无人机航摄在基础测绘1∶10 000 DOM与DEM局部更新中的应用
2022-09-01赵彦栋
王 友,赵彦栋
(甘肃省地图院,甘肃 兰州 730000)
0 引言
近年来,随着经济的高速发展和基础设施建设的进程加快,局部范围内的地形地貌发生了很大的变化,而基础测绘数据的快速更新,特别是地形要素的快速更新为后期规划起到了至关重要的作用。无人机航空摄影测量技术作为目前最高效的手段之一,可以更准确、更全面、更快速地获取局部变化范围内的地形地貌,大大提高了更新效率和效果。
现阶段的基础测绘数据获取主要是利用大型运输飞机搭载航摄仪(ADS80,ADS100)或卫星影像进行数据生产。前者飞行条件严格、天气要求苛刻,一个架次的航摄面积过大,针对局部更新成本过高;而后者更新时间过长,影像覆盖面积更大,时效性低,无法进行随时补飞和航摄。当前社会发展较快,更新速率也比较快,如果再采用原有数据获取模式,就很难满足市场上用户的需求。而无人机航测技术的发展无疑弥补了这一缺陷,也成为这两种方式的有效补充。
与原有数据获取手段相比,该技术可实现短时间快速起飞、快速完成,同时测绘成本更低。无人机可实现单日至少几十平方公里的测绘面积,非常适合当前基础测绘地形小范围变化更新、高速化、高精度化的发展趋势[1]。
1 无人机航摄技术在基础测绘1∶10 000局部更新中的技术方案
本文采用无人机航摄技术辅助基础测绘1∶10 000局部更新,主要流程包括影像获取、数据处理以及数字正射影像(DOM)、数字高程模型(DEM)成果与已有基础测绘1∶10 000数据的融合。本文根据省级基础测绘变化更新项目案例,具体讨论该技术实际应用与方法。
