基于EDEM的浙贝母排种器设计与试验研究*
2022-09-03章勇杰黄政晖宋源普倪忠进倪益华杨自栋温春雨
章勇杰 , 黄政晖 , 宋源普 , 倪忠进 , 倪益华 , 杨自栋 , 温春雨
(浙江农林大学光机电工程学院,浙江 杭州 311300)
0 引言
浙江省中医药产业结构较为完整,种植产业经济效益高,其中浙贝母种植总量约占全国90%,种植面积约为5.5万亩,年产量约9 000 t,产值约9亿元[1-3]。随着浙贝母种植面积的扩大,浙贝母种植出现了效率低、机械化水平低、人工种植劳动强度大等系列问题。在浙贝母机械化生产中,浙江省丘陵山区坡地较多、地块小且分散,在农机转移、运输等过程中受限严重,且中大型农机无法正常作业[4-6]。针对浙江省丘陵地区特殊地势地貌,研究设计浙贝母种植机械,不仅可以解决浙贝母种植生产效率低、农户劳动强度大等问题,还可以提高农民种植浙贝母的经济收益,更可以推广到其他中药材的生产过程中,加快“三农”建设步伐,推动农业机械化发展。
因此,课题组针对上述浙贝母种植问题,因地制宜地设计了一种小型浙贝母排种器。
1 排种器结构及工作原理
浙贝母排种器主要由种箱、传动链轮、播种通道、种勺及传动链条等部件组成,其结构如图1所示。工作时,种贝由于自身重力和种贝间挤压作用进入种勺中,完成充种过程。随排种器传动链条转动,种勺中种贝进入运种过程,当传动链条转动到播种通道,种勺中种贝掉落至另一个种勺背面。在播种通道中种贝随传动链条转动至通道底部进入投种过程,依靠种贝自身重力及机器运行所获速度,从播种通道掉落到种沟中,完成单颗种贝的投种。

图1 排种器结构示意图
2 关键部件设计
2.1 浙贝母种贝三轴尺寸
参考茎块类作物物料测量方法[7-8],测量浙贝母种贝长度、宽度和高度,定义其几何尺寸,如图2和图3所示。随机选取15组,每组1 kg种贝,测量其三轴尺寸,取各组数据平均值作为种贝三轴尺寸,结果如表1所示。
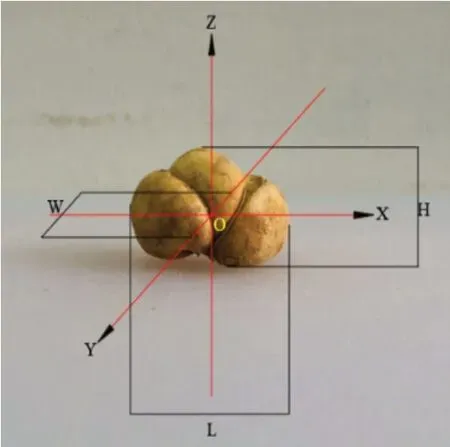
图2 种贝几何尺寸

图3 种贝三轴尺寸测量

表1 种贝几何尺寸
经测量,浙贝母种贝长为36.62 mm,宽为32.69 mm,高为19.55 mm,外部形状呈椭圆球状,将种贝外形尺寸简化为椭圆形,可为种勺等关键部件结构设计和浙贝母离散元仿真模型建立提供数据支撑[9-10]。
2.2 种勺设计
由于种贝长为36.62 mm,宽为32.69 mm,高为19.55 mm,种勺形状设计为端面,D1=37 mm、D2=33mm凹弧形,为防止种贝从种勺中掉落,底部凹弧深度最小值取10 mm。种贝外形呈椭圆球形,为满足种贝落入种勺中能贴合自身形状,种勺设有凹弧结构。种勺三视结构示意图如图4所示,为方便种勺拆装换取,采用3D打印技术生产。
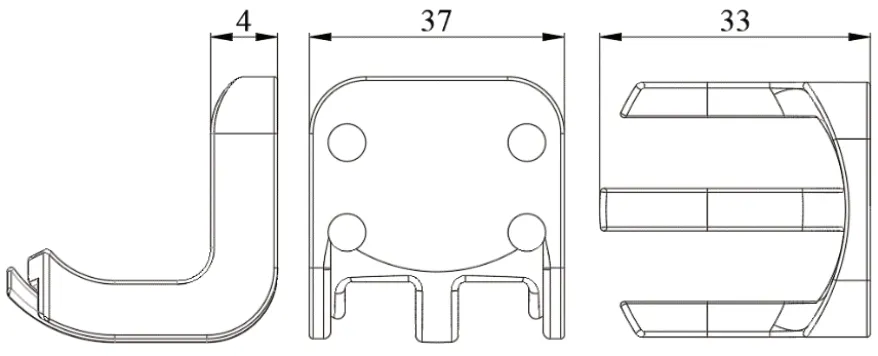
图4 种勺结构示意图
种勺端面凹弧结构设计依照“最速降线”截曲线原理,种勺三维模型如图5所示。种勺主要结构参数为端面底部凹弧开口直径D1和D2、种勺深度H及凹弧截曲线等。

