基于三维激光扫描的历史建筑测绘应用研究
2022-09-01方余铮府伟娟贺飞越
李 楠,方余铮,府伟娟,贺飞越
(1. 中煤浙江测绘地理信息有限公司,浙江 杭州 310016)
Cyclone软件是处理点云数据的较为常用的软件之一,该软件可对扫描效果好的点云数据进行拼接、去噪、滤波、分割和分类、统一化、特征线提取等一系列处理,为后期建筑物二维图绘制提供点云数据处理技术基础。本研究以温州某历史建筑为研究对象,采用徕卡P40 三维激光扫描仪,对其进行全面扫描,获取历史建筑表面的点云数据。在此基础上,将点云数据在Cyclone 软件中通过拼接、去噪、统一化等处理,得到该历史建筑的高精度完整点云数据。通过cloudworx软件,在CAD中加载处理好的点云数据,绘制历史建筑二维图,为历史建筑归档提供建筑物精细CAD图纸,促进历史建筑归档的完备性。此外,为更好地展示历史建筑的整体性,将处理后的点云数据在Smart3D 软件中建模,获得该历史建筑实体三维模型。最后对二维图纸及三维建模进行精度评价,结果表明其具有较高精度。本文研究在三维激光扫描应用历史建筑测绘方面具有一定的参考价值[1-7]。
1 三维激光扫描技术
三维激光扫描系统主要由扫描仪、控制器和电源供应系统以及附属构成,如图1 所示[8]。三维激光扫描技术通过发射激光的方式对建筑物进行扫描测量,获取建筑物表面的空间点云信息。该技术根据激光束从发射到返回所用的时间计算出距离观测值S,通过精密时钟控制编码器,保证激光扫描仪能够同步地测量出横向扫描角度观测值α和纵向扫描角度观测值θ。此外,根据返回激光信号的反射强度,结合通过校正的彩色相片,还可得到该激光脚点的颜色匹配信息[9]。扫描测得目标点的点位坐标公式如式1。
目前,三维激光扫描仪根据扫描空间位置不同,可分为机载型三维激光扫描仪、地面型三维激光扫描仪、车载型三维激光扫描仪、手持型三维激光扫描仪4 类[10]。根据测量方式不同,可分为脉冲式、三角测距式、相位式、脉冲相位式4类(如图1)。

图1 三维激光扫描系统
三维激光扫描仪扫描获取大量点云数据后,在点云数据处理软件中(本文采用Cyclone 软件)对其进行后期处理,包括点云配准、点云去噪、点云滤波、点云统一化等步骤,其中点云配准为关键步骤,本文采用ICP算法对建筑物点云数据进行配准。
2 历史建筑扫描项目
2.1 项目概况
本文扫描对象为浙江省温州市某历史建筑,始建于清乾隆四十四年(1779),坐北朝南,由前厅、戏台、厢房、正厅组成合院式木构建筑,占地面积约540 m2,主体为砖木结构,屋顶为歇山顶,上下两层,整体建筑呈四合院模式,整体保存一般。建筑物正面图如图2所示。

图2 建筑物正面照片
2.2 点云数据采集
对历史建筑进行数据采集之前,需要对建筑物所在现场进行踏勘,通过踏勘了解整个宗祠的结构,分析空间布局及外部特征,确定控制网及扫描站的布设方式,制定外业数据采集方案。本项目采用徕卡P40三维激光扫描仪,总共布设22个测站,对该历史建筑进行从内到外,从下到上的全面扫描,获取建筑物整体点云数据。布设站点时需要注意以下三点:①尽量避免扫描盲区,根据测区的地形及建筑物的结构,设定扫描间距在10 m 左右,点云分辨率为3.1 mm@10 m。对建筑物的点云数据需要完全采集,避免出现漏采现象,通视困难或在拐角时应适当增加测站,保持能够全面获取建筑物点云数据。②根据建筑物的特点,尽量在满足应用的需求上,合理安排扫描仪测站位置,保证在获得建筑物点云数据的基础上,尽量减少测站数,以减少噪声点及无效数据。③布设站点时需考虑当地交通及人文情况,尽量减少游人及居民带来的干扰。
在扫描过程中需要进行标靶布设,为后续点云配准做准备。标靶按类型可分为磁质标靶、球形标靶和纸质标靶。本项目点云数据采集中使用磁质标靶和纸质标靶。标靶的布设应在扫描范围内均匀布置且高低错落[11]。每一扫描站的标靶个数应不少于4 个,相邻两扫描站的公共标靶个数应不少于3 个,且避免标靶布设在一条直线上。同时采用全站仪和RTK对建筑物进行控制网布设,以将点云数据从相对坐标转换到绝对坐标上。数据采集与处理流程图如图3所示。