1.1 无人机影像数据获取
首先,结合前期影像资料,确定变化更新范围。根据实地勘察,了解测区的气象条件和地形条件,查看周围是否有高大建筑、障碍物等;再根据无人机和载荷设备的实际情况调整飞行计划。具体航摄步骤如图1所示。
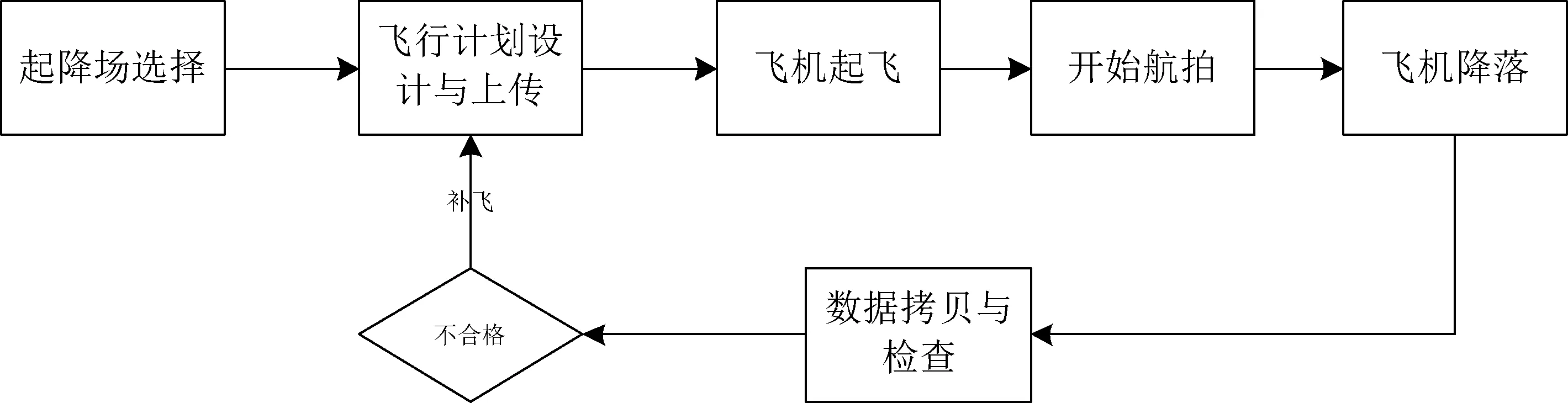
图1 航摄工作流程
其次,前期需进行像控点布设。随着当前科技的发展,即便无人机配备了定位定姿系统(Position and Orientation System,POS),又称高精度位置与姿态测量系统(IMU/DGPS)[2-3],使得航测精度得到大幅提升,但也无法保证在各种地形条件下都能满足高程精度的要求。所以,为保证精度达到规范要求,需要在野外进行像控点量测。
最后,在获取数据后进行数据的质量检查。根据航摄规范要求,相邻相片的航向重叠度一般要求在60%~80%,旁向重叠度15%~60%,在高差大的地区,还应扩大重叠度[4]。假如重叠度不够,照片之间就会产生航摄漏洞,需现场进行影像快拼检查,如有漏洞,需要补飞。
1.2 无人机影像数据处理
无人机数据处理一般包括数据预处理、空中三角测量、密集点云匹配、点云分类、点云滤波、数字地面模型、数字正射影像生产等流程。本文采用Agisoft photoscan影像处理软件[5],首先,利用无人机的POS数据进行对齐照片,即利用无人机自带POS系统进行区域网平差解算,为保证精度要求,再利用像控点进行控制点平差,即完成空三测量;其次,对区域网模型中高重叠度的影像,采用同名点前方交汇的方法进行影像密集匹配处理,获取海量点云数据;再次,进行点云分类和数据滤波处理,生成空三加密成果的DSM;最后,通过DSM对原始影像进行数字微分纠正,最终生产出数字正射影像数据DOM。具体流程如图2所示。