图5 种勺三维模型图
种勺设计需遵循下式:

式中,为种贝长度方向最大值平均值;为种贝高度方向最大值平均值。
为了便于分析研究,将种贝视为质点,假设种贝选择滑移时间最短轨迹进入种勺底部,将种勺端面凹弧处边界曲线设计为“最速降线”[11-13]。实际的种贝运动轨迹图如图6所示。当种贝从种勺开口处滑移至种勺底部,其经历最短路径,即最速降线曲线。
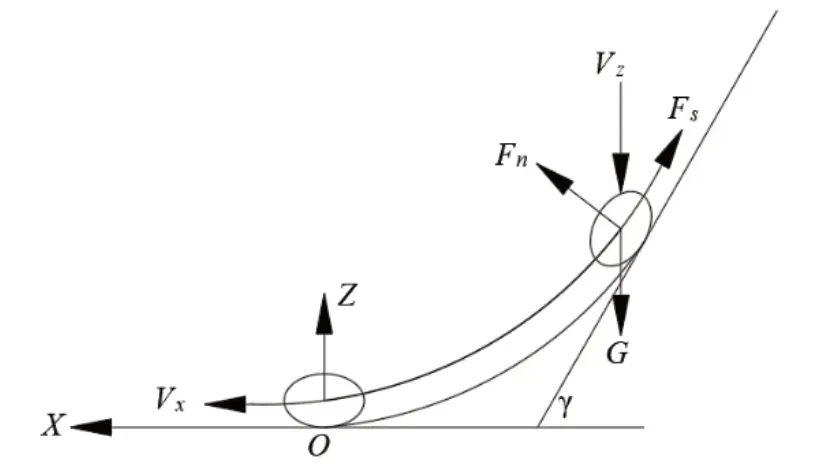
图6 种贝实际运动轨迹图
将种勺凹弧中心最低点作为坐标原点O,建立直角坐标系。为简化截曲线方程,将其视为抛物线,即:


以上式研究种贝在XOZ平面内运动状态,则:式中,m为种贝质量,g;ɡ为重力加速度,m/s2;γ为种勺凹弧线边缘切线与水平夹角,°;φ为种贝与种勺摩擦角,°;G为种贝自身重力,N;Fn为种勺对种贝的支持力,N;Fs为种贝与种勺的摩擦力,N。
假设种勺取种过程中摩擦力Fs所做功为w,当种
贝滑落高度为h时,其横向位移为即种贝滑落至种勺底部,此时截曲线为最速降线。
当z=h时,,则种勺与种贝摩擦力Fs所做功w为:

在种贝滑向种勺底部过程中满足能量守恒定律,即:


整理可得:
简化可得:

式中,vz为种贝滑落初始速度,m/s;vx为种贝停止滑落水平速度,m/s;h为种贝滑落高度,mm,其最大值为种勺深度H。
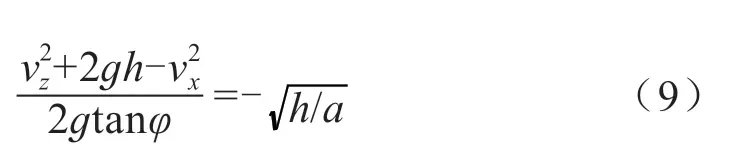
将上式代入种勺截面曲线抛物线方程z=ax2中,可得:

