卷积神经网络表征可视化研究综述
2022-08-30司念文张文林罗向阳常禾雨
司念文 张文林 屈 丹 罗向阳 常禾雨 牛 铜
近年来,以深度神经网络(Deep neural networks,DNN)为代表的机器学习方法逐渐兴起[1].由于训练数据的增加[2-3]及计算能力的大幅提升,DNN 的网络结构及与之相适应的优化算法[4-6]变得更加复杂,DNN 在各项任务上的性能表现也越来越好,产生了多种适用于不同类型数据处理任务的经典深度网络结构,如卷积神经网络(Convolutional neural network,CNN)和循环神经网络(Recurrent neural network,RNN).对于图像数据处理与识别领域,CNN 是一种十分常用的网络结构,在图像分类、目标检测、语义分割等任务上取得了非常好的效果,已经成为该领域应用最广泛的基础模型[7].
如图1 所示,传统机器学习算法采用人工设计的特征集,按照专家经验和领域知识将其组织到机器学习算法中.由于设计人员本身了解这些被定义特征的具体含义,因此,传统机器学习方法一定程度上是可解释的,人们大致明白算法对各种特征的依赖以及算法的决策依据.例如,线性模型可使用特征对应的权重代表特征重要程度.相比于传统机器学习算法,以CNN 为代表的深度学习算法属于特征学习或表示学习,可对输入数据进行自动特征提取及分布式表示,解决了人工特征设计的难题.这一优势使其能够学习到更加丰富完备的且含有大量深层语义信息的特征及特征组合,因此在性能表现上超过多数传统机器学习算法.
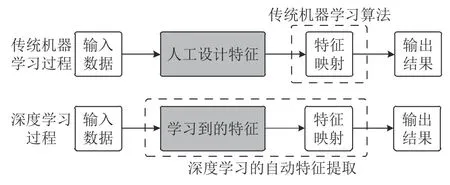
图1 传统机器学习与深度学习的学习过程对比[8]Fig.1 Comparison of the learning process between traditional machine learning and deep learning[8]
然而,CNN 这一优势的背后也存在着一定局限性.一方面,人们至今无法较好地理解CNN 内部知识表示及其准确的语义含义.即使是模型设计者也难以回答CNN 到底学习到了哪些特征、特征的具体组织形式以及不同特征的重要性度量等问题,导致CNN 模型的诊断与优化成为经验性、甚至盲目性的反复试探,这不仅影响了模型性能,还可能遗留潜在的漏洞;另一方面,基于CNN 模型的现实应用在日常中已经大量部署,如人脸识别、行人检测和场景分割等,但对于一些风险承受能力较低的特殊行业,如医疗、金融、交通、军事等领域,可解释性和透明性问题成为其拓展和深入的重大阻碍.这些领域对CNN 等深度学习模型有着强烈的现实需求,但受限于模型安全性与可解释性问题,目前仍无法大规模使用.模型在实际中可能犯一些常识性错误,且无法提供错误原因,导致人们难以信任其决策.
因此,对CNN 的理解和解释逐渐受到人们关注,研究者们尝试从不同角度出发,解释CNN 的特征编码和决策机制.表征可视化作为其中一种解释方法,采用基于特征重要性的解释思路,寻找输入变量、特征编码及输出结果之间的相关性,并以视觉展示的方式直观呈现,是一种较为直接的理解CNN 的途径.本文对该领域的现有研究进行了系统性整理和回顾,对其中涉及的相关概念及内容、典型方法、效果评估、应用等方面作了归纳总结,着重介绍了可视化方法的分类及算法的具体过程.最后,分析了该领域仍存在的难点并展望了未来研究趋势.
本文后续内容安排如下:第1 节简述了CNN表征可视化的相关概念和研究内容;第2 节梳理了现有的表征可视化方法,对其进行了分类整理;第3 节介绍了部分可视化效果评估方法;第4 节简要阐述了可视化方法在一些领域的应用;第5 节探讨了该领域仍存在的难点及未来的研究趋势;第6 节总结全文.
1 相关概念与研究内容
1.1 相关概念
1.1.1 CNN
目前,CNN 已成为基于深度学习的图像识别领域应用最广泛、效果最佳的网络结构.最早的CNN 由LeCun 等[9]于1998 年提出,用于手写体数字识别.CNN 的基本结构中含有输入层、卷积层、全连接层及输出层.其中输入层、全连接层、输出层与其他网络大致相同,仅卷积层是CNN 特有的结构.经典CNN 卷积层中含有卷积、激活和池化3 种操作:1)卷积操作使用多个卷积核(滤波器)在输入张量上平移作内积运算,得到对应的特征图.同层的不同卷积核用来提取不同模式的特征,不同层的卷积核则用来提取不同层级的特征.2)激活操作使用非线性激活函数处理卷积结果,用于提升网络的非线性特性,增强非线性拟合能力,常用的激活函数如tanh、sigmoid、rectified linear unit (ReLU)[6]和改进版[10-11]等.3)池化操作一般使用最大值池化和平均值池化,按照池化窗口处理整个窗口内的值,用于压缩参数和降低过拟合.
稀疏连接和权重共享是CNN 相对于前馈神经网络的主要特点.基于这些经典的CNN 结构及其特性,研究人员通过不断改进和优化[12],逐渐设计出结构更复杂且识别性能更优异的CNN,以在Imagenet Large Scale Visual Recognition Competition (ILSVRC)数据集[2]图像分类任务上的优胜CNN模型为例:
1)2012 年,Krizhevsky 等[1]提出了AlexNet,在图像分类任务上以巨大优势取得冠军,成功吸引了学术界的关注,成为新阶段CNN 兴起的标志.
2)2013 年,Zeiler 等[13]提出了ZFNet,利用反卷积可视化技术诊断AlexNet 的内部表征,然后对其针对性地做了改进,使用较小的卷积核和步长,从而提升了性能.
3)2014 年,谷歌公司Szegedy 等[14]提出了GoogLeNet,核心是其中的Inception 模块,使用了不同尺寸的卷积核进行多尺度的特征提取和融合,从而更好地表征图像.同年,牛津大学的Simonyan等[15]提出了视觉几何组网络(Visual geometry group network,VGGNet),仅使用2×2 和3×3两种典型的卷积核,通过简单地增加层的深度实现了性能提升.
4)2015 年,微软公司He 等[16]提出了残差网络(Residual networks,ResNet),使用残差连接实现跨层的信息传播,缓解了之前由于深度增加引起的梯度消失问题,并以3.57%的错误率首次超越人类水平.
5)2016 年,Huang 等[17]提出了DenseNet,相比于ResNet,使用了密集连接操作,强化特征的传播和复用.
6)2017 年,Hu 等[18]提出了压缩激励网络(Squeeze-and-excitation networks,SENet),通过特征图各通道间的权值自适应再调整,实现各个通道之间的特征重标定,提升了网络的特征提取能力.
CNN 在图像数据处理上有天然的优势,因而在图像分类、目标检测、语义分割和场景识别等领域应用广泛,在其他模态的数据如视频、语音和文本等领域也有较多应用.图像分类是CNN 最典型的应用领域,许多图像分类系统使用预训练的CNN进行部署.预训练的CNN 是指已经在某个数据集上完成训练的CNN 模型.一般情况下,预训练的CNN由研究人员设计并调整至最佳状态,在实际场景中可以直接使用而无需再训练.由于预训练CNN 模型在现实中经常使用,因此,针对预训练CNN 模型的理解和解释是可解释性研究中的一项重要内容.
1.1.2 可解释性
可解释性是近年来深度学习领域的研究热点.可解释性与可理解性的含义并不相同[19-20],文献[19]从CNN 特征表示形式的角度出发,对CNN 的“可解释性”和“可理解性”做了区分:可解释性表示从抽象概念(向量空间、非结构化特征空间)到人类可理解的领域(图像和文字等)的映射,而可理解性表示可解释域内促使模型产生特定决策的一组特征.从这种区分看,“可解释性”研究重点在于将参数化形式表示的特征映射到人类可直观感受的表示形式,而“可理解性”侧重在人类可理解的领域中寻找与模型某个决策相关的具体特征.也就是说,“解释”是一种从不可解释域到可解释域的映射动作,“理解”则是一种在可解释域内寻找感兴趣证据的过程.麻省理工的研究人员认为[20],通过“解释”能够实现对深度网络的“理解”,可解释性的研究目标是以某种人类可理解的方式描述一个系统的内部机制.同时,将可解释性的研究内容分为DNN 处理过程的理解、DNN 内部表征的理解和自解释的DNN 三个方面.
深度学习可解释性的研究内容非常丰富,本文从可解释性研究的模型对象出发,根据待解释的目标模型是否已经完成训练,将深度学习可解释性研究划分为两部分:事后解释和自解释模型,如图2所示[21].
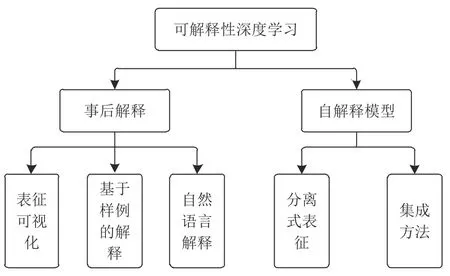
图2 可解释性深度学习的研究内容划分Fig.2 The division of the research content of the interpretable deep learning
事后解释是对预训练模型的解释.现实中,由于模型已经完成训练和部署,而重新训练模型耗费的时间和资源成本过大,因此不具备重新训练的可能性.针对这种模型的解释,需要在不修改模型自身结构及参数的情况下完成,结合预训练模型的输入、中间层参数和输出等信息,实现对模型内部表征及决策结果的解释.
对于预训练模型的事后解释方法,现有研究主要分为以下3 类:
1)表征可视化.表征可视化是一种基于特征重要性的解释方法,主要研究模型内部的特征表示及这些特征与模型输入、输出之间的关系.梯度归因方法[22-23]是最具代表性的表征可视化方法,使用输入空间中像素自身的梯度(或绝对值、平方等)来衡量该像素与预测结果的关联程度.表征可视化与模型结构可视化不同,前者重在研究模型内部特征(以参数的形式)的语义理解,以及输入、特征编码及输出之间的因果关系,后者研究模型结构、数据流向及形状的变化.
2)基于样例的解释.基于样例的解释是一种基于样本重要性的解释方法,采用训练数据中的样本原型作为当前决策结果的解释[24-25].这种方法模拟人对事物的解释过程[26],从数据集中已有样本(已经学习过)中找到相似样本,作为对新的样本预测结果的比较.
3)自然语言解释.自然语言解释以人类可理解的自然语言形式,对CNN 识别结果进行解释[27].该过程中,需要将CNN 的图像特征编码映射为RNN的自然语言特征编码,通过跨模态的表征融合来生成用于解释CNN 输入与输出的自然语言.该过程与图像描述[28]和视觉问答[29]相似.
自解释模型不同于事后解释,其在模型设计时即考虑了内在可解释性,在此基础上进行训练和优化,形成结构上或逻辑上具有内生可解释性的模型.自解释模型能够在应用的同时由其自身为用户提供对输出结果的解释.
对于建立具有自身可解释性的模型,现有研究主要分为以下2 类:
1)分离式表征:在模型结构或优化过程中添加一些约束,以降低模型复杂性,同时保证模型的性能,使模型内部的表征分离可理解.例如,Zhang等[30]对滤波器的学习进行约束,训练出可解释的滤波器,使每个滤波器有针对性地关注特定目标部位.
2)集成方法:结合传统可解释性较好的机器学习方法,构建在深度神经网络的识别性能和传统方法的可解释性之间折衷的新模型.例如,将神经网络集成到决策树算法中,使用神经网络提取的特征作为输入,这样训练得到的模型同时具有两者的优点,可实现决策路径的清晰可理解[31].
1.1.3 表征可视化
表征可视化是一种事后解释方法,通常以视觉的方式对CNN 内部表征和输出决策进行解释.表征可视化尝试解释CNN 内部特征的表示形式、输入—内部特征—输出三者之间的关系、促使网络做出当前预测的输入等问题。与其他方法相比,表征可视化方法具有以下优点:1)简单直观,从视觉上为用户提供观察.2)便于深度分析网络表征,诊断训练效果,进而改进网络结构设计.3)无需修改模型结构,多数表征可视化方法可在模型完成训练之后进行特征分析与决策结果解释,无需修改或重新训练模型.表征可视化方法生成的解释结果以热力图的方式呈现.热力图是一个由不同颜色强度构成的图像,像素颜色的强度与其重要性相对应.从数学角度看,热力图实际上是一组与输入变量对应的重要性值(或相关性值)的集合,集合中的每个元素值表示其对应的输入变量与输出结果之间的相关性.
1)CNN 表征可视化
表征可视化过程与CNN 预测过程相互依赖,如图3 所示.图3 上方为CNN 预测过程,下方为可视化方法的解释过程,箭头表示这两个过程中各阶段之间的相互关系.

