应变片式力觉传感器的技术进展
2022-09-01段庆芳
段庆芳
中车建设工程有限公司 北京 100078
1 序言
传感器是一个技术密集、跨学科、非常复杂的机电一体化系统,是机器人智能化的重要部件之一。机器人的智能化是机器人领域长期研究的主要方向之一,也是广大科研人员为之奋斗的一个重要目标。传感器种类繁多,按其用途来分,可分为位移传感器、力传感器、速度传感器、加速度传感器、振动传感器和温度传感器等。人体是一个复杂而精巧的系统,能很好地利用感知去感受所经历的一切,例如:视觉、力觉、听觉等,而机器人只能通过安装类似的传感器去模仿人类拥有的这些感知,因此要使机器人可以感知到力,就必须在机器人需要感知力大小的地方安装力觉传感器。所谓力觉是指机器人作业过程中对来自外部力的感知,它与压觉不同,压觉力是垂直于力接触表面的力、三维力和三维力矩的感知[1]。通过在机器人上安装力觉传感器,检测感应并将信号传至控制系统,经过一系列计算得知力的大小,再经过一系列控制系统的计算,机器人将像人一样能对力的大小有所了解,并且对后续调整的方向做出判断,最终对自身动作举措进行变更调整。
目前,力的检测方式大致可以分为4种:①基于电阻的直接检测。②基于光纤的直接检测。③基于位移的间接检测。④基于执行器输入量的间接检测。根据检测方式的不同,力觉传感器可分为:应变片式力觉传感器、利用压电元件式及差动变压器的力觉传感器、电容位移计式力觉传感器等。其中,利用应变片测量应变、应力从而得到力的大小的力觉传感器最普遍。
本文介绍的应变片式力觉传感器,主要包括单维应变片式力觉传感器、三维应变片式力觉传感器、六维应变片式力觉传感器,基本工作原理是应变片变形后将导致电阻发生变化,通过测量电桥,将电阻变化转变为电压或电流的变化,再通过信号放大和一系列的运算,最终就可以检测出力的变化。
2 单维应变片式力觉传感器
单维应变片式力觉传感器的核心是应变片,主要利用应变片测量被测物体上应变、应力的变化,从而推知力或力矩的大小。检测方式基本是接触式,所谓的接触式就是大家熟知的将应变片直接安装在所需要检测的地方,单向的应变导致电阻变化,通过桥路可知电压或电流变化,再通过放大电路,最后经过运算,得知力或力矩的大小变化。目前,若感知力觉并且通过计算做出相应反应,则仅使用单维力觉传感器是远远不够的,往往是与其他传感器结合使用,例如弯曲度传感器。
目前,单独使用单维应变片式力觉传感器的简单应用较少,大部分是使用多个力觉传感器或者与其他传感器配合检测,以达到多维检测和控制、力和力矩同时检测等目的,实现机器的智能化、柔性化功能。
3 三维应变片式力觉传感器
三维力觉传感器是力觉传感器发展的趋势之一,可广泛应用于航空航天、机械加工、汽车、机器人及机械手等众多领域。近年来,随着半导体微加工技术的发展,三维力觉传感器的研究在国内外得到了迅速发展,基于不同工作原理的三维力觉传感器被纷纷推出[2]。
其中,三维应变片式力觉传感器由弹性元件、电阻应变计和惠斯通电桥电路组成。被测力作用在弹性元件上使其变形而产生应变量,粘贴在弹性元件上的电阻应变计将与物体重量成正比的应变量转化为电阻变化,变成电信号输出显示。三维力觉传感器可以同时检测三维空间的三个力信息(Fx、Fy、Fz),不但能检测和控制机器人手抓取物体的握力,而且还可以检测抓取物体的重量,以及在抓取操作过程中是否有滑动、振动等。
3.1 三维应变片式力觉传感器在昆虫足力测试方面的应用