图3 数据采集与处理流程图
2.3 数据处理
2.3.1 点云数据处理
本项目将点云数据导入Cyclone 软件中,对其进行拼接、去噪、统一化等处理。下面着重介绍点云拼接及点云去噪2个步骤。
1)点云数据拼接。采用三维激光扫描仪进行数据采集时,每一测站获得的点云数据是独立坐标系,需要将每一测站点云数据配准到统一坐标系下,形成一个整体的点云数据,此过程为点云配准。点云配准是后续处理步骤能否完整完成的前提。本项目采用最邻近迭代配准(ICP)算法进行配准工作,最终点云配准的平均误差为1.01 mm。
2)点云去噪。点云数据采集的过程中会不可避免地扫描到建筑物以外的非目标点,这些存在的差点和错误点就是噪声点。产生噪声点的主要原因有三点:第一,扫描时仪器的震动及扫描仪的精度等引起的扫描仪本身的系统噪声;第二,扫描物体表面的光滑程度、材质、颜色的反射特性引起的噪声;第三,扫描过程中游人、居民、车辆等遮挡引起的偶然噪声。这些噪声点占用计算机存储空间,影响点云数据质量。为确保数据的有效性,需要对这些噪声数据进行剔除,通常采用人机交互方式进行降噪处理。拼接去噪后的点云数据如图4所示。

图4 拼接去噪后的点云数据
2.3.2 建筑物二维图绘制
利用CAD插件cloudworx,将处理后的点云数据导入CAD 中,对其进行旋转、定义工作面、裁剪等操作,绘制建筑物平面图、立面图、剖面图、大样详图。在绘制期间需注意以下3点:①绘制平面图时需在平面视图,绘制立面图及剖面图时需在高程视图,否则会导致绘制出来的二维图不在一个平面,后期墙体绘制及标注等步骤不能顺利进行;②绘制建筑物平面图、立面图、剖面图、大样详图时,需要确保图中的尺寸相互对应,比如平面图中柱子直径尺寸与立面图和剖面图中相同位置柱子直径尺寸需一致,否则会导致绘制的二维图与实际不符。特别在进行标高标注时,需注意确保同一位置的标高在平面图、立面图、剖面图上一致。③绘制剖面图时,需对点云数据进行裁剪,这时需要寻找一个合适的剖切位置,保证剖切后的剖面较为完整,尽量不要存在不完整的柱子等问题。一般情况下,选取空间关系典型、能够反映历史风貌的结构和构造的部位进行剖切。根据点云数据在基于CAD 的cloudworx 中绘制建筑物二维图及大样详图如图5~8所示。
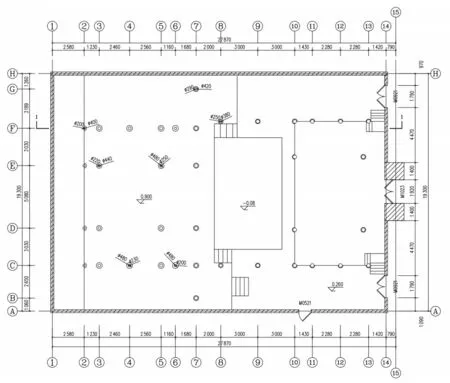
图5 建筑物一层平面图