图3 CNN 表征可视化的研究思路Fig.3 The research idea of CNN representation visualization
CNN 预测过程:实现从输入变量到输出预测的映射.其中,输入变量对应的输入空间被认为是人类可理解的空间(例如图像和语言文本),而特征编码对应的特征空间经过了CNN 的自动特征提取与特征组合.可视化解释CNN 的目的就是将中间层特征编码和输出层预测结果反向映射到输入空间,实现不可解释域向可解释域的映射.
可视化方法的解释过程涉及3 种:1)解释内部特征:研究黑盒中间编码了哪些知识,以怎样的形式组织这些知识的.2)决策与特征关联:研究中间层的知识与输出预测之间的关系.3)解释输入—输出关系:研究输入变量、中间层特征编码和输出预测三者之间的关系.
2)CNN、RNN 和生成对抗网络表征可视化的比较
CNN 在图像数据处理领域应用较为广泛,层次化的表征方式使其适用于图像数据逐层学习的特性,与人类非常相似.因此,CNN 表征可视化主要研究各个隐含层所编码的特征、这些特征的语义含义及与输入输出之间的关系.对于另外两种常见的DNN:循环神经网络(RNN)与生成对抗网络(Generative adversarial network,GAN),表征可视化研究的关注点略有不同.
RNN 是一种随时间步迭代的深度网络,有长短时记忆网络、门控循环单元等扩展版结构,擅长处理时序型数据,在自然语言处理领域应用广泛.RNN 的主要特点在于其迭代式的处理数据,这些迭代信息存储于网络结构中的隐状态中,每个时间步的隐状态含义不同,RNN 的长距离依赖关系学习能力也在于这些隐状态的学习效果.因此,RNN可视化研究多专注于对这些隐藏状态的理解与解释.例如,文献[32]可视化RNN 的隐状态对于输入的预期响应,用于观察RNN 内部的正面与负面输入时的激活分布.文献[33]开发了一个长短时记忆网络可视化工具,用于了解这些隐藏状态的动力学过程.文献[34]通过可视化的方式解释了长短时记忆网络在长距离依赖关系学习上的优势.此外,一些图像领域常用的表征可视化方法如层级相关性反馈(Layer-wise relevance propagation,LRP)方法,也被用于解释RNN 的表征及量化输入—输出之间的关系[35-36].
GAN 是一种生成式神经网络,由生成器和判别器两部分构成,二者之间通过对抗学习的方式互相提升性能[37].从结构上看,GAN 的生成器一般使用反卷积结构,判别器可视为一个CNN 结构.由于GAN 主要用于学习数据的潜在分布,然后用于生成式任务,因此,GAN 可视化的关注点主要在于生成器部分.更具体地,在于理解和解释生成器隐变量的作用.典型的如InfoGAN[38],对输入向量进行分解,使其转为可解释的隐变量及不可压缩的噪声,进而约束隐变量与输出之间的关系,从而学习可解释的特征表达.文献[39]和文献[40]通过操纵生成器的隐变量来观察生成结果的变化情况,进而理解GAN 的过程.文献[41]专门研究了GAN 隐空间的语义解纠缠问题,提出了一种效果较好的人脸编辑方法,可通过编辑GAN 的隐空间来调整生成人脸的属性,如姿势、性别和年龄等.
1.2 研究内容
本文梳理了CNN 表征可视化的研究内容,如图4 所示,主要分为以下3 个方面:
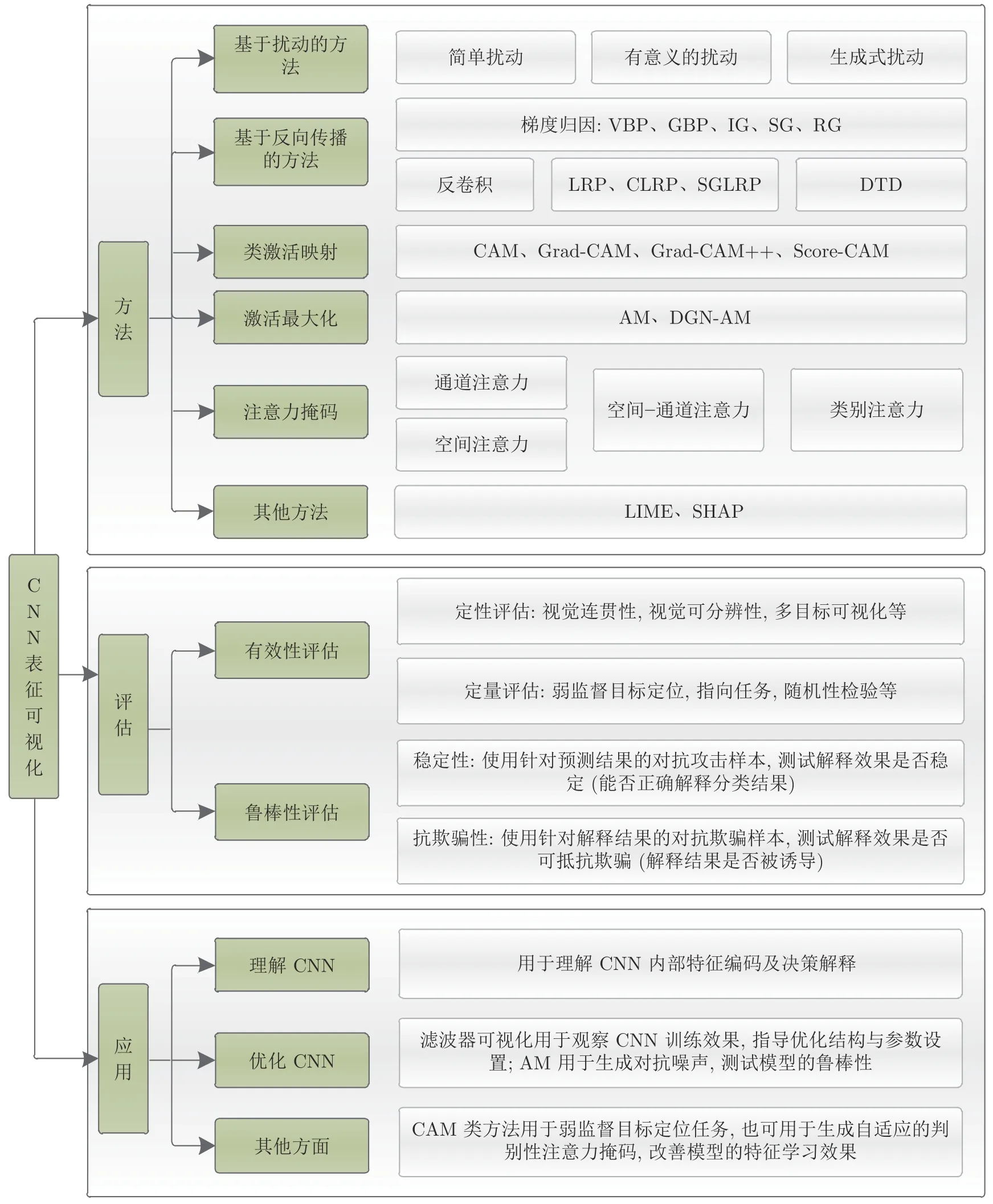
图4 CNN 表征可视化的研究内容Fig.4 Research content of the CNN representation visualization
1)可视化方法.从不同的目标模型和解释需求出发,研究不同侧重点的表征可视化方法,从而提升可视化解释的效果.
2)可视化效果的评估.研究可视化效果的评估方法,主要从两个方面展开:有效性评估和鲁棒性评估.有效性评估用于评价可视化方法的解释效果,分别从定性和定量的角度进行度量.鲁棒性评估用于评价可视化方法在对抗性输入的作用下能否有效地提供合理的解释.
3)可视化的应用.研究可视化方法在相关领域的应用,根据不同可视化方法的特点为其选择合适的应用场景,例如用于诊断网络缺陷、为模型提供面向重要特征的注意力机制、用于弱监督目标定位任务等.
2 可视化方法
2.1 方法分类
根据可视化方法的算法原理,可归纳为6 种主要类型:基于扰动的方法、基于反向传播的方法、类激活映射、激活最大化、注意力掩码和其他方法.下面分别对每类方法进行介绍.
2.1.1 基于扰动的方法
基于扰动的可视化类似于一种因果过程,通过修改输入(原因)观察输出(结果)的变化情况,从而确定被修改的输入对于输出的影响大小.如图5所示,考虑输入图像x∈Rd,分类器f,输出结果为f(x)∈Rn,其中类别c的Softmax 分数为fc(x).扰动方法研究使用删除、遮挡、模糊等方式处理x的最小区域,观察fc(x)的变化.若fc(x)下降较大,则被遮挡区域对fc(x)影响较大,重要性也较大.
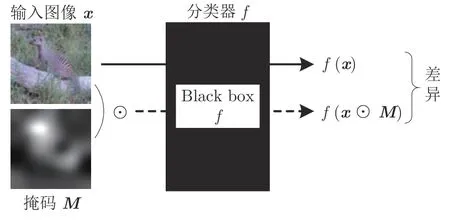
图5 基于扰动的方法的解释流程Fig.5 Interpretation process of the perturbation based method
典型的扰动方式分为以下3 种:
1)简单扰动.文献[13] 使用固定尺寸的像素块(如2×2),按照从左到向、从上到下的顺序依次遮挡图像的各区域,观察各遮挡后图像的预测结果.针对特定预测类别,分数下降越大,表明此时被遮挡区域对于该类别越重要,从而形成基于像素块重要性的显著图.文献[42]认为使用随机值作为遮挡模块的填充像素更合理,而不应仅使用灰色像素.文献[43]使用蒙特卡洛抽样产生多个扰动掩码Mi用于遮挡图像(见图6),利用f对扰动图像x⊙Mi进行分类,从而得到置信度向量,表示该掩码与各个类别的关联度大小.最后,使用类别对应的置信度对各掩码作线性加权,得到最终的掩码.

