基于贪心策略的电动车AMT 换挡点实时优化方法研究
2022-08-31雷雨龙侯博宁付尧李兴忠李宇奇
雷雨龙,侯博宁,付尧,李兴忠,李宇奇
(吉林大学 汽车仿真与控制国家重点实验室, 吉林, 长春 130022)
电动汽车是我国战略性新兴产业之一[1],多挡化自动变速器可有效改善电动汽车整车动力性与经济性. 机械式自动变速器(AMT)以其传动效率高、结构简单等技术特点成为电动汽车动力传动系统的重要选择之一. 挡位决策是自动变速控制系统的核心技术,换挡点的优劣会直接影响整车性能.
目前工程化中所采用换挡规律MAP 具有求解简单、在线计算量小等优点,但理论计算的换挡点基于静态工况求解,在实车工况下存在适应性不佳的问题[2],且换挡点的标定需经大量的实车路试,开发周期长、成本高. 另一方面,目前换挡规律在多变的工况下无法实现换挡点的量化求解,无法保证换挡点局部最优性. 基于优化方法的换挡点优化控制方法成为可行技术途径,KIM 等[3]通过DP 算法对换挡MAP 进行求解,在不损失动力性的情况下,提高了汽车的经济性,实现了控制系统全局优化. 为了解决基于BP 算法优化换挡点带来的频繁换挡的问题,刘海鸥等[4]通过增加惩罚因子,BRANIMIR 等[5]通过增加离合器摩擦损失,ZHOU 等[6]通过限制换挡最小时间间隔,改进换挡规律的平顺性. GUO 等[7]基于模型预测控制基本原理,通过构建特定优化问题,利用极小值原理和数值求解算法,完成车辆挡位的在线优化;NGO[8]通过结合动态规划与极小值原理,能够得到与全局优化算法接近的控制效果;HELLSTRÖM等[9]利用车载导航系统的地理信息,通过滚动求解最优问题能够实现车辆挡位的实时控制. SAINI等[10]利用遗传算法,对多目标优化问题进行求解,能够通过调整不同目标的权重得到不同的控制效果.目前研究多集中于换挡点优化方法方面,所用方法以动态规划、模型预测控制为主,存在计算大、算法复杂度高、在线求解困难等问题,此外现有研究中多将工况信息作为已知输入条件,对于整个换挡点优化控制架构而言,工况预测部分的研究有待深入.
本文提出了一种基于贪心策略的换挡点优化控制架构,首先基于车辆行驶状态的无后效性与随机性,利用马尔可夫模型对汽车行驶工况进行预测,将预测车速信息作为输入,基于贪心策略合理规划预测车速工况下的换挡点,并结合仿真模型分析、验证了方法的有效性. 此控制架构通过结合马尔可夫模型与局部最优解求解方法,减少了汽车所需采集的行驶状态参数,降低了算法的复杂度,完成了车辆换挡的实时求解,并能够通过调整不同目标的权重系数,以达到不同的控制效果.
1 基于马尔可夫原理的行驶工况预测
1.1 车辆行驶工况马尔可夫链的构建
马尔可夫过程是一种典型的随机过程,在此过程中,未来的状态只取决于现在的状态,而与过去的状态无关. 车辆行驶过程中,其行驶状态具有随机性以及强无后效性,符合马尔可夫过程. 同时,在汽车的行驶过程中,行驶状态是随时间的变化而变化的,因此,如果对时间离散化,使时间离散连续,则汽车的行驶工况也可以视为一个离散且连续的状态序列. 因此,可以运用马尔可夫链对汽车的行驶工况进行预测[11].
在模型的构建过程中,以1 s 为采样时间,并将汽车的行驶状态进行离散化,由于车辆行驶状态与车速、加速度高度相关,因此利用离散化的车速与加速度表示车辆的当前状态,通过计算车辆当前状态转移到下一时刻状态的概率,得到状态转移矩阵,构建出汽车行驶的马尔可夫链.
令汽车在不同场合行驶,构建测试集. 以5 s 为采样时间,设置预测时长为5 s,预测车辆的行驶状态,得到汽车车速、加速度预测曲线与真实参数曲线对比图分别如图1、图2 所示.
图1 电动汽车车速对比图Fig. 1 Comparison diagram of electric vehicle speed
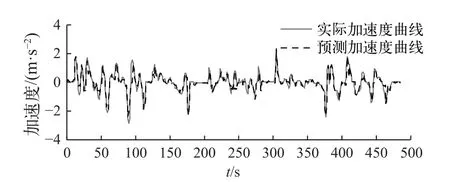
图2 电动汽车加速度对比图Fig. 2 Comparison diagram of electric vehicle acceleration
利用马尔可夫链的汽车行驶工况预测相关计算参数如表1 所示.