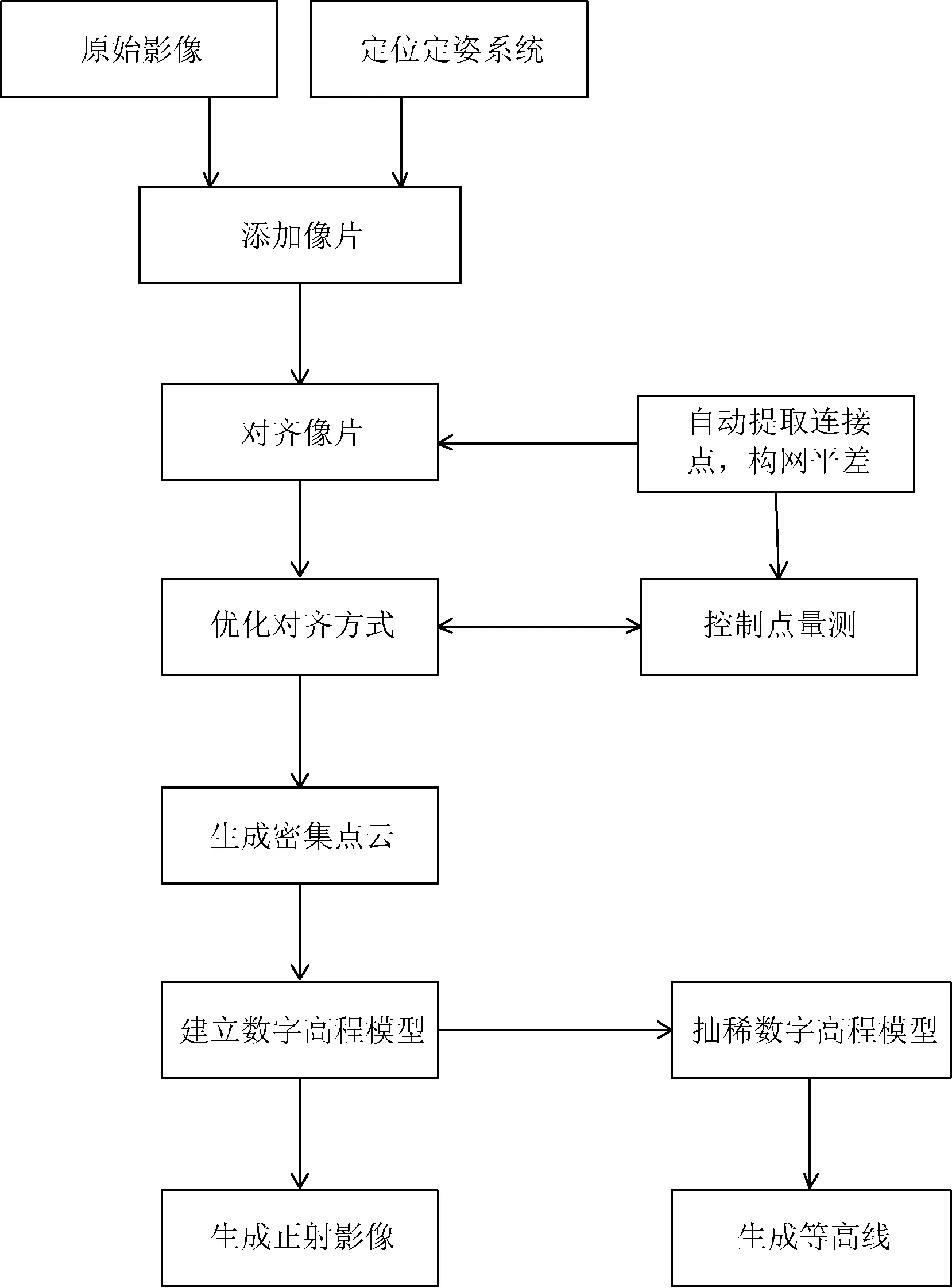
图2 技术路线
2 应用案例
2.1 测区概况
以甘肃省定西市称钩驿镇为研究区。测区沿西南至东北呈狭长地形,两侧为山地,平均海拔1 942 m,属于温带大陆性气候。本文选取其中一块地貌变化较大区域进行航飞作业,该区域面积为7.2 km2,长5 km,宽1.5 km。
2.2 航飞情况
本次航飞使用纵横CW-15复合翼无人机,可以垂直起降,受起降场地影响较小,稳定性强,并自带POS定位系统,配备PPK后差分模式,可有效保证数据精度,云台搭载SONY-A7RⅡ型正射相机。相机参数及航摄参数设置如表1所示,具体航线规划如图3所示。

表1 相机参数与航摄参数

图3 航线规划
本次航摄共飞行了两个架次,采集航片1 038张,航摄期间天气良好,风速3~4级,飞行姿态稳定,无偏航情况,飞行质量较好,重叠度满足设计要求。
3 成果与应用
3.1 成果输出
根据本次航飞数据,最终生成该测区的DOM,DEM以及等高线,分别如图4~6所示。
图4 DOM

图5 DEM
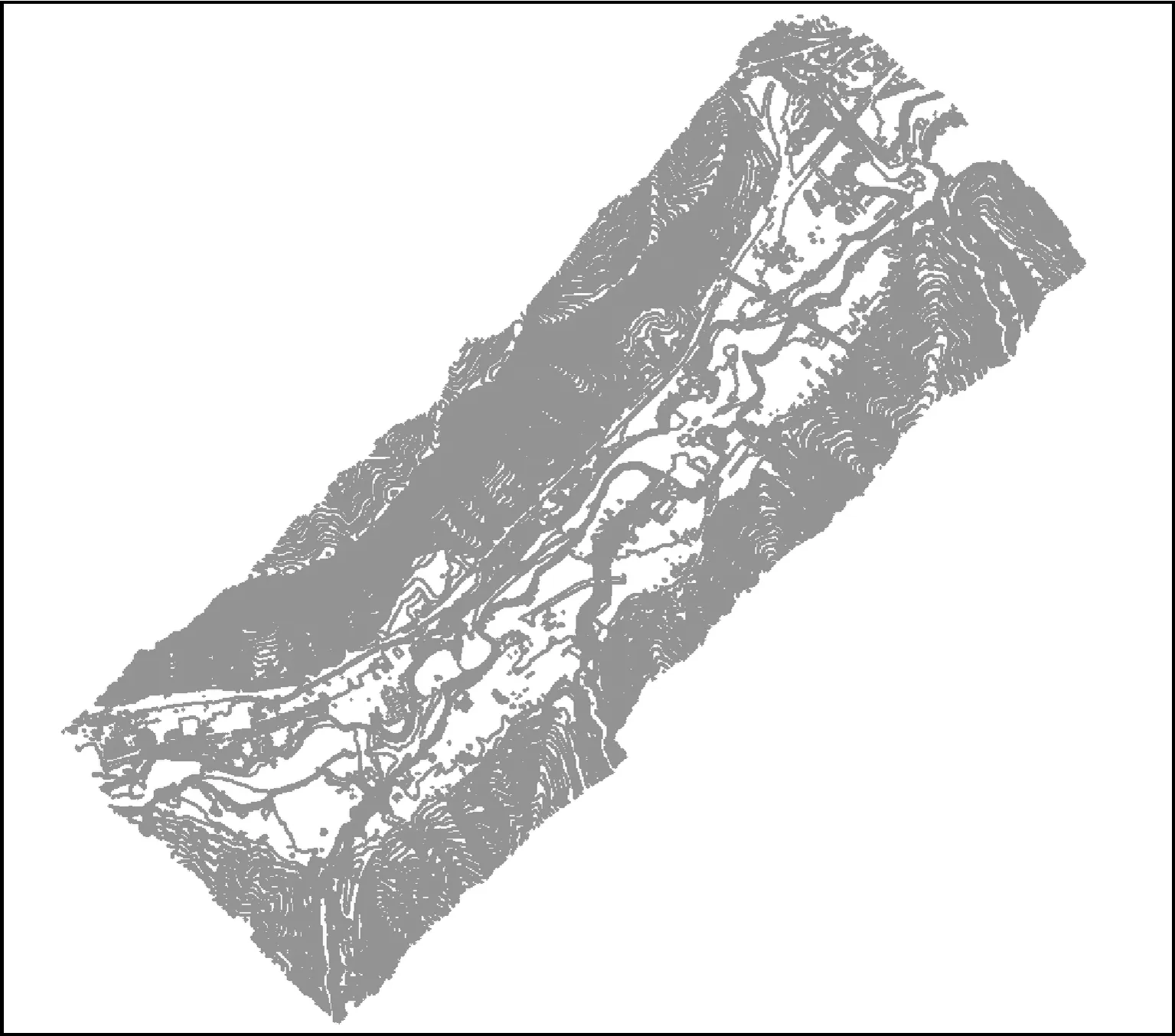
图6 等高线
3.2 数据融合
3.2.1 DOM与已有数据融合
无人机航飞成果的地面采样间隔(GSD)为0.06 m,将无人机成果影像重采样为1 m分辨率,将处理后数据与原有卫星影像进行融合拼接,匀光匀色处理,完成影像更新。