图6 使用随机采样产生扰动掩码的过程[43]Fig.6 The process of generating a perturbation mask using random sampling[43]
2)有意义的扰动.文献[44]认为用于遮挡图像的掩码是可以学习的,而不需要使用简单的平移或随机等方式盲目的遮挡.使用优化思想学习到的像素级扰动掩码有明确的含义,可以更有效地遮挡重要像素,使用的扰动方式如下[44]:
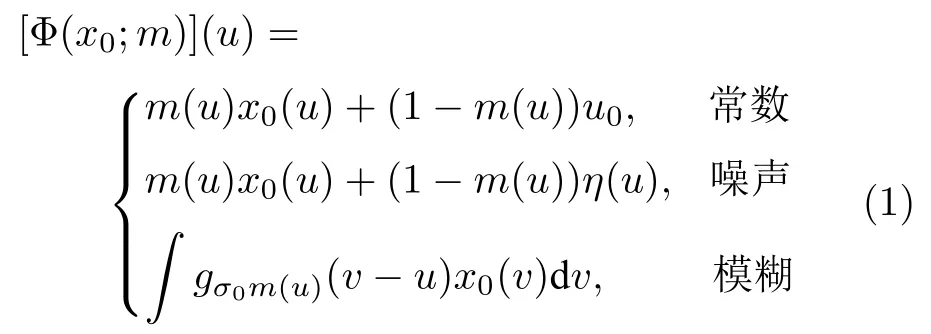
式中,x0(u)表示输入图像(自变量为元素位置u),m(u)表示掩码.第1 种使用常数扰动,u0表示色彩均值;第2 种使用噪声扰动,η(u)表示高斯噪声;第3 种使用模糊扰动,σ0表示高斯模糊核gσ的标准差.定义目标函数如下:

使用优化方式学习到的扰动掩码,对于指定的目标类别,可以使掩码遮挡后的图像的预测分类达到局部最低,即表示掩码有效遮挡了图像中最重要的区域.该式同时使用L1 范数约束掩码,使扰动区域尽可能小,以实现扰动最少最关键像素的目的.
3)生成式扰动.文献[45]和文献[46]使用生成模型扰动输入特征,得到视觉上更加自然的扰动图像.如图7(d)所示,与图7(b)模糊、图7(c)灰度化仍保留着目标轮廓相比,生成式模型修复的图7(d)在目标位置插入与环境一致的平滑像素特征,可使扰动图像在视觉上仍然是一张自然图像,而非经过了明显地遮挡.

图7 使用生成式模型生成扰动[45] ((a)原图,(b)模糊;(c)灰度;(d)生成扰动;(e)随机噪声)Fig.7 Using generative models to generate perturbation[45] ((a)Original image;(b)Blur;(c)Gray;(d)Generated perturbation;(e)Random noise)
此外,还有极值扰动[47]和对抗性扰动[48]等方法.总体来看,简单扰动方法将目标网络当作黑盒,仅需获取其“输入-输出”对,无需接触网络权重与中间层激活,解释过程所需的资源较少,但其解释效果欠佳.更复杂的扰动方法则需要多次优化迭代,所需时间较长.
2.1.2 基于反向传播的方法
基于反向传播的方法根据所设计的反向传播规则,将网络输出层预测值逐层分解并传播到输入空间,从而确定输入-输出之间的相关性.输出层信息回传过程中,利用模型权重参数作为引导,结合网络中神经元的正向激活值,进行逐层反向计算,直到输入空间,为每个变量(或一组变量)分配与输出预测相关的贡献值.
图8 描述了基于反向传播的可视化方法的解释流程.对于输入图像x={x1,···,xd},d表示输入图像对应矢量的维度,xi表示该矢量的第i(1≤i≤d)维.设目标网络为f,解释方法为g,解释过程可形式化为:
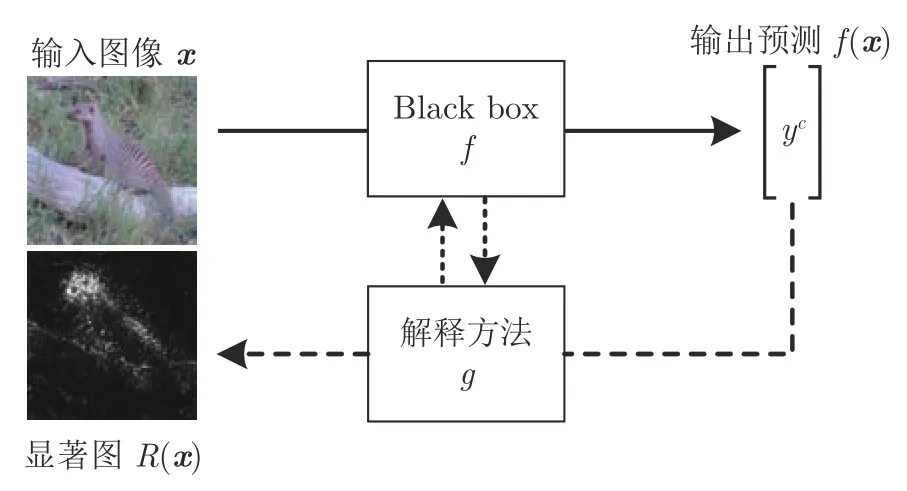
图8 基于反向传播的方法的解释流程Fig.8 Interpretation process of the backpropagation based method

式中,R(xi)表示输入的第i维元素与输出预测f(x)之间的相关性值.
2.1.2.1 梯度方法及其变种
1)普通反向传播(Vanilla backpropagation,VBP).文献[22]和文献[23]提出最简单的基于梯度的可视化方法,使用网络输出得分的输入空间中数据点的导数,表示该点与输出结果之间的相关性大小,形式化如下:

式中,x表示输入图像,fc(x)表示对x的预测类别c的得分.如图9 所示,表示在AlexNet[1]上使用VBP 方法进行可视化的过程.其中,C 表示卷积层,FC 表示全连接层.
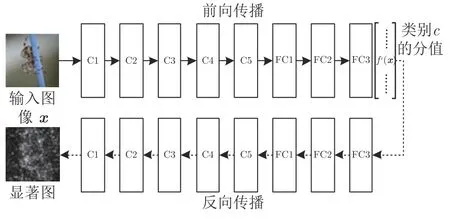
图9 VBP 方法的过程[49]Fig.9 The process of the VBP method[49]
VBP 方法的反向传播过程基于链式法则进行,由输入图像的梯度构成显著图,显著图中较亮位置的梯度绝对值也越大,这些突出位置显示了与模型输出结果相关的输入特征,且相关性越高则显著图中对应特征越明显.直观理解,梯度表示模型训练中参数的更新量,数据点的梯度越大表示输出对该点的变化越敏感,则该点与输出的相关性也越大.因此,这种方法也称作灵敏度分析方法,用于分析输出结果对输入特征的变化量的敏感程度.初始得到的显著图,通过取绝对值或取平方等后处理策略,使热力图中显著性区域更加集中,散点噪声更少.
2)导向反向传播(Guided backpropagation,GBP).VBP 方法基于普通的梯度反向传播,依靠网络自身反向传播所产生的梯度,仅对最终的梯度图进行后处理,而未对反向传播过程作任何更改.GBP方法[50]与其略有不同,它对反向传播中每个卷积层的梯度都进行负值过滤,使负值调整为0,即使网络中间有ReLU 层,也会对其梯度再进行一次ReLU过滤.这样做的目的是仅保留与网络输出正相关的梯度,去掉负相关的梯度.
VBP 和GBP 是2 种最简单的梯度方法,但由于深层网络的梯度传播过程中的问题,导致这两种方法也含有一定的局限性,体现在以下3 个方面:
1)梯度消失.随着反向传播过程层数的增加,梯度分布越来越稀疏,再加上一些梯度过滤措施,导致显著图愈发不明显.该问题在很多深层网络中尤其突出.
2)梯度不能完全反映输入特征的重要性.梯度用于表示对应点的变化量对输出的影响,但不一定可以解释该点自身对输出的贡献.例如,沿着梯度下降方向改变(增加/减小)该点的数值能够使输出结果分值更高,但并不表示该点自身对输出有较大影响.因此,梯度方法并不能完全理解为能够解释CNN 的分类结果,仅能解释怎样改变输入可使该分类结果的置信度更高.
如图10 所示,左侧表示输入图像,右侧表示显著图的解释结果.在第1 行中,梯度突出的区域偏向左上方,表明该区域对“reflex camera”标签更重要,而原图中对应区域并没有实际含义.在第2 行中,去除这部分区域后,在预测类别不变且置信度增加的情形下,梯度突出的区域却发生了改变.从中可以看出,对于一些特殊的图像,梯度自身能否表明像素重要性值得怀疑.
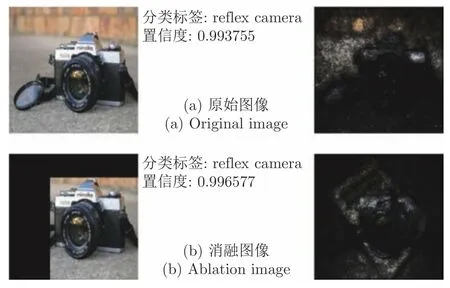
图10 梯度不稳定导致解释结果的不确定性[51]Fig.10 Uncertainty of interpretation results due to gradient instability[51]
3)梯度噪声.梯度对应的显著图中,散点噪声较多,只能从整体上观察显著图中较模糊的目标信息.目前的研究对这些噪声的出现作了一些假设,但仍有待进一步探讨.图11 表明了梯度显著图的噪声问题,与给定的边框相比,显著图中高亮区域含有较多的框外散点噪声.