表1 速度-加速度状态转移矩阵预测参数Tab. 1 Prediction parameters of velocity and acceleration state transition matrix
运用双转移矩阵构建的马尔可夫状态预测模型,能够满足在汽车实时行驶过程中,对车速与加速度进行较为精确的预测,从而更精准地选择车辆行驶过程中的换挡点.
1.2 预测时域
预测时域对马尔可夫预测模型的构建至关重要. 预测时域小,可提高预测精度,但增加了计算量,不利于在线实时求解. 预测时域大,则计算量小,但预测精度下降,且无法及时反映车辆行驶过程中的扰动.
表2 为不同预测时域,利用马尔可夫预测模型所产生预测结果的相关参数. 通过分析发现,当预测时域超过4 s 时,预测失真次数明显增加,误差增加明显,而当预测时域小于4 s 时,预测失真次数变化不大. 综合权衡预测精度及预测速度,选定预测时域为4 s.
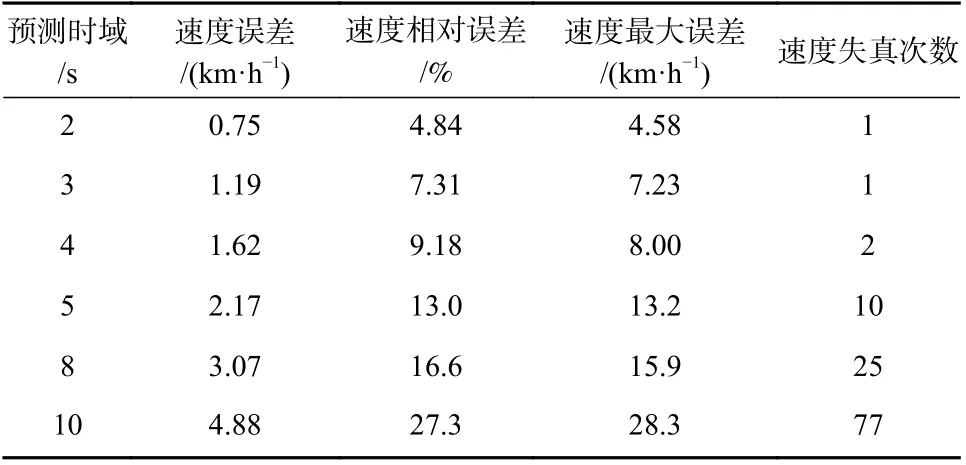
表2 不同预测时长下马尔可夫预测结果相关参数Tab. 2 Correlation parameters of Markov prediction results under different prediction duration
2 基于贪心策略的电动车AMT 换挡点优化
2.1 整车动力学模型构建
2.2 基于贪心策略的换挡点优化方法
由于车辆行驶过程中存在许多不确定因素,行驶经济性的全局最优解求解复杂,不仅需要大量计算,且无法预测各个工况的变化. 因此考虑将整个问题分解为各个子问题,在预测时域内求解挡位参数的最优解,得到局部最优解,并将所求解的局部最优解叠加起来,将其视为全局最优解,这种求解方法即为贪心算法. 由于贪心算法所求的最优解未必最优,所以贪心算法不需要回溯. 由于电机的工作消耗功率主要与车速、油门踏板开度以及挡位的传动比有关,根据最优解对车辆挡位进行控制,以改变传动系的传动比,完成AMT 换挡点的实时优化,从而在保证车辆动力性的前提下,提高车辆的经济性.
3 仿真结果分析
3.1 仿真验证环境
为了验证所设计的换挡策略是否有效,在Matlab/Simulink 中设计控制算法,利用仿真软件Cruise构建电动汽车模型,通过接口采集车辆反馈参数,由控制模块完成对换挡点的控制. 电动车辆主要参数如表3 所示,车辆模型如图3所示.
