由电机提供动力。电机与螺旋桨之间采用联轴器连接、顶丝固定的安装方式,以保持运动中螺旋桨结构的紧凑。在电机上方空腔内设有轴承和轴套,减少电机旋转时与机体内壁的摩擦。电机外壳的向外伸出杆与舵机采用螺栓连接,使电机螺旋桨整体倾斜角度由舵机控制,通过PID程序输出的信号实现控制。4个舵机角度相互配合,使机器人实现上下沉浮。在靠近外壳缝隙连接处设有橡胶防水圈,防止因水体进入而导致零件损坏。机器人的运动装置如图2所示。
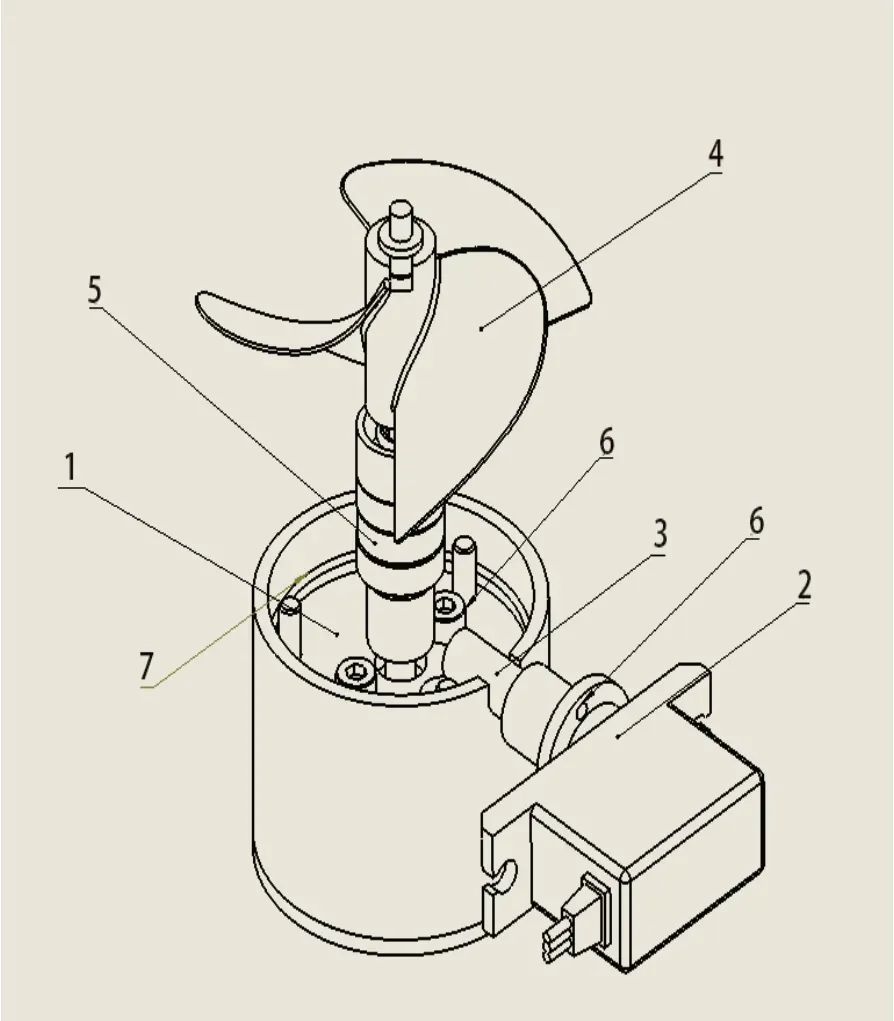
图2 运动装置内部图
2.2 清洗装置设计
机器人清洗装置结构如图3所示,主要由清洗盘、联轴器、执行电机、橡胶圈、固定件等组成。清洗盘为一种圆形壳体,尾部设有连接口,由螺栓与联轴器固定相连,盘上设有多个毛刷孔,每个孔位都装有一定硬度的尼龙毛。另外,清洗盘上还设有多根硬质针状钉子,可辅助清理附着在网箱上的贝类。电机则由STM32控制开启。当机器人开始清理时,直流减速电机启动旋转,经联轴器传递扭矩带动清洗盘旋转,清理网箱中的藻类和贝类寄生物。用户可以根据自身需求,更换毛刷类型,以达到更好的清理效果。
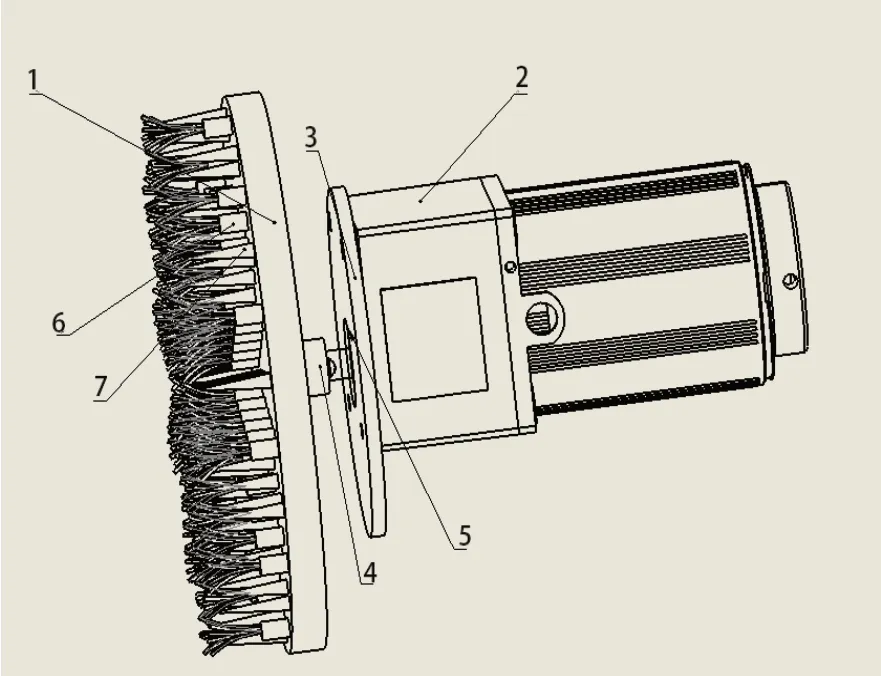
图3 清洗装置结构图
3 主要控制原理设计
3.1 固定位距控制原理
根据结构方面的清理机制,本装置采用水下超声波测距模块采集信息。水下超声波测距模块的测量距离为3 cm~450 cm,该模块的测量精度和距离能够满足设备正常清理水下养殖网箱的要求。水下超声波测距模块主要用于测量设备与网箱的距离,并将采集的数据传送给STM32主控板,主控板通过程序上设定的卡尔曼滤波算法及PID算法对数据进行处理。STM32控制板根据此数据调用程序上的函数指令,控制舵机的执行角度和直流减速电机的开启、停止及正反转等相关操作,进而控制设备与网箱的距离。设备与网箱固定距离控制原理如图4所示。
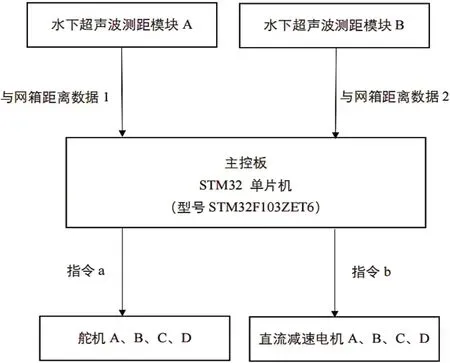
图4 设备与网箱固定距离控制原理图
3.2 姿态调整原理
由于自身运动以及浪潮对表层水流动的影响,机器人在水体的沉浮平衡会因为上述原因出现一定的波动。为了使其处于理想的工作姿态,课题组为机器人装配了能够实时监控自身位置欧拉角的MPU6050六轴传感器模块,并通过Mahony互补滤波算法得到比较准确的欧拉角。设备顶部四角装备的水深传感器测得机器人自身各方向的水深数据后,将其传送给STM32中控板进行PID算法处理,计算出机器人在各方向传感器之间的误差值,将得到的误差值换算成相应的PWM占空比信号,反馈给电机调速,从而控制自身姿态。MPU6050模块测得的六轴姿态信号和贴网压力信号能够使机器人维持良好的贴附状态[7],能够更好地保障设备在运动方向上不会出现脱离清理网面轨迹的现象,从而实现更好的清理效果。姿态调节控制原理如图5所示。