图11 梯度方法产生的显著图含有大量噪声[44]Fig.11 The saliency map generated by the gradient method contains a lot of noise[44]
尽管如此,基于梯度的显著图可视化仍有一些有益的作用,是一种能够有效辅助理解CNN 的方法.针对上述问题,一些研究尝试使用新的方法对梯度反向传播规则或梯度图自身进行处理,以提升梯度显著图的可视化效果,形成像素区域更加集中的和连续的梯度图.这些研究包含以下几项:
1)平滑梯度.Smilkov 等[52]对梯度图中噪声出现的原因作了假设,认为这些噪声是由神经网络学习到的得分函数的不平滑性引起的,噪声即是一些变量的梯度对应的没有实际含义的局部变化.ReLU激活函数就是一种典型的不平滑激活函数.图12表示在不改变图像的视觉效果与分类结果的情况下,对单个输入像素添加细微扰动,扰动率(横轴)的增加引起的该像素各通道的梯度值(纵轴)的变化.可以看出,像素梯度变化对像素的改变具有较大敏感性,尽管这种改变并不一定具有实际含义.
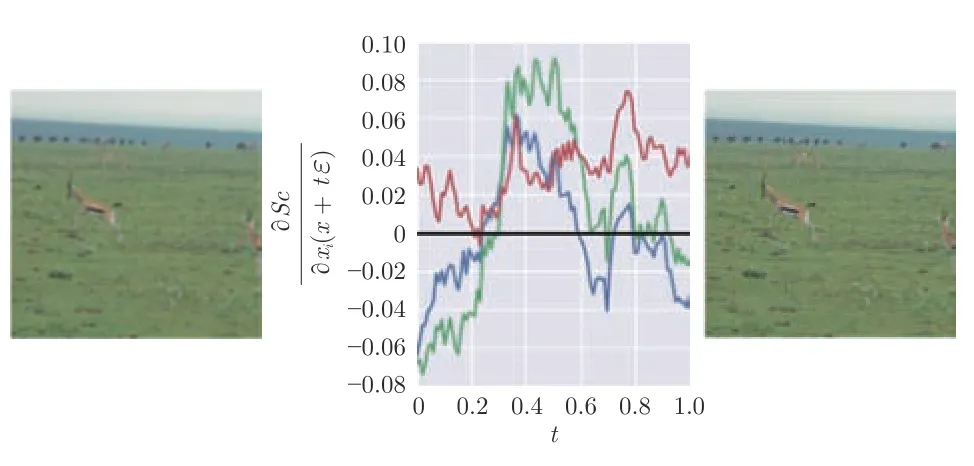
图12 单个像素的梯度值的不稳定性[52]Fig.12 The instability of the gradient value of a single pixel[52]
梯度的不稳定特性是“平滑梯度”方法提出的依据,通过为输入图像添加采样自高斯分布的噪声,对每次生成的梯度图叠加后再平均,实现对梯度图的平滑与去噪.具体地,对于输入图像x,添加服从高斯分布ε~N(0,σ2)的噪声,形成在视觉上无明显变化的N张带噪声图像x+ε,然后对这些图像生成的梯度图加以平均,得到最终的显著图.这样通过多个显著图平均化的方式实现图像的平滑,从而去除显著图中存在的噪声,得到更好的可视化效果.
2)积分梯度[53].将输入图像从某个初始值(例如0)开始,按照一定比例放大到当前值.将中间过程中的每个输入对应的显著图进行平均,得到最终的显著图.
3)整流梯度.Kim 等[54]深入对比了现有的梯度反向传播方法,并提出假设认为,由于CNN 在前向传播中本身含有噪声,导致反向传播中相应元素位置会出现梯度噪声.为了处理掉显著图中的噪声,通过设置适当的阈值,使重要性分数超过该阈值的神经元的梯度才会被反向传播,从而过滤非重要的特征.
此外,文献[55]还提供了梯度归因方法的比较基准.文献[56]对几种基于梯度的可视化方法的效果作了详细对比,引入了一种量化评价标准sensitivity-n统一进行度量.文献[57]采用聚合的思路,对几种方法的结果进行聚合,实现更加稳定的解释.总体来看,梯度方法及其变种主要依靠基于梯度的反向传播实现解释过程,各种方法在传播规则上略有不同,表1 对比了各方法的特点.
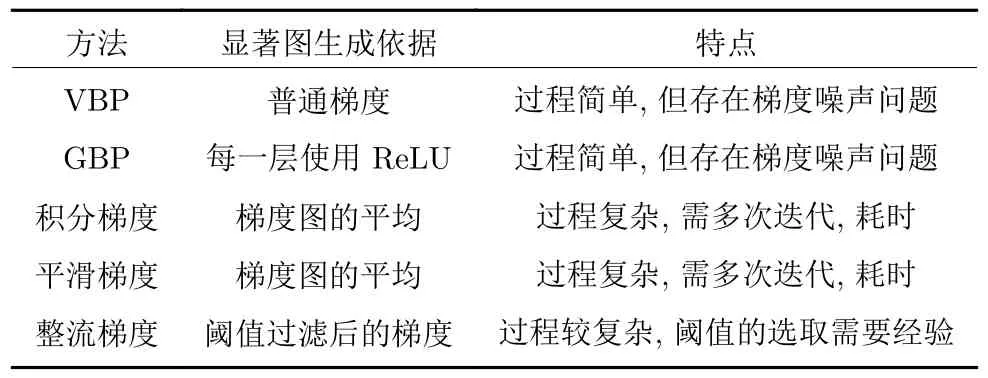
表1 梯度方法及其变种的特点比较Table 1 Comparison of the characteristics of the gradient method and its variants
2.1.2.2 反卷积
Zeiler 等[13]提出基于反卷积的可视化方法,反向重建CNN 中间层神经元学习到的模式.通过正向卷积的逆过程,将中间层激活值逐层反向卷积到输入空间,在输入空间找到激活该神经元的特征.
为了清楚介绍经典反卷积过程,首先将正向卷积过程形式化.如图13 所示,对于正向卷积[1,15],输入图像x经过含有L个卷积层的网络f,进行特征提取与分类,该过程形式化表示如下:

图13 反卷积可视化方法的过程Fig.13 The process of deconvolution visualization method

式中,Al(1≤l≤L)表示中间第l个卷积层输出的多通道特征图,θ表示CNN 的参数集合,函数f表示正向卷积过程.
1)卷积层:将卷积过程形式化为第l层的卷积核fl作用于一个多通道特征图Al,*表示卷积运算,如下:

2)激活层:使用激活函数ReLU 过滤负激活值,该过程如下:

3)池化层:使用最大值池化过程中,仅取每个池化窗口中的最大值,并纪录各最大值在整张特征图中的位置,称为switches.它可以在反向池化过程中,按照纪录的位置恢复最大值.过程如下:

对于反卷积过程,形式化如下:
1)反池化层:按照正向最大值池化中纪录的最大值位置,将反向过程中的特征图各元素恢复到其原始位置.该过程增加了特征图尺寸,恢复到正向池化前的特征图尺寸.对于在正向池化中被丢弃的值所在的位置,在反向池化中对其填充0.过程如下:

2)反激活层:使用激活函数ReLU 处理反池化得到的特征图:

3)反卷积层:使用正向卷积核的转置作为该层的反向卷积核:

上述过程表明,反卷积和正向卷积相似,可对特征图连续处理,从中间层恢复到输入层,实现上采样效果.该过程中,仅逐层恢复较强的激活值,一直到输入空间,这样可以发现输入空间中哪些特征引起了中间层某些较强的激活.
VBP、GBP 和反卷积3 种典型的反向传播方法过程大致相同,但在反向传播中对ReLU 函数的处理策略却不同.图14 是3 种方法的反向传播过程对比,使用了ReLU 或ReLUBP函数.其中,Conv表示正向过程卷积,ConvBP表示对应的反向过程.ReLUBP表示激活值为正,ReLUBP表示激活值为正的区域反向传播其梯度,激活值为负或零的区域其反向梯度为零.ReLU 则根据梯度值自身的正负来过滤梯度.GBP 综合了ReLU和ReLUBP,只有在激活值和梯度值均为正的情形下,该位置的梯度才会反向传播,其余位置仍保持为零.

图14 VBP、GBP 和反卷积三者之间的关系[49]Fig.14 The relationship of VBP,GBP and deconvolution[49]
2.1.2.3 LRP 及其变种
Bach 等[58]提出层级相关性反馈(Layer-wise relevance propagation,LRP),重新定义了新的反向传播规则,使用相关性函数R来计算某个输入变量对函数值的贡献,如图15 所示.其中,函数值f(x)可按照制定的逐层相关性传播规则,从输出层一直分解到输入空间的每个变量上,以度量每个变量与函数值之间的相关性.R(x)表示输入变量x的每一维对该输出的贡献大小.