理想状态下,种贝滑至种勺底部凹弧时速度vx为0 m/s,种贝滑落高度h为种勺深度10 mm,种贝与种勺间摩擦系数为0.396。参考小型牵引式中药材播种机,实际作业过程中排种器传动链轮转速为2.2 r/s~14 r/s,种勺线速度为0.1 m/s~0.65 m/s,种贝滑移轨迹在x方向的数值为16.5 mm,代入公式可得最速降线曲线切线倾角为45.29°~60.08°。
2.3 传动链轮设计
链轮设计主要考虑种贝在翻越主动链轮时所受的离心力,离心力过大时,种贝会做离心运动而被抛出排种器外。排种器传动链轮结构如图7所示。由于板链为匀速运动,因此种贝在翻越主动链轮时离心力与重力大小不变。

图7 主动链轮结构示意图
种贝在翻越主动链轮时受力分析如图8所示,种贝在越过直线L0时开始受到离心力、种贝与种勺间作用力及自身重力作用。
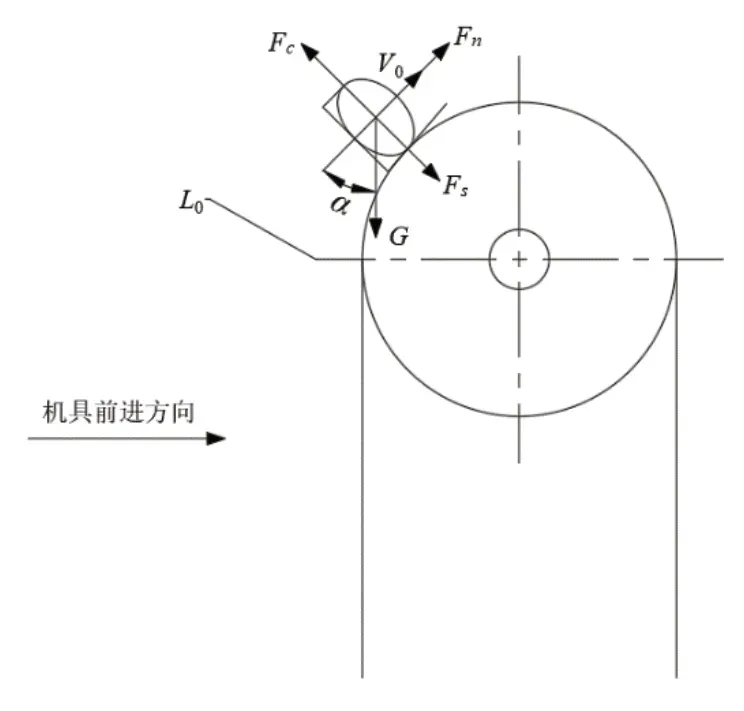
图8 主动链轮受力分析图
为保证种贝在种勺中不被甩出,种贝所受各力应满足以下条件:
式中,Fs为种贝所受种勺摩擦力,N;Fc为种贝所受离心力,N;Fn为种贝所受种勺支持力,N;α为种勺相对旋转角,°;μ为种勺对种贝摩擦因数;v为板链线速度,m/s;R1为主动链轮齿顶圆直径,mm。
简化上式可得:


式中,v为排种链条线速度,取最大值0.65 m/s;主动链轮转速为13.8 r/s,α∈(0, 90°)。
不等式右边取最大值,α取45°,经计算可得R1≥39 mm。
考虑到加工难易程度,板链取标准件,链条选取08B链条,链轮选取08B 18齿链轮。考虑到机械紧凑性、播种稳定性及链条为整数节,将两链轮中心距设计为241 mm,以满足排种稳定性、增加充种时间、提高播种质量。
3 排种器机构仿真与分析
采用EDEM离散元仿真试验对浙贝母排种器进行虚拟仿真,根据试验结果对排种器结构进行优化[14-17]。
3.1 模型建立
3.1.1 浙贝母模型建立
种贝属性设置如表2所示,以浙江磐安浙贝母为参考,种贝模型如图9所示。