随着仿生机器学的不断发展,工程技术人员可以通过研究生物运动进一步提供机器人等复杂系统的性能[3]。根据现有的对昆虫足力测试结果,昆虫的足与物体表面之间的接触力是三维接触力。因此,昆虫足力测试也需要相应的三维微力传感器(见图1)。昆虫足力测试传感器由金属弹性体(硬铝合金)、有机玻璃悬臂梁、测力片(有机玻璃)以及弹性体上的半导体应变计组成,将金属弹性体设计成倒“L”形,并在三处贴片位置贴有三组半导体应变计,分别用于测量被测力的3个分量(Fx、Fy、Fz)。弹性体在贴片位置的截面设计成悬臂梁式,目的是保证很小的力也可以被检测到。A贴片和B贴片只对Z向和Y向的力敏感,而在C贴片处,由于法向力分量Fz和水平力分量Fx都在该位置产生弯矩,因此在传感器使用之前,需要通过标定,获得灵敏度矩阵C。根据测得的桥路输出电压向量U和标定获得的灵敏度矩阵C,可以通过求解方程求得被测力的3个分量(Fx、Fy、Fz)。例如,黄斑蝽在塑料板上爬行过程中,足掌踩在测力片上表面,使得传感器获得表面上的三维接触力[4]。

图1 三维微力传感器结构
3.2 三维应变片式力觉传感器在多目标动态击打仪系统中的应用
应用于多目标动态击打仪系统的三维应变片式力觉传感器,能准确并实时反映出运动员击打目标时力的大小和方向、击打动作间的时间间隔、击打部位是否准确等,从而能够定量地刻画出运动员动作完成质量的状况。
三维应变片式力觉传感器原理如图2所示。结构设计时应做到对所测维力有较好的灵敏度,而对于非所测维力尽可能不灵敏,最好在理论上不起作用。当Fx作用时,此时R1、R2应变片若受拉伸,则R3、R4应变片受压缩,可通过输出电压推导力与电压的关系,从而得到此时电压对应测得的力,当Fy、Fz作用时输出电压可忽略,故能够很好地测出Fx方向的力值。
当受到载荷力F(Fx、Fy、Fz)时,传感器受力时形变主要发生在A、B、C贴片处及应变梁处,应变梁产生形变,贴在应变梁上对称布置的应变片电阻发生变化,改变电桥平衡使电桥引出端电压发生变化,根据输出电压的变化量测出矢量力。这种新型三维力传感器可满足应用领域对传感器特性的特殊要求。

图2 三维应变片式力觉传感器原理
传统电阻应变片式力觉传感器具有测量精度高、测量范围宽、构造简易、稳定及易于实现小型化等特点。智能机器人领域所需的传感器种类逐渐增多,技术指标逐渐加强,传感器的小型化指标也越来越高,并且其都是以弹性体为载体,电阻应变片由敏感材料制作,测量力时三个方向力间的干扰难以解决,不易微型化。为了克服这些问题,使三维力觉传感技术能用于智能机器人分布式触觉传感系统中,研究者变更思路,从其他材料与原理入手,将聚偏二氟乙烯(PVDF)薄膜应用于三维力觉传感器中,采用压电效应,使三维力觉传感技术用于智能机器人分布式触觉传感器中成为可能。因为PVDF薄膜是一种压电高聚物材料,被认为是机器人用传感器的理想材料,具有耐磨、量轻、灵敏度高、声学阻抗低、价格便宜、频带宽,以及容易固定在复杂的表面等特点,因此基于PVDF薄膜所设计的三维力觉传感器易于微型化。
目前,国际上正在致力研究的机器人触觉-人工触觉皮肤,要求力觉传感器从其物理特性上应像人类皮肤,柔软而多功能化,并可粘贴安装在任何欲使用的载体表面,从而真正实现触觉的拟人化[5]。
4 六维应变片式力觉传感器
早在20世纪70年代,美国、日本就已经开展六维力觉传感器的研究并可以批量生产,而国内在80年代才开始研究,并在90年代末生产出达到国际同类产品水平的应变片式六维力觉传感器[6]。而且,随着桥路连接的不断优化,传感器的精度不断提高。
目前,我国许多设备中的应变片式传感器都是自主研发的,根据设备的不同工作环境使用不同力觉传感器,而市面上流通的应变片式力觉传感器大部分为筒式、柱式、环式、悬臂梁式、十字梁式及倒T形等[7],它们都是用应变片测量传感器内部结构的变化,从而表征外部的受力情况。
其中一种梁式传感器的创新之处就是将原来的十字梁转化为一种非径向式的三梁结构(见图3)。在受到外部力的作用时,它的非径向梁就会产生弹性形变,而应变片就贴在三根梁上,从而可以测量它的变化量。这样非径向式的三梁结构可以克服原来十字梁式传感器的径向效应。当受力与径向梁的方向相同时,该径向梁只会产生轴向应变,不会产生切向应变,但如果仅产生轴向应变,则该梁的相对两侧面形变相同,可以到检测电桥两嘴信号互相抵消,输出为零,即产生径向效应[8]。