3.2.2 DEM与已有数据接边
由于基础测绘更新图幅比例尺为1∶10 000,可将最终DEM成果抽稀至5~10 m格网间距使用并生成等高线。将生成变化区域的等高线与已有等高线接边,完成基础测绘局部更新。如图7所示,左上方等高线为原有等高线,右下方等高线为无人机影像匹配处理后等高线和原有等高线重合区域,基本与原始影像套合一致。

图7 等高线套合
4 精度验证
为了保证平面精度和高程精度符合规范的要求,本文在航摄范围内共选取了9个均匀分布的控制点进行量测,分别在道路交叉口、围墙拐角等明显地物处进行标记点制作。将实测坐标与影像上同名点坐标进行差值比较与中误差计算。
如表2所示:平面位置最大误差为0.14 m,最小误差为0.01 m,平面位置中误差为0.12 m;高程位置最大误差为0.50 m,最小误差为0.02 m,中误差为0.26 m;等高线接边误差均在5 m内,满足限差要求。结果表明,在高山地区,无人机影像成果不仅达到了1∶2 000成图精度要求,还达到了1 m格网等高距的精度要求,因此完全满足省级基础测绘1∶10 000地形图的精度需要。

表2 精度统计表
5 结语
实践证明,将无人机航空摄影测量技术用于1∶10 000基础测绘地形变化更新上,能高效、快速地完成生产任务。随着我国经济的快速发展,城市规划、道路桥梁设计、水利设施建设等行业对测绘数据的需求越来越大,时效性也越来越新,为加快响应和更新速度,无人机航空摄影测量技术作为一种高效的测绘手段,必将推动测绘行业的蓬勃发展。