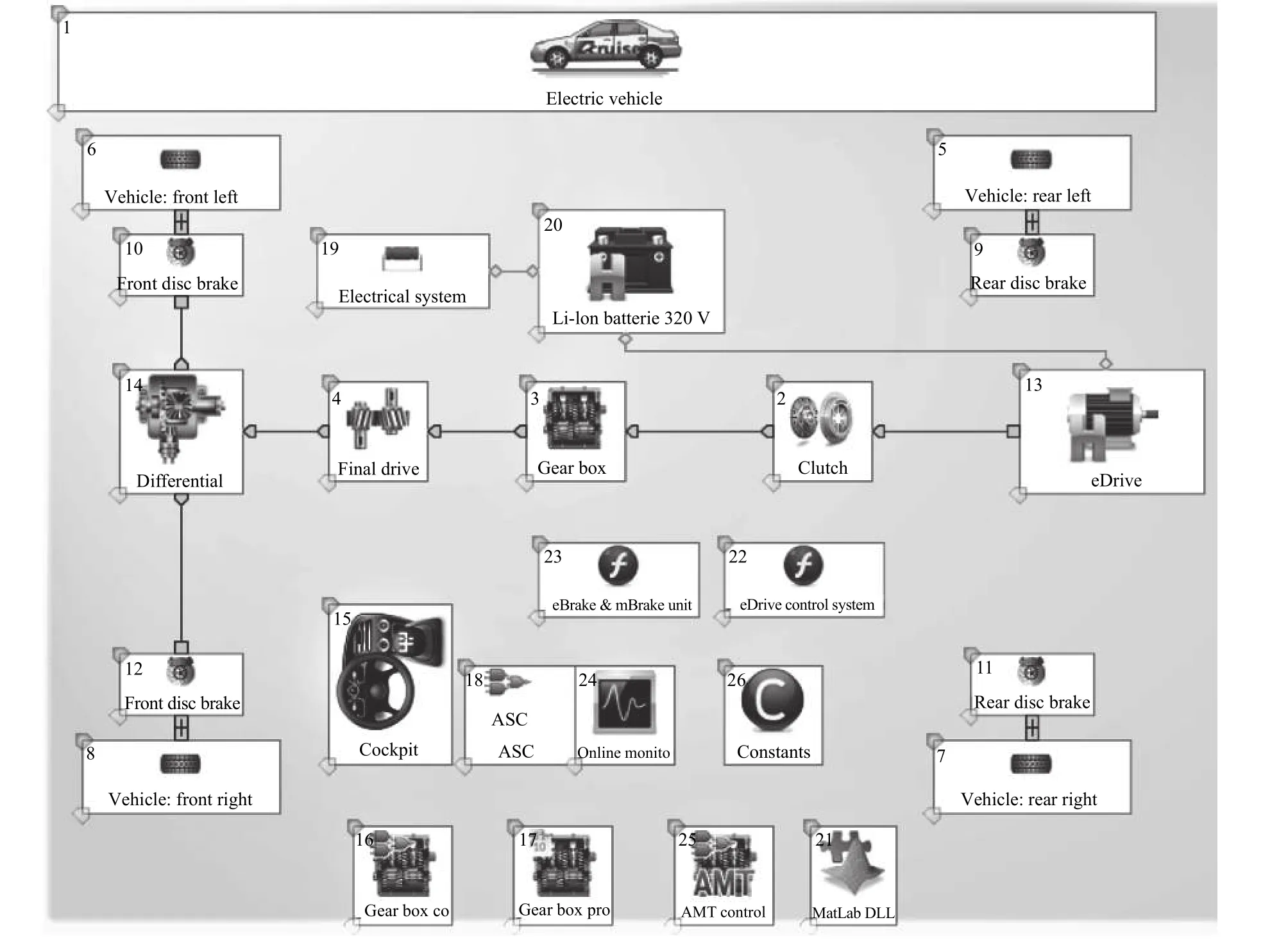
图3 Cruise 车辆模型Fig. 3 Cruise vehicle model
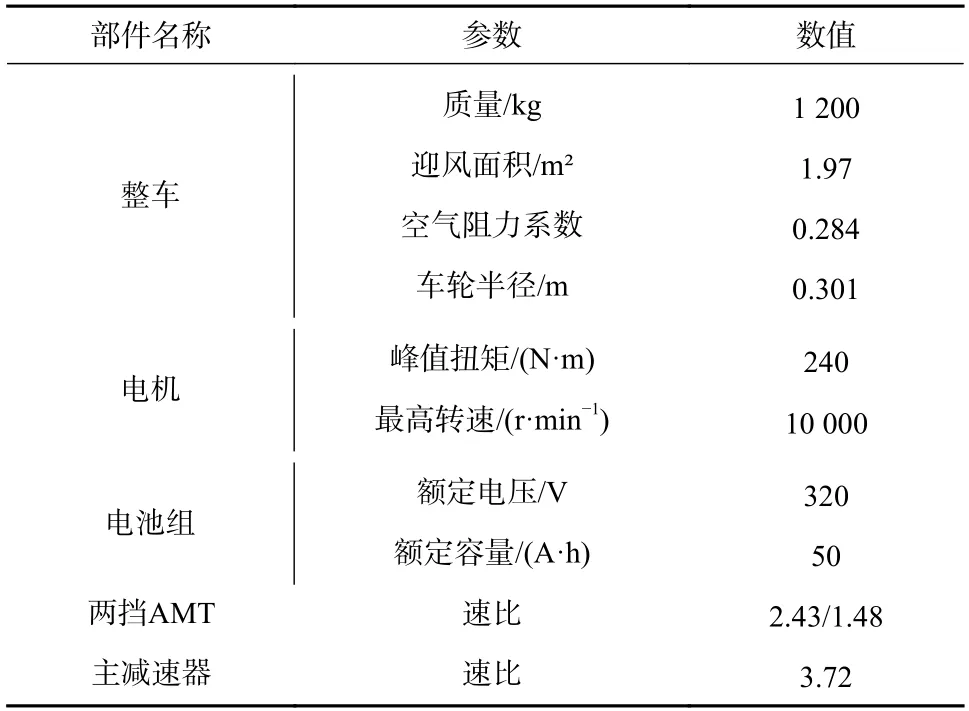
表3 电动汽车参数表Tab. 3 Electric vehicle parameters
3.2 仿真试验与结果分析
在WLTC 工况以及CATC 工况下,将装有基于马尔可夫工况预测的换挡控制器的车辆与采用经济性换挡策略的车辆进行对比(表4、表5),两种电动汽车的耗电量以及SOC 值对比如图4~图7 所示.

表4 WLTC 工况不同换挡策略性能对比Tab. 4 Performance comparison of different shift strategies under WLTC condition

表5 CATC 工况不同换挡策略性能对比Tab. 5 Performance comparison of different shift strategies under CATC condition
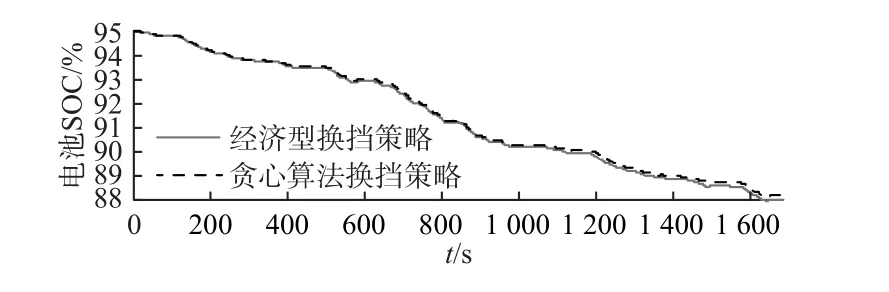