表2 种贝物料特性参数

图9 种贝模型
3.1.2 土壤模型建立
设置土壤颗粒半径为5 mm,土壤属性参数如表3所示,土壤模型如图10所示。

表3 土壤特性参数

图10 土壤模型
3.1.3 排种器模型建立
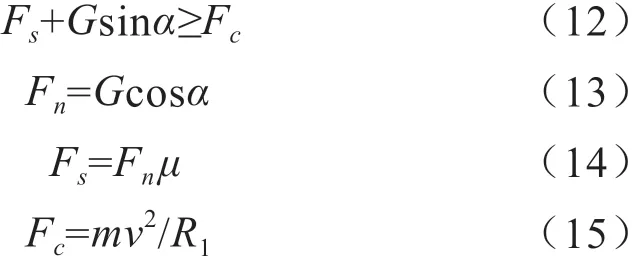
将排种器三维模型导入EDEM离散元仿真软件中,如图11所示。排种器模型参数如表4所示。将排种轴设定为转动部件,其他零件简化为固定件,种箱上方区域设定为种贝颗粒生成区域。
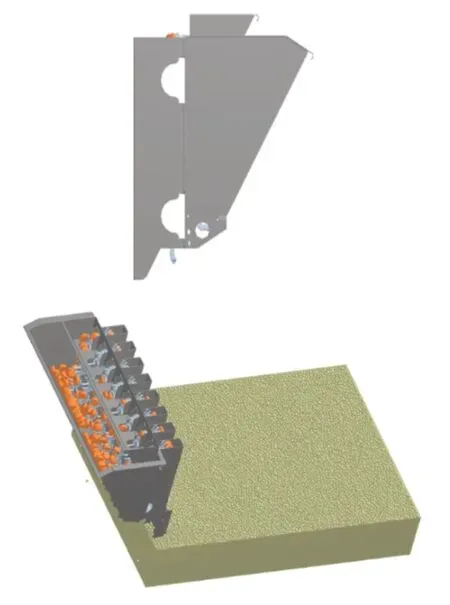
图11 排种器仿真模型
3.2 排种器性能单因素试验
实际工作中,排种性能受前进速度、播种通道倾斜角度以及种贝掉落离地高度等因素影响。
3.2.1 试验方法
选择200个种贝颗粒作为初始条件,设置排种器前进速度、播种通道倾斜角度、种贝掉落离地高度对照组进行仿真试验,统计仿真结束后种贝合格指数(种贝鳞芽朝上且种贝未发生破损),以确定各参数对排种器作业性能的影响。
3.2.2 试验结果与分析
在排种器作业过程中种贝出现漏种、单粒、重种三种状态,如图12所示,种贝鳞芽朝上且未发生破损则定义种贝为合格,如图13所示。
图12 排种漏种、单粒、重种状态图

图13 播种合格示意图
1)排种器前进速度对种贝合格指数的影响。排种器前进速度对种贝合格指数仿真试验结果如表5所示。

表5 不同排种器前进速度下种贝合格指数
通过SPSS软件对排种器前进速度和种贝合格指数拟合出关系曲线,如图14所示。由图14可知,当前进速度在0.3 m/s~0.4 m/s时,种贝合格指数在80%以上,前进速度对种贝合格指数影响呈现先上升后下降趋势,当前进速度大于0.5 m/s时,种贝合格指数下降速度较快。