图15 LRP 的过程Fig.15 The process of the LRP
如图16 所示,假设输入层向量记作x=,其中 1≤d≤V,V表示输入层向量维度.中间第l层向量记作z=,V(l)表示第l层向量维度,对应的激活值记作a=,如下[19]:

图16 LRP 正向传播的过程[19]Fig.16 The forward propagation process of the LRP[19]
将输入层记作第0 层,中间层从第1 层开始,最后一层为第L层.
在反向传播中,各层神经元的相关性分值定义如下:将输入层变量的相关性分值记作R(x)=,简写为.中间第l层神经元的相关性分值记作R(z)=,简写为R(z)=.
LRP 方法中涉及几个约束条件如下[19]:
约束1.输入空间中变量贡献值的正负由其相关性分值的正负决定.相关性函数值R(xi)的含义如下:

约束2.输入空间贡献值由函数值f(x)分配.f(x)为网络输出层目标神经元的函数值,其值等于输入空间所有变量的相关性值之和:

约束3.层级相关性分值守恒.函数值f(x)对中间各层神经元的相关性值分配满足守恒定律:

约束4.第l层某个神经元被分解出的相关性值,等于其流向的第l-1 层中所有神经元的相关性值之和:

约束5.第l层某个神经元被流入的相关性值,等于第l+1 层所有流向该神经元的相关性值之和:

上述定义和约束规定了相关性值的含义及守恒原则,对应的示例如图17 所示,其中实线对应约束4 的内容,虚线对应约束5 的内容.

图17 LRP 反向传播的过程[19]Fig.17 The backpropagation process of the LRP[19]
在上述约束规则的基础上,定义逐层反向传播的αβ规则,如下:
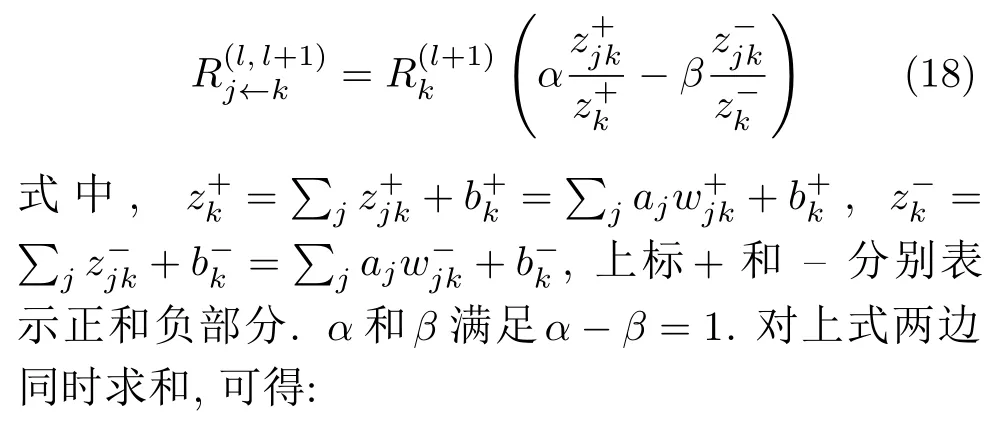
以上是化简后的α和β规则.在实际应用中,取α=1,β=0,由式(18)和式(19)分别得到:

式(22)~(23)表示α=1、β=0、b=0 情形下的相关性传递规则.相关性值传递与正向过程中的权重和激活值有关,它们决定了每个神经元的相关性分配比例.
尽管LRP 的传播规则非常细致,但初始情形下的相关性值仅考虑了目标类别的神经元,忽视了其他类别神经元的作用,即:

式中,N表示第L层神经元的总个数.进一步地,Iwana 等[60]提出了Softmax 梯度层级相关性反馈(Softmax-gradient LRP,SGLRP),将Softmax 梯度信息引入初始相关性分数值,以区分其中的各个类的比例:

2.1.2.4 深度泰勒分解
深度泰勒分解(Deep Taylor decomposition,DTD).Montavon 等[61]认为梯度方法属于DTD 方法的一种特殊情形,即用输入空间所有像素的梯度之和表示输入层的相关性分数总和.DTD 的思想基于CNN 的函数特性,采用数学中的泰勒分解方法对CNN 进行分解.假设将CNN 视作一个由输入到输出的函数f,其中x为输入变量,f(x)为输出结果,则可以对该函数在某点a处进行泰勒分解,如下:
从数学的角度观察,右侧第1 项f(a)表示a点处的函数值,右侧第2 项 (f′(a)/1!)(x-a)表示该函数的一阶导数(斜率)和自变量与点a差值的乘积,右侧第3 项与函数的二阶导数(曲率)相关,后续依次为更高阶导数项.而从神经网络的角度观察,f(x)表示网络输出值,也即对输入变量x的分类结果,将其分解到输入变量上,即表示输入变量的贡献值.假如a点为零点,满足f(a)=0,则f(x)的一阶泰勒项f′(a)·x即与VBP 方法相似,使用梯度与输入变量的乘积作为相关性值.
从热力图的计算方式看,梯度方法对应的显著图由f′(a)得到,表示预测结果对输入图像中哪些特征的改变较为灵敏.DTD 对应的显著图则由f′(a)·x得到,显著图中将会包含输入图像中的原始特征,相当于梯度值与输入图像共同作用的结果.因此,与梯度方法相比,DTD 回答了“是哪些特征让这张图像被分类为猫?”,而梯度方法则回答了“是哪些特征让这张图像更像一只猫?”.这看起来是大致相同的问题,但实际上前者寻找的是猫的所有特征,而后者则更偏向于寻找能使猫区分于其他事物的特征,这也可作为梯度方法为何称作灵敏度分析方法的一种理解[19].
2.1.2.5 小结
本节介绍4 种基于反向传播的可视化方法,核心思想是通过设计一定的反向传播规则,将CNN网络输出结果反向传播到输入空间,为输入空间的各个变量分配相关性值,以衡量其对预测值的贡献,这样在输入空间形成了由相关性值构成的图像,即热力图.热力图以不同明暗强度的形式表明各像素点与预测值之间的相关性.最简单的反向传播规则依靠网络自身梯度反向传播中的链式法则,如VBP方法.更复杂的则采用自定义的反向传播规则,如LRP 和DTD.
2.1.3 类激活映射
1)类激活映射(Class activation mapping,CAM)通过生成类激活图来可视化CNN 的关注区域,类激活图使用区域级的特征高亮方式,以突出与特定类别最相关的区域.Zhou 等[62]认为,随着CNN 层数的加深,中间层特征图编码中与决策无关的信息越来越少,因此越往深层目标信息越抽象,语义信息也越丰富.CNN 最后的卷积层在高层语义信息上达到最佳,其对应的特征图含有最抽象的目标级语义信息,且每个通道检测到目标的不同激活部位.因此,通过对最后的特征图进行通道级加权调整,可生成与特定类别最相关的类激活图.
CAM 所依赖的网络结构如图18 所示,假设最高层特征图(第L层)为AL,其中,第k个通道为,经过全局平均池化(Global average pooling,GAP)层映射到Softmax 输出层进行分类.生成类激活图的形式化表示如下:

图18 CAM 的过程Fig.18 The process of the CAM

2)梯度加权的类激活映射(Gradient-weighted CAM,Grad-CAM).由于CAM 使用的GAP 层并没有出现在AlexNet[1]、VGGNet[15]和GooLeNet[14]等常见的网络中,因此,若要使用CAM 可视化CNN,需要按照图18 对网络结构进行改造并重新训练模型,这极大地增加了工作量.为了更一般化CAM,Selvaraju 等[63-64]提出了基于梯度的CAM—Grad-CAM.其基本过程与CAM 相似,但为了克服对于GAP 层的依赖,Grad-CAM 使用反向传播中获取的通道梯度均值作为通道权重,生成的热力图有类似的效果,具体过程如图19 所示.

图19 Grad-CAM 的过程Fig.19 The process of the Grad-CAM


式中,求和元素为通道k内部每个神经元激活值的梯度,Z表示归一化因子.将得到的类激活图和GBP 得到的显著图逐点相乘,能够实现这两种热力图特点的融合,生成细粒度的、含有类别区分性的热力图.
1)Grad-CAM++.Chattopadhyay 等[65]进一步提出了Grad-CAM 的更高阶导数版本Grad-CAM++,其基本形式与Grad-CAM 相同,仅使用的通道权重不同.Grad-CAM++将更高阶的梯度(高阶导数)的组合作为通道权重,改善了多目标图像的可视化效果,具体细节这里不再赘述.
2)分数加权的类激活映射(Score-weighted CAM,Score-CAM).Wang 等[66]认为Grad-CAM和Grad-CAM++都是基于梯度的类激活图生成方法,采用的线性加权权重是由梯度或其变体构成.而梯度具有不稳定特性[51-52],将导致生成的类激活图也不稳定.因此,Score-CAM 试图使用非梯度方法获取各通道的权重,以消除梯度不稳定性的影响.如图20 所示,Score-CAM 将最高层特征图的每个通道作为一个掩码,将其与输入图像叠加后再送入CNN 中,由CNN 对该通道的各类别的重要性(即分类概率)进行预测.使用特定目标类别的重要性进行通道加权,可以生成噪声含量更少的类激活图,并且抵抗一些基于梯度的对抗性攻击,实现稳定的解释效果.

图20 Score-CAM 的过程[66]Fig.20 The process of the Score-CAM[66]
此外,还有U-CAM[67]和Smooth Grad-CAM++[68]等以CAM 作为基础的改进研究.根据上述几种方法的分析,可知类激活图的生成过程基本相同,将最高层特征图作为基本的特征空间,使用权重对各通道进行加权.理论上,权重大小应当表示该通道对特定类别的贡献大小.经过加权调和后,将各个通道相加合并,得到二维的初始类激活图.此时,类激活图的尺寸与最高层特征图的尺寸相同,需采用插值方式(如双线性插值)将其扩大到与输入图像相同的尺寸.在类激活映射基本形式下,各种方法采用不同的权重对各通道进行加权,这些权重及其优缺点分析如表2 所示.

表2 类激活映射方法的比较Table 2 Comparision of the class activation mapping methods
2.1.4 激活最大化
激活最大化(Activation maximization,AM)方法用于可视化网络的偏好输入,找到能够最大限度激活某个特定神经元的输入模式.与梯度方法的不同之处在于,梯度方法研究输入数据点通过怎样的变化可使输出分数更高,这种变化量即作为该点相对于输出的贡献度大小.AM 方法则研究一组怎样的输入数据点集合能够使某个输出类别分数最高,通过优化方法来搜索这样一组数据点,即为网络最偏好的某个类别数据点集合.如图21 所示,对于图像分类模型,使用一张随机初始化的图像,通过最大化分类该图像的某个激活值,来反向传播并更新输入图像的像素值,经过多次迭代,得到能最大激活该神经元的偏好图像.该过程中,分类器的参数保持不变,仅更新输入图像.