图4 WLTC 工况电池SOC 对比图Fig. 4 Comparison diagram of battery SOC under WLTC condition
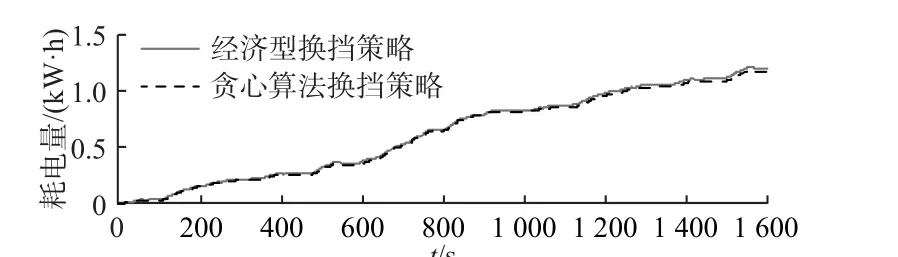
图5 WLTC 工况耗电量对比图Fig. 5 Comparison diagram of power consumption under WLTC condition
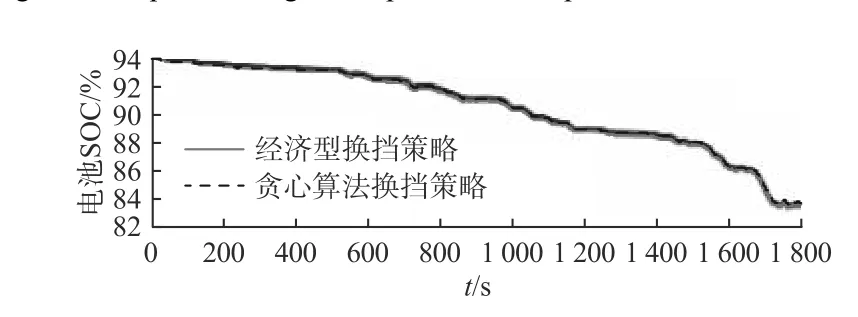
图6 CATC 工况电池SOC 对比图Fig. 6 Comparison diagram of battery SOC under CATC condition
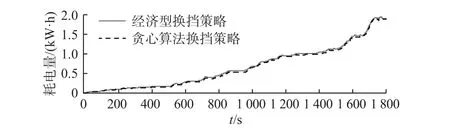
图7 CATC 工况耗电量对比图Fig. 7 Comparison diagram of power consumption under CATC condition
可以看出,采用基于预测换挡策略的电动车在WLTC 与CATC 两种工况下,相较于经济型换挡策略,其电池SOC 值下降相对缓慢,耗电量有所减少.