图6 建筑物正立面图
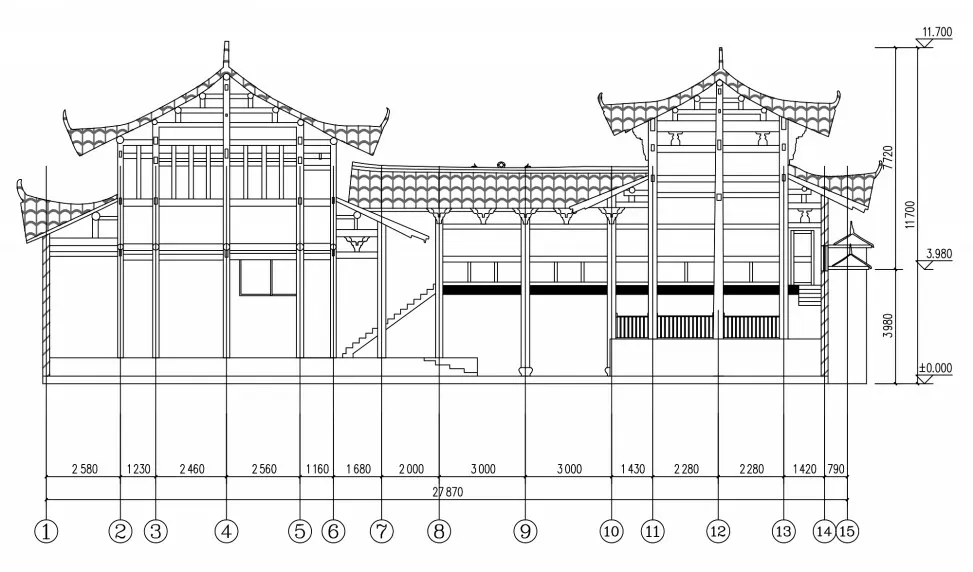
图7 建筑物剖面图

图8 建筑物大样详图
2.3.3 三维模型制作
为了使历史建筑完整地展现,本文将获取的点云数据在Smart3D 软件中建模,获得该历史建筑三维模型。首先,将点云数据在Cyclone 中进行统一化处理,对点云数据等进行比例抽稀。经过多次实验,设置抽稀比例为0.01 m 时,在Smart3D 软件中建模效果最好;其次,将抽稀后的点云数据导出成点云数据通用格式,即*las 格式;最后,将*las 格式数据导入Smart3D 软件中,进行三维建模。建模的效果图如图9所示。
从图9 中可以看到,建模效果并不是太理想,特别是屋顶存在较多碎片。经过分析,造成此现象的原因有以下2 点:①三维激光扫描仪本身放置在三脚架上,三脚架的高度存在局限性,扫描完整屋顶数据存在较大困难。在建筑物较低,仅为一层建筑时可以较为容易地扫描到完整屋顶,而对于本项目中的二层建筑或者其他多层建筑,扫描完整屋顶数据存在较大困难,导致在建模时会出现图9 中的屋顶碎片现象。但是采用获取的点云数据进行绘图时可以根据屋顶稀疏的点云数据,推理勾勒出完整的屋顶,并不会影响其二维图绘制;②从图9 中可以看出建筑物三维建模效果颜色并不是很真实,这是由于扫描时,每一测站照片曝光度和对比度的参数不一样,在阳光直射面及背阳光面明显存在差异。

图9 建筑物三维建模效果图
2.4 精度分析
本文研究的历史建筑物年代较为久远,但房屋保存较完整,可以对绘制好的二维图纸及三维模型进行精度验证。本项目采用激光测距仪实地量取建筑物的长和宽尺寸,计算图纸尺寸(S2)、三维模型尺寸(S3)与实测尺寸(S1)的差值绝对值(|ΔS|)及相对中误差(δ),评价其精度。测量结果如表1所示。从表1可以看出:①该历史建筑的长,图纸尺寸与实测尺寸的差值绝对值为10 mm,相对中误差为9.747 mm,三维模型尺寸与实测尺寸的差值绝对值为28 mm,相对中误差为28.012 mm;②该历史建筑的宽,图纸尺寸与实测尺寸的差值绝对值为7 mm,相对中误差为8.544 mm,三维模型尺寸与实测尺寸的差值绝对值为14 mm,相对中误差为16.135 mm。综上可知,本项目研究的历史建筑通过三维激光扫描获取点云数据后,绘制的二维图纸及三维建模具有较高的精度。

表1 实测尺寸与图纸尺寸、三维模型尺寸对比
3 结 语
本文以温州某历史建筑为研究对象,阐述了基于三维激光点云的历史建筑二维图绘制及三维建模,并对其进行精度评价。结果表明利用三维激光扫描仪获取该历史建筑点云数据,通过在Cyclone 中对点云数据处理后,在cloudworx中绘制的CAD二维图,以及在Smart3D中构建的三维模型,均具有较高的精度。本文方法充分发挥了三维激光扫描技术的优势,准确地获取该历史建筑的空间数据,促进历史建筑归档的完备性。