图21 AM 的过程Fig.21 The process of the AM
首先,使用带标注训练集样本 {xt,yt},按照设计的目标函数,对CNN 进行参数优化并保存,将该网络称作目标CNN,即图中实线部分.然后,对随机初始化的输入图像x,在固定目标CNN 模型参数的情况下,通过优化x来实现对输出层某个类的概率最大化,即图中虚线部分.此时,以最大化网络输出概率分布中某个类别的概率为目标,设计目标函数如下[19]:

该目标函数通过添加对x的L2 正则化约束,保证其数值变化的稳定性.使用梯度上升优化算法来更新参数,此时目标函数的优化对象并不是网络参数,而是输入矩阵x.在经过多轮迭代优化后,最终可得到最大化的类别概率和对应的输入x,即为该类别神经元所偏好的最佳输入模式.同时,目标函数也可以选择最大化中间层某个神经元或一组神经元的激活值,从而得到中间层神经元偏好的输入模式.
然而,试图从随机初始化的输入变量中优化出真正与目标类别c对应的视觉概念是非常困难的,实验中经常观察到,虽然指定类别的概率p(wc|x,θ)达到迭代停止时的最大值,但此时对应的输入图像x在视觉上却没有任何语义概念.这表明,对于恢复出一张有意义的图像来说,仅依靠类别概率作为先验,可用的信息量远远不够.文献[69]指出了该问题,并提出添加一些限制措施(如正则化约束)进行改进,以形成视觉上接近真实图像的生成图像[70-71].文献[19]从为该优化过程的起点引入先验知识入手,使用生成网络改进AM 方法,提出了基于深度生成模型的AM 方法(Deep generator network based AM,DGN-AM),如图22 所示.
图22 所示的过程分为3 个步骤:

图22 DGN-AM 的过程Fig.22 The process of the DGN-AM
1)训练目标CNN.目标CNN 表示需要被解释的CNN,同时也用来提供先验知识,作为编码器对输入图像进行编码.此时,训练数据来自标准的带标注数据集,使用交叉熵作为损失函数,优化参数为目标CNN 的参数.
2)训练GAN.分别训练生成器G 和判别器D,此时,固定目标CNN 的参数,仅输入无标签的训练数据,先后对D 和G 进行参数优化.
其中,D 的损失函数含有两部分:最大化Dr和最小化Df.Dr表示D 对真实图像的分类得分,Df表示D 对生成图像的分类得分,如下:

G 的损失函数含有最大化Df、最小化xf和输入图像x之间的欧氏距离,最小化vf(fake)和v之间的距离:

式中,v表示x经过目标CNN 提取的特征向量,该向量可作为x的代表.xf表示G 作用于向量v而生成的图像.vf表示使用目标CNN 从生成图像提取的特征向量.λ1和λ2表示损失函数的系数.该式同时对输入向量及特征向量两部分进行约束,实现G 生成图像质量的提升.
由于不需要使用训练数据的标签,因此上述GAN 的训练是无监督训练过程.对GAN 训练的目的是学习训练样本的先验分布,从而在后续使用G生成图像时,能够直接使用数据集的先验知识,而非在完全随机初始化的输入上生成图像.
3)使用AM 生成最佳输入模式,如图22 虚线框内所示.针对随机初始化的向量vr,经过G 生成相应的输入图像,再使用CNN 分类模型(即步骤1中目标CNN,这里用作分类器)进行分类,并对输出概率分布中某类的概率进行最大化.因此,损失函数与正常的CNN 分类损失函数相同,优化对象为输入向量vr,其余网络参数均保持不变.最终得到优化向量,再将该向量经过G,即可生成相应的图像.由于步骤2 中训练后的G 含有丰富的来自于原始训练数据的样本信息,相当于从目标CNN 中提取而来,此时生成图像的视觉效果比单纯使用AM 时的结果更佳.
如图23 所示,表示在MNIST 数据集上使用AM 方法对目标CNN 模型的可视化结果[19].其中,第1 行表示最简单的情形,损失函数为loss=maxxln(p(wc|x,θ)).第2 行表示对x进行L2 正则化约束,损失函数为loss=maxx(ln(p(wc|x,θ))-λ||x||2).第3 行表示使用数据集的均值xmean对x进行约束,损失函数为loss=maxx(ln(p(wc|x,θ))-λ||x-xmean||2).第4 行表示使用DGN-AM 方法得到的结果.可以看出,随着先验知识的加入,AM方法针对模型的各个类别提取出的图像越来越逼近真实图像,逐渐变得清晰可理解.其中,DGN-AM方法得到的结果最接近真实图像.
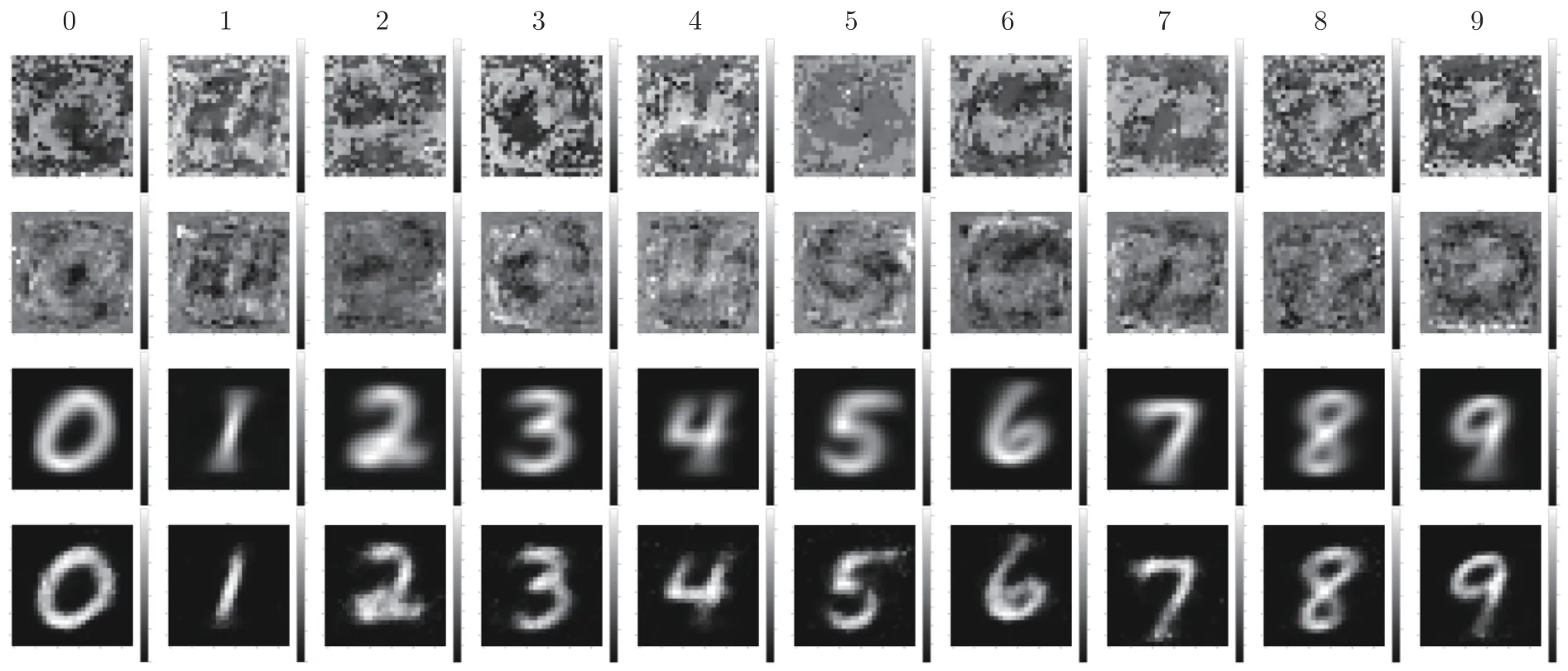
图23 在MNIST 数据集上使用AM 方法对目标CNN 模型的可视化结果对比[19]Fig.23 Comparison of the visualization results of the target CNN model using the AM method on the MNIST dataset[19]
2.1.5 注意力掩码
注意力掩码是由图像识别中的注意力机制产生的掩码矩阵.由于注意力机制本身能够解释网络对不同变量的依赖,因此,对注意力掩码的可视化能够观察到网络对变量的关注度,从而理解网络的训练效果及决策所依据的输入特征.图像识别模型中的注意力机制包含通道注意力、空间注意力与通道注意力的混合、类别注意力等.
1)SENet:2018 年,Hu 等[18]提出SENet 模块,对CNN 中间层特征图的各通道进行加权调整,提升特征学习效果.如图24 所示,对于一个尺寸为C×H×W的多通道特征图,C表示通道数,H和W分别表示各通道的高和宽,SENet 模块采用压缩和激励2 个操作,对特征图进行变换,得到一个C维向量.使用该向量对各通道进行通道级加权,实现对通道间依赖关系的显式建模和重标定.其中,压缩操作使用全局池化将特征通道池化为单个点,则整个特征图变为一个特征向量,该向量称之为全局信息向量,其每一维均包含对应的整个特征通道信息.然后,经过两个全连接层的先降维再还原变换,实现自适应校准(即激励操作),向量尺寸变化为C→(C/r)→C,其中r表示首个全连接层对C维向量的降维率.最后,将得到的向量作为通道的权重向量,其每一维表示对应特征通道的权重,经过通道加权调整后的特征图更具有针对性,含有更明确的语义信息.以该方法实现的SENet 网络,在2017 年ILSVRC 图像分类挑战赛上获得冠军,实现了2.25%的前5 分类错误率.
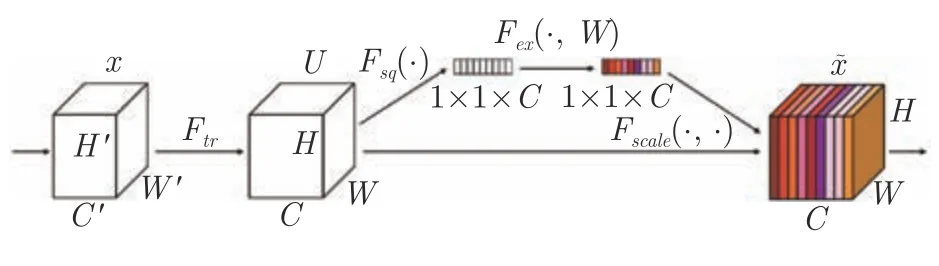
图24 Squeeze and excitation 模块[18]Fig.24 Squeeze and excitation module[18]
2)CBAM (Convolutional block attention module).2018 年,Woo 等[72]在通道注意力模块的基础上作了进一步探索,认为通道级注意力将各通道视为一个整体,仅能实现各通道间的相互关系建模,而忽略了通道内不同空间位置的特征分布特性.为此,提出了一种通道注意力与空间注意力结合的方式,对特征图分别进行通道级和空间级的权重调整,得到通道注意力权重与空间注意力权重,再与原始特征图融合,实现对特征图各通道和通道内不同位置的特征重标定.如图25 所示.将通道与空间注意力模块插入到初始网络结构中,采用先通道后空间注意力模块的顺序,对特征图进行加权调整,且不改变特征图尺寸.与SENet 相比,CBAM 在各通道之间和通道内各空间位置上实现了更加深入的特征图自适应调整.