图14 排种器前进速度和种贝合格指数关系拟合曲线
2)播种通道倾斜角度对种贝合格指数的影响。播种通道倾斜角度对种贝合格指数仿真试验结果如表6所示。

表6 不同播种通道倾斜角度下种贝合格指数
通过SPSS软件对播种通道倾斜角度和种贝合格指数拟合出关系曲线,如图15所示。由图15可知,随倾斜角度增加,种贝合格指数呈现平稳趋势,当倾斜角度在0°~20°时,种贝合格指数为80%~87%。
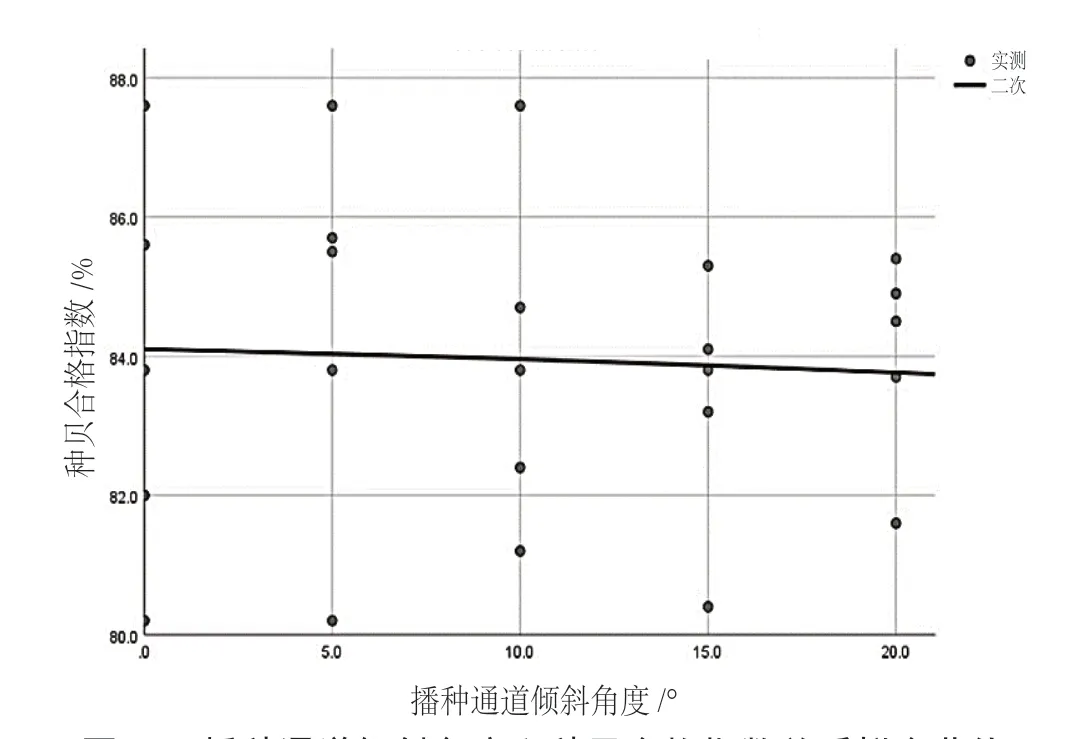
图15 播种通道倾斜角度和种贝合格指数关系拟合曲线
3)种贝掉落离地高度对种贝合格指数的影响。种贝掉落离地高度对种贝合格指数仿真试验结果如表7所示。

表7 不同种贝掉落离地高度下种贝合格指数
通过SPSS软件对种贝掉落离地高度和种贝合格指数拟合出关系曲线,如图16所示。由图16可知,随离地高度增加,种贝合格指数呈现持续下降趋势,且下降趋势明显。

图16 种贝掉落离地高度和种贝合格指数关系拟合曲线
3.3 排种器性能多因素试验
由于各个因素间存在一定的交互性,为研究三个因素间交互作用对排种器性能的影响,需进行二次回归旋转正交仿真试验。以排种器前进速度、播种通道倾斜角度以及种贝掉落离地高度作为试验因素,以种贝合格指数作为排种器性能指标。
3.3.1 试验方法
选择三因素可控范围对试验因素水平设定参数,试验选择排种器前进速度范围为0.3 m/s~0.5 m/s,播种通道倾斜角度范围为0°~20°,种贝掉落离地高度范围为50 mm~100 mm,采用三因素三水平二次旋转组合设计试验研究排种器作业最优参数组合,因素水平编码如表8所示。

表8 因素水平编码
3.3.2 试验结果与分析
1)试验结果。在Design-Expert 12软件中Box-Behnken设计三因素三水平分析仿真试验,试验结果如表9所示。

表9 正交试验结果
2)结果分析。应用Design-Expert 12软件对表9试验数据建立关于排种器前进速度A、播种通道倾斜角度B和种贝掉落离地高度C对种贝合格指数影响的二次多项式响应回归模型,如下式所示。

二次多项式响应回归模型方差分析如表10所示。

表10 回归模型方差分析
根据回归模型分析所得结果,应用Design-Expert 12软件绘制各因素对种贝合格指数的交互效应3D响应曲面图。
排种器前进速度和播种通道倾斜角度交互效应3D响应曲面图如图17所示。在前进速度从0.3 m/s变化到0.5 m/s的过程中,种贝合格指数呈现先上升后下降趋势;在倾斜角度从0°变化到20°的过程中,种贝合格指数呈现稳定趋势。表明在排种器前进速度和播种通道倾斜角度交互效应试验中,仅排种器前进速度对种贝合格指数影响显著。

图17 排种器前进速度和播种通道倾斜角度交互效应3D响应曲面
排种器前进速度和种贝掉落离地高度交互效应3D响应曲面图如图18所示。离地高度从50 mm变化到100 mm的过程中,种贝合格指数呈现逐渐递减趋势;在前进速度从0.3 m/s变化到0.5 m/s的过程中,种贝合格指数呈现先上升后下降趋势。表明在排种器前进速度和种贝掉落离地高度交互效应试验中,排种器前进速度和种贝掉落离地高度对种贝合格指数影响显著。