图8 与图9 分别为在WLTC 工况与CATC 工况下,采用贪心算法换挡策略与经济型换挡策略的车辆电机工作点对比图. 其中,空心点代表采用贪心算法换挡策略的车辆电机工作点,十字代表采用经济型换挡策略的车辆电机工作点. 在高速区,空心点相较于十字更加集中于电机的高效区,电机效率更高,车辆经济性更好. 而在低速区,由于换挡策略考虑了低速时的动力性要求,所以相对效率较低,但提供了更高的电机扭矩,保证了车辆的动力性.
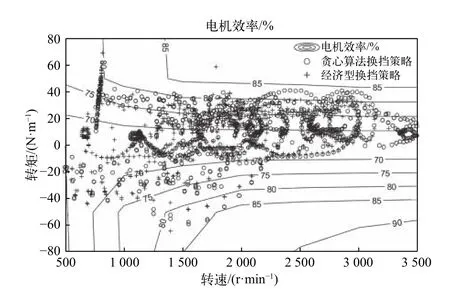
图8 WLTC 工况电机工作点Fig. 8 Motor operating point under WLTC condition
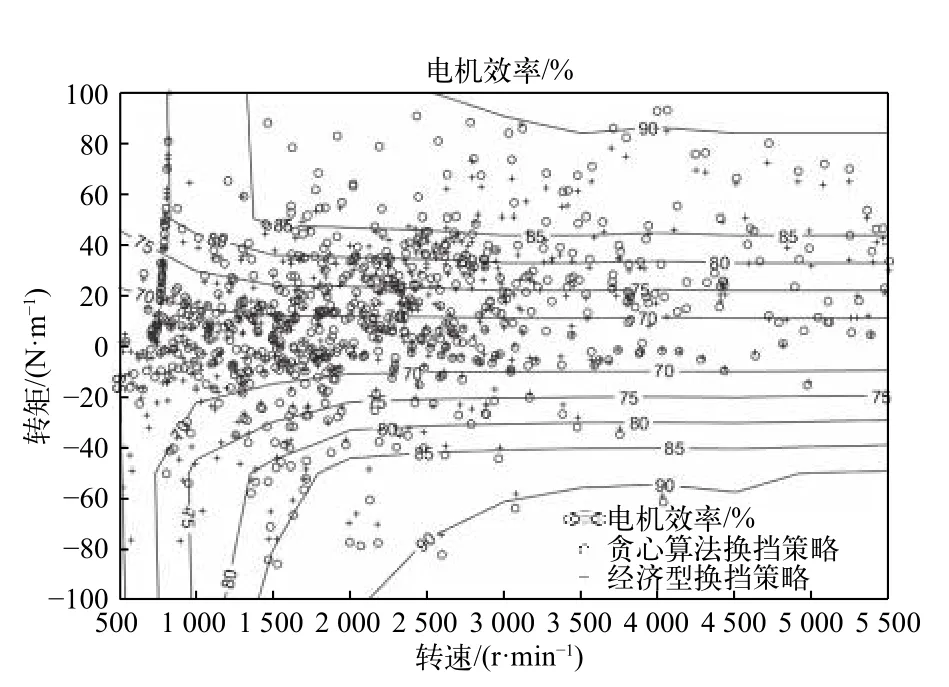
图9 CATC 工况电机工作点Fig. 9 Motor operating point under CATC condition
4 结 论
本文提出了一种基于贪心策略的电动汽车AMT换挡点实时优化控制方法,通过马尔可夫链实现对于电动汽车车速、加速度的预测,基于工况预测信息设计基于贪心策略的实时优化算法,构建了仿真分析模型,并进行了WLTC、CATC 工况仿真试验,试验结果验证了方法的有效性,实现基于工况预测信息下的换挡点量化求解,提升了整车性能.