图5 姿态调节控制原理图
3.3 自动化清洁轨迹部分
设备上搭载了多种传感器,顶部有4个水深传感器,底部有1个射向网箱方向的水下红外测距传感器。由于设备清理的网箱通常是圆柱形,可通过比较精确的传感器之间相互配合来实现清理轨迹的逻辑,设备用到的传感器有效范围如下:水深传感器0.002 m~300 m、水下激光测距传感器0.03 m~40 m。清理轨迹的逻辑如下。
首先,设备顶部的4个水深传感器可检测设备目前的在水深度,当4个水深传感器测量到目前设备的水深数据在0~0.04 m的范围,同时水下激光测距模块测量的数据在0.03 m~40 m之内,默认设备漂浮在水面上,机体尚未下潜;当4个水深传感器测量到目前设备的水深数据在0.04 m~300 m范围内,同时水下激光测距模块测量的数据大于40 m时,默认设备已经到达网箱底部。
其次,程序上设置了两种设备沉浮状况的转向信号。一种是设备的水深数据为0~0.04 m并且水下激光测距数据在0.03 m~40 m的情况;另一种是设备的水深数据为0.04 m~300 m并且水下激光测距数据大于40 m的情况。当上述两种情况发生其中一种时,设备将通过中断程序、执行转向程序来驱动行走机构,行走机构会使设备在网箱接触点的切向方向朝该接触点的x轴负方向移动一个滚轮盘长度的横向距离。
最后,经过多次执行上下沉浮和向左移动的重复动作后,网箱将会被清理干净,机器人完成设定的工作任务。
3.4 整体电路控制系统设计
设备开启,主控板进行初始化,各传感器进行初始化。待机状态可进行蓝牙遥控。蓝牙断开,处于自动工作状态时,传感器将实时数据传给STM32主控单片机处理。主控板将相应的信号传给驱动模块以及舵机,舵机驱动舵盘转动到数据设置值,驱动模块将主控的PWM微弱信号放大为驱动减速电机的PWM输入电流,进而控制电机的转速。其中程序控制中断优先级如下:姿态调整>固定位距调整>自动轨迹行走调整。电路模块控制原理如图6所示。
4 结论
海洋渔业的迅速发展,要求智能化的水下机器人随之进步,这也将是水下机器人的未来发展方向[8]。课题组从实际出发,综合考虑了水下网箱养殖的工作场景和用途,分析机器人
的运动和清洗原理,设计了水下网箱机器人的结构(清洗装置、运动装置)以及控制系统。该机器人能够有效解决目前网箱养殖的清洗问题,提高运营效率,节省时间并降低成本,对水下机器人的总体设计具有一定的借鉴和指导意义,对于水产养殖业的发展也有比较重要的意义[9-10]。

图6 电路模块控制原理图