图18 排种器前进速度和种贝掉落离地高度交互效应3D响应曲面
播种通道倾斜角度和种贝掉落离地高度交互效应3D响应曲面图如图19所示。在倾斜角度从0°变化到20°的过程中,种贝合格指数呈现稳定趋势;在离地高度从50 mm变化到100 mm的过程中,种贝合格指数呈现逐渐递减趋势。表明播种通道倾斜角度和种贝掉落离地高度交互效应试验中,仅种贝掉落离地高度对种贝合格指数影响显著。

图19 播种通道倾斜角度和种贝掉落离地高度交互效应3D响应曲面
3.3.3 试验优化与验证
为确定浙贝母排种器工作最优参数组合,应用Design-Expert 12软件以种沟中种贝合格指数最大值作为优化指标,对各参数进行优化,优化数学模型如下:

在Design-Expert 12软件中通过二次回归旋转正交仿真试验,可得浙贝母排种器作业最优参数组合:排种器前进速度为0.426 m/s,播种通道倾斜角度为16.048°,种贝掉落离地高度为84.017 mm。在该参数组合下,种贝合格指数为80.311%。
4 排种器样机试制
根据离散元仿真结果优化排种器模型并试制加工样机,通过进行田间试验来验证浙贝母排种器田间作业性能,浙贝母排种器三维模型及样机如图20所示。
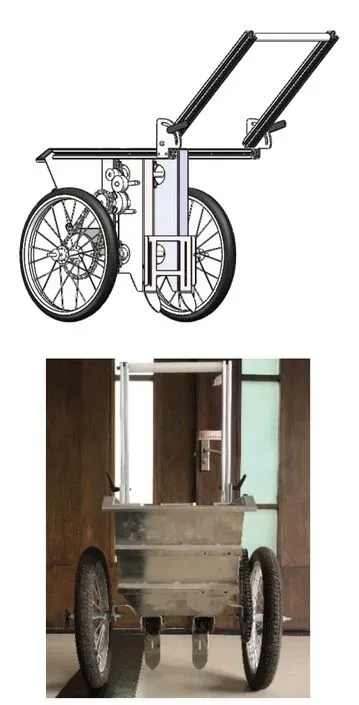
图20 浙贝母排种器三维模型及样机
5 排种器样机田间试验
5.1 试验方法
田间试验时,根据离散元仿真结果,排种器运动速度为0.426 m/s(成年人正常行走速度)。试验过程中,为保证试验数据的准确性,采集试验田中3垄浙贝母种植数据,每垄随机选取5段15 m地段长度进行指标测量,播种过程如图21所示,种贝株距和行距测量如图22所示。

图21 田间试验图

图22 浙贝母测量图
5.2 试验结果与分析
田间试验完成后,选择浙贝母排种器作业稳定性高播种区间进行数据采取,对试验指标进行统计计算,试验结果如表11所示。

表11 浙贝母排种器田间试验结果
浙贝母排种器性能指标包括合格指数S、重播指数D、破损指数P、漏播指数M,各指标计算公式如下:

式中,N为播种总数,颗;n0为种贝漏播数,颗;n1为种贝单粒排种数,颗;n2为种贝重播数,颗;n3为种贝破损数,颗。
经计算可得:S为79.25%,D为13.22%,P为1.12%,M为6.41%。
据当地农户估计,不合格种贝减产率为20%,则种贝整体减产率为4.15%,符合浙贝母机械化种植技术规范,田间试验结果如表12所示。

表12 浙贝母排种器田间试验结果统计
6 结论
1)课题组设计并试制了链勺式浙贝母排种器,解决了丘陵山区浙贝母机械化生产受阻的问题。
2)单因素试验表明:排种器前进速度和种贝掉落离地高度对种贝合格指数影响显著,播种通道倾斜角度对种贝合格指数影响不大。
3)多因素试验表明:浙贝母排种器作业最优参数组合为排种器前进速度0.426 m/s,播种通道倾斜角度16.048°,种贝掉落离地高度84.017 mm。在该参数下,种贝合格指数为80.311%。
4)样机田间试验表明:链勺式浙贝母排种器满足浙贝母机械化种植技术要求,浙贝母合格指数为79.25%,重播指数为13.22%,漏播指数为6.41%,破损指数为1.12%。据当地农户估计,不合格种贝减产率为20%,则种贝整体减产率为4.15%,符合浙贝母机械化种植技术规范,表明排种器结构设计满足实际浙贝母播种要求。