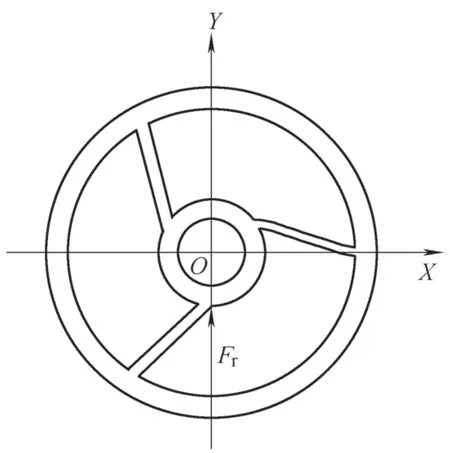
图3 非径向三梁结构
4.1 六维应变片式力觉传感器在医疗方面的应用
在医疗方面,六维力觉传感器的作用是非常强大的。现在新兴的虚拟手术领域也有利用到力觉传感器。由于在手术中,手术器械和人体组织的受力是在不断变化的,并且变化往往不会仅在某一个维度上,所以这属于空间力,这种力无法用一维的力觉传感器进行测量,从而衍生出多维力传感器作为测力元件,这也是为了使虚拟手术更加贴近最真实手术,从而拥有更好的教学能力。而在一种虚拟手术教学平台上,就是使用了一种十字梁式六维力觉传感器,其工作原理其实也是通过其自身内梁、外梁和过载保护梁的弹性形变来测量被测物体力的大小[9],从而进一步显示出手术刀的切割效果,并可以更加生动地表现出真实的手术场景[10]。除此之外,在微创手术方面,应变片式力觉传感器的应用也非常广泛。由于手术器械切割人体时的力是不确定的,所以刀刃上的受力很有可能是六维的。对于腹腔镜微创手术,有人设计了一种微型六维力觉传感器,这相当于两个普通的六维力觉传感器叠在一起,一层弹性体测量X轴、Y轴的力和Z轴的力矩,另一层测量Z轴的力和X轴、Y轴的力矩。每一根梁有4个应变片,这4个应变片组成一个全桥连接,从而每个全桥连接可以测得单维的力和力矩,并且每个电路之间不会有关联,这样良好的独立性会更加精确地测量这6个维度的变化。总的来讲,此传感器的灵感来源就是两个三维传感器可以制造一个六维传感器,然后将弹性体结构设计成可直接结构解耦的滑移十字梁结构,实现了测量力觉信息的无维间耦合,避免了复杂的计算解耦[11]。
4.2 六维应变片式力觉传感器在水下作业中的应用
发明机器人的一个目的就是使其可以代替人类探索一些人类无法直接接触或者无法到达的地方,或者人类自行探索会有危险的地方。在水下作业领域,其危险性推动了水下机器人的发展,而水下机器人的重要部件就是水下灵巧手。因为水下作业的力是无法确定的,所以可以利用六维力觉传感器对其进行完全的检测。水下灵巧手第一个需要测量的就是手指力,因为在水下工作时手指力会直接影响系统的整体性能和工作效果。目前,出现了一种圆盘式和十字梁式传感器共同作用的力觉传感器。这个新型传感器的设计思路也是两个三维传感器合成出一个六维传感器,上半部分为一个改进后的十字梁式力觉传感器,下半部分为一个圆盘结构。它采用应变片对称分布,连接全桥,实现四臂差动,这样既将温度的影响进行了补偿,又实现了灵敏度和线性度的提高[12]。水下灵巧手除了需要对手指力进行测量,还需要对腕力进行测量。腕力测量主要是应用圆筒式传感器,它是将圆筒作为测量元件,用6组不同方向和角度组成的应变片组来测量六维的变化,每组应变片运用半桥连接检测。除此之外,此传感器还运用了冲油的方式,解决了传感器内外的压力平衡,对传感器进行了保护,为此灵巧手更能适应水下作业环境[13]。
总的来说,无论是哪一种应变片式六维力觉传感器,它最主要的就是应变片的布置问题,贴片的绝对位置和绝对角度的偏差会对传感器的输出造成极大影响。贴片的相对位置、相对角度偏差和贴片高度问题对传感器的输出影响较小,并且应变片在不同载荷下的检测结果依旧可靠,对传感器抗偏心和倾斜载荷能力具有一定的提高作用[14]。因此,由于应变片的性质,可以在一定程度上提高传感器的性能,所以应变片式力觉传感器是现在力觉传感器的市场主流。
5 结束语
为了推动制造业转型升级,我国提出重点发展新一代信息技术、高档数控机床和机器人、航空航天装备、海洋工程装备及高技术船舶、先进轨道交通装备、节能和新能源汽车、电力装备、新材料、生物医药及高性能医疗器械、农业机械装备等十大领域。在这些领域中,可以将应变片式力觉传感器在大型设备和精密仪器上加以应用,及时地获取信息,将其反馈到相对应的监测系统,为之后相应的人为干预提供数据支持。