图25 通道—空间注意力模块[72]Fig.25 Channel-spatial attention module[72]
通道注意力模块如图26 所示,其整体结构与SENet 大致相似,但在某些策略上有细微调整,例如同时使用了使用了最大值池化和平均值池化2 种池化方式.

图26 通道注意力模块[72]Fig.26 Channel attention module[72]
通道注意力权重由各通道全局池化得到,因此通道注意力权重向量的维度与通道数相同.与之不同,空间注意力权重按照各空间位置进行逐通道池化,因此空间注意力权重为矩阵形式,其尺寸与各通道尺寸大小相同,空间注意力模块如图27 所示.

图27 空间注意力模块[72]Fig.27 Spatial attention module[72]
3)类别注意力.对于一些具有类别区分信息的可视化方法,如CAM 和Grad-CAM 等,常被集成到网络结构中,通过生成针对特定目标的注意力掩码,引导网络将更多注意力应用到这些区域的特征提取和语义表示上,以针对性地提升模型的学习性能.文献[73]提出使用一个额外的预训练模型辅助生成CAM 类激活图,将该图二值化后作为掩码添加在原图上,从而集中对原图中目标主体区域的关注.文献[74]同样将该思路应用到图像分类任务中.文献[75]使用自顶向下的注意力将类别信息传递到特征空间,实现针对特定类的注意力.文献[76]利用指定类的注意力实现物体级别的区域关注,从而对多标签图像进行分类等.文献[77]使用Grad-CAM 为遥感图像的多标签分类任务提供类别注意力等.这些研究在不同任务中应用类别注意力,而非聚焦于可视化方法本身,可作为表征可视化方法的拓展研究.
基于注意力掩码的可视化呈现出以下特点:1)注意力可视化多用于诊断网络的训练效果,通过观察内部表征来推测注意力效果的好坏,但无法对CNN的决策依据进行解释.2)网络分类/检测准确率越高,中间层注意力掩码对目标的信息覆盖越全面,则特征图对目标的定位越准确.图28 展示了在ResNet50 中使用SENet 和CBAM 两种模块的注意力效果对比.

图28 ResNet50、集成SENet 的ResNet50 (ResNet50 +SE)和集成CBAM 的ResNet50 (ResNet50 +CBAM)的最高层特征图的可视化[72]Fig.28 Visualization of the highest-level feature maps of ResNet50,ResNet50 integrated with SEnet(ResNet50+SE),and ResNet50 integrated with CBAM (ResNet50+CBAM)[72]
2.1.6 其他方法
除了上述几类方法外,还有一些方法在图像和文本任务的解释上均适用,常被用于特征归因及特征选择,CNN 可视化仅是其中一项应用.本节介绍2 种常见的方法:局部可理解的模型无关解释(Local interpretable model-agnostic explanations,LIME)和沙普利加和解释(Shapley additive explanations,SHAP).
1)Ribeiro 等[78]于2016 年提出LIME 方法,用于解释任意黑盒分类器的预测.LIME 方法的主要思想为,在输入样本附近多次采样,获取一组近邻样本,使用这些近邻样本训练可解释的线性模型,利用线性模型在局部范围内逼近深度模型的预测,实现模型代理解释.LIME 可应用于图像和文本等分类器的解释.
具体地,给定输入样本x,目标分类器f,定义解释模型g,LIME 通过不断在输入样本的邻域内采样并作为输入,来优化下列目标函数:

式中,πx表示采样样本与输入样本之间的相似性度量,Ω(g)约束解释模型的复杂度,G表示一组可解释的简单模型.该式的前一项用于保证解释模型的保真度,使其在局部的预测结果与目标分类器尽量一致.第2 项用于约束解释模型的复杂度.相似性度量函数用于衡量扰动前后样本的相似度,这个相似度即可用作采样样本的权重:

式中,D(·)表示距离函数,如L2 范数距离.将LIME实例化为对某个图像分类器的解释,其中的训练样本构建流程见图29.
图29 中,x′(d′维,可理解的特征)表示输入样本x(d维,原始特征)的可理解表示形式,例如二值向量,每一维表示x的某个特征出现与否.将这种映射记作x=hx(x′).在x′附近随机采样N次,得到N个样本.将恢复到原始输入空间,得到zi,计算相应标签f(zi)及与x的相似度πx.其中,采样的过程就是在可理解的表示域内扰动,扰动的对象为一组相邻的超像素(即一系列相邻且相似的像素形成的像素块),通过改变x′∈{0, 1} 的值,来表示对应超像素的出现与否,从而获取采样样本.
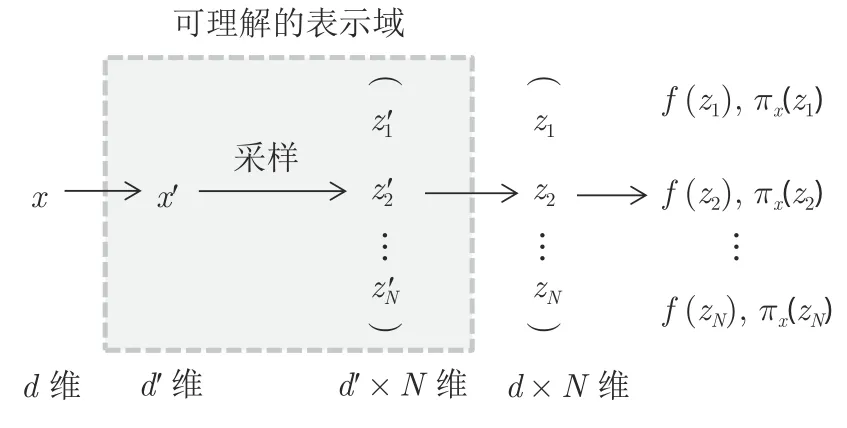
图29 LIME 的样本处理流程Fig.29 The sample processing flow of the LIME
按照上述流程,获得采样样本及其标签,形成输入样本x的近邻数据集Z=,可在Z上优化如下目标函数,得到解释模型g:

直观来看,LIME 希望在局部范围内,使用采样得到的简单样本z′训练出解释模型g(z′),使得在z′≈x′的局部范围内,总有g(z′)≈f(hx(z′)).这样训练得到的解释模型g便可以在局部代替待解释的目标模型f.
如图30 所示,表示LIME 在3 种不同的CNN模型上针对输入图像的可视化结果,此时设置随机采样样本数量为10 000,使用余弦函数作为距离度量.该方法能够对特定预测结果分别找到正向和负向贡献的特征,且不同模型上的可视化效果也不同.LIME 方法的优点在于简单且易于理解,是一种模型无关的方法,通用性较好,对于图像和文本分类任务均适用.但其缺点在于其采用的是局部近似,无法对模型整体进行解释,并且需要重新训练一个新的解释模型.同时,对于同一个输入样本,多次运行LIME 方法时,由于每次随机采样的样本不同,使得每次解释结果都不相同,且所选择的采样样本数量和特征数目等参数都会影响解释效果,使其无法为用户提供一个稳定的解释.
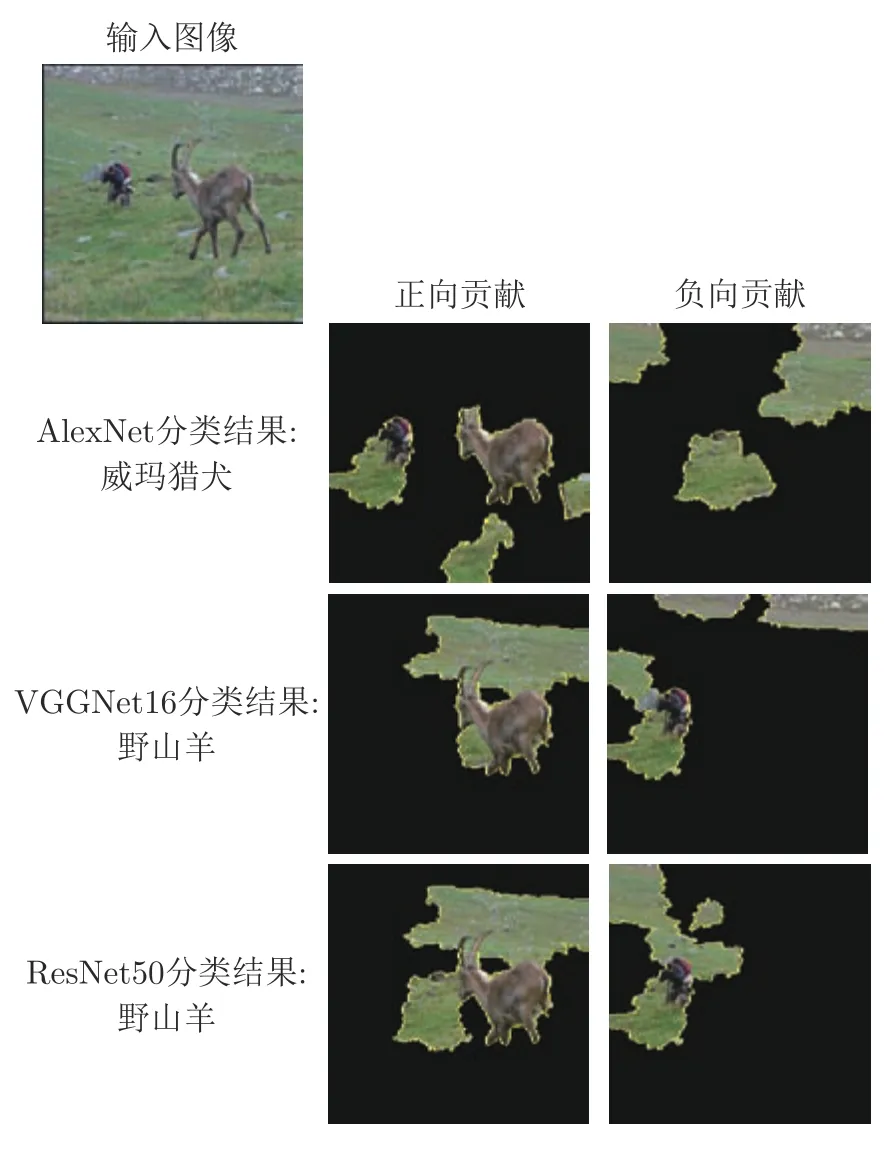
图30 LIME 在AlexNet、VGGNet16 及ResNet50 模型上可视化结果示例Fig.30 Example of LIME visualization results on AlexNet,VGGNet16 and ResNet50 models
2)Lundberg 等[79]利用博弈理论的Shapley 值来解释模型预测,提出了SHAP 方法.Shapley 值由加州大学洛杉矶分校的Shapley 等[80]提出,用于解决合作博弈中的分配均衡问题,在许多领域均有应用.SHAP 方法的基本思想为,将输入数据中的特征视为合作博弈模型中的玩家,通过计算每个玩家的Shapley 值来量化该玩家在完成任务中的贡献,进而为其分配相应的贡献值,即该特征对预测结果的贡献.
假设有目标模型f和解释模型g,且f和g满足:

1)局部保真性.即对于同一个输入样本z,解释模型g的输出g(z′)应当与目标模型f的输出f(z)保持一致.
2)缺失性.若输入中某个特征没有贡献,则其Shapley 值为0,即=0→φi=0.
3)一致性.如果目标模型发生变化,使得某个特征的贡献增加,则其对应的Shapley 值也应增加.
Shapley 值是已被证明满足有效性、对称性、可加性和单调性的指标.按照上述性质,每个特征都具有唯一的Shapley 值.Lundberg 等[79]给出了具体的Shapley 值计算公式.文献[79]还介绍了几种基本的SHAP 方法变体,如Kernel SHAP、Linear SHAP、Low-Order SHAP 和 Deep SHAP.其中,Kernel SHAP 就是线性模型下的LIME 方法与Shapley 值的结合.SHAP 方法的优势在于其广泛适用性,CNN 决策结果的可视化仅是其应用的一个方面,对于其他机器学习模型的解释也都适用.
2.2 分析与比较
2.2.1 特点分析
第2.1 节介绍了多种典型的可视化方法,本节对它们的特点进行了归纳,如表3 所示,分为以下6 个方面:

表3 可视化方法的特点比较Table 3 Comparison of characteristics of visualization methods
1)细粒度与区域级.细粒度的可视化实现像素级的相关性反向传播,输入空间中每个像素都会被分配一个对应的贡献值,在数值上表示其对CNN某个特定输出值的贡献大小.基于反向传播的方法多属于细粒度的可视化方法.区域级的可视化一般不关注单个像素与输出之间的相关性,而是将某些区域所涵盖的具有语义概念的像素集合作为整体,其中单个像素的数值大小与其对网络输出值的影响并不一定呈现比例关系,但区域整体上对CNN 的输出类别贡献成比例.基于扰动的方法、类激活映射及注意力掩码等多属于区域级的可视化方法.
2)类别相关性.通用的可视化方法生成的热力图是与具体输出类别无关的,比如梯度方法、反卷积、LRP 和DTD 等.输入图像中含有明显语义信息的目标都会被可视化方法定位,但无法区分哪些目标和当前输出类别最相关.类别区分性可视化方法生成的热力图是类别相关的,可在输入空间中找到与指定输出类别相关的区域和特征.CLRP、SCLRP、AM 和CAM 这类方法均为类别区分性可视化方法.
3)在线与离线可视化.离线可视化表示对已经完成训练的模型的可视化,在可视化过程中仅通过测试样例输入,而无需对模型本身的结构或参数进行任何修改.在线可视化则需要修改模型结构并重新训练模型,典型的在线可视化方法如CAM,需要为网络末端添加GAP 层,然后重新训练模型.
4)模型明晰的和模型不可知的.模型明晰的方法将模型视作白盒,事先知道模型结构并能获取模型的参数和激活值等内部信息.模型不可知的方法将模型视作黑盒,仅能获取模型的输入和输出,对模型的其他信息(如网络结构和参数等)并不了解.除简单扰动、LIME 和SHAP 方法外,其他均为模型明晰的方法.
5)可视化视角.包括从解释神经元的激活、层的表征、输出类别等方面来理解CNN 的表征.以反向传播可视化为例,通常以输出类别的分数开始,反馈到输入空间得到热力图,即表示从输出类的角度进行可视化.注意力掩码通常以在线的方式,直接观察中间层的特征图,从而理解CNN 模型训练效果的好坏.
6)局部解释和全局解释.局部解释一般仅以单个输入样本为指导,根据对该样本的可视化结果来理解CNN 在该输入下的表征与决策.全局解释侧重从整个模型的角度,理解模型所学习到的知识和决策规则等.显然,解释CNN 对单个样本的决策结果比理解CNN 模型整体更加简单,因此,局部解释比全局解释在方法实现上更加容易,表3 所列方法多数属于局部解释方法.
2.2.2 结果比较
由于不同方法生成的热力图效果并不相同,后处理对于最终结果的比较非常重要,图31 总结了一些基本的热力图处理技巧.

图31 热力图的后处理与效果对比Fig.31 Post-processing and effect comparison of heatmap
方式1 表示3 通道热力图(如VBP、GBP、反卷积等基于反向传播的方法)在各通道像素值的相加求和后,可转换为单通道热力图,视觉效果上等同于将彩色图转换为灰度图.
方式2 表示单通道热力图(如CAM)在通道复制后,可转换为3 通道热力图.由于各通道数值相同,因此,其视觉效果与单通道热力图相同.
方式3 表示单通道热力图(如CAM)转换为3通道热力图.与方式2 不同的是,该方式使用OpenCV等工具包中的伪彩色函数生成伪彩色图.这种后处理在CAM 类方法中比较常见,用于区分图像中的物体类别.
利用上述热力图后处理方法,选择几种典型可视化方法进行效果对比,图32(a)为VBP[23],图32(b)为GBP[50],图32(c)为Smooth gradient[52],图32(d)为Integrated gradient[53],图32(e)为Guided Grad-CAM[63],图32(f)为LRP[58],图32(g)为Grad-CAM[63],图32(h)为Score-CAM[66],图32(i)为简单扰动[13],图32(j)为有意义的扰动[44].图32 对比展示了这些方法的测试效果[83].

图32 可视化方法的效果比较.每张输入图像分别展示了灰度和彩色两种可视化结果Fig.32 Comparison of the effects of visualization methods.Each input image shows two visualization results of grayscale and color image
从可视化结果来看,基于梯度的方法生成散点形式的热力图,这与梯度方法的逐元素反向传播有关.上述几种梯度方法生成的散点图中的噪声越来越少,效果上呈现出逐渐改善的趋势.对于不同的输入图像,由于图像中前景物体及背景的复杂程度不同,使用某一种方法得到的可视化效果并不总是特别理想.但总体上看,GBP 和Smooth gradient方法更能将关注度集中在前景物体上.LRP 方法则倾向于可视化目标的轮廓特征,可作为一种物体边缘检测器使用.
CAM 类方法生成的类激活图能够实现区域级可视化效果,这一点与梯度类方法区别较为明显.CAM 类方法的优势在于类别区分性,这种特性使其能够应用于含有多个不同类目标的场景,实现目标定位任务.设定适当的阈值二值化处理类激活图,然后生成目标的边框,即可实现图像级标签下的弱监督目标定位.
基于扰动的方法对应的热力图较为平滑,这与所使用的扰动策略有关.扰动方法需要多次前向传播,相比于其他方法更耗时.由于扰动方法直接在输入空间进行修改,有时可能无意中扰动出对抗性输入,使相应的可视化结果出现误差[44].另外,若所能获取的有关目标模型的知识有限,可优先选择扰动方法进行可视化,因为扰动方法多数是模型不可知的方法,这是其重要优势.
3 可视化效果的评估
可视化效果评估用于度量不同方法的解释效果,指导用户针对特定任务选择合适的可视化方法.具体来讲,可从以下两个方面对可视化效果进行评估:有效性和鲁棒性.
3.1 有效性
3.1.1 定性评估
定性评估方法在表征可视化研究的早期被经常使用,依靠人的视觉感观来评价解释结果是否符合人的认知.由于定性评估具有简单直观、便于理解等优点,至今仍广泛使用.常用的定性度量标准有以下3 个:
1)视觉连贯性.热力图需要关注感兴趣的目标区域,忽略其他不相关区域.在视觉连贯性标准下,热力图中突出的区域对感兴趣目标的覆盖越全面、冗余部分越少,表明可视化效果越好.
2)视觉可分辨性.热力图需要与预测结果中的不同类别相对应,这对于含有多个不同类别目标的图像来说至关重要.例如,在同时含有“Dog”和“Cat”的图像中,“Dog”的热力图应该聚焦与之对应的图像区域,而尽量去除与“Cat”相关的区域.视觉可分辨性对应于可视化方法的类别区分性特点,用于评估热力图能否针对特定类别进行可视化,以定位仅与该类别其相关的区域和特征.
3)多目标可视化.当多个同一类别的目标同时出现在图像中时,可视化方法需要同时定位多个目标,而没有遗漏其中的某个目标.
此外,解释结果的客观性也应作为一种评价可视化方法有效性的标准,即解释结果是否真实的反映了模型的决策依据,而非按照“预期”寻找到了人类所希望的决策依据.例如,文献[78]的实验表明,分类器做出的决策可能依据目标周围的环境因素,而目标自身却不是主导因素.该情形下,解释方法只能对分类器的分类依据如实解释,而非按照人的期望去定位目标主体的某些特征.文献[84]的研究同样验证了这一点,若分类器从数据集中学习到“女性面部涂口红,男性面部不涂口红”这种带有一定“偏见”的事实,导致分类器面对“涂有口红”的男性图像时,仍将其判定为“未涂口红”.此时,尽管分类器结果错误,但解释方法应当遵循分类器的决策依据,定位于男性面部的其他特征,将其作为判定为“男性”,进而“未涂口红”的依据.而非像人所认为的那样,直接对该图像的嘴唇位置进行定位,这样的解释结果与分类结果将出现明显不一致的现象,无法客观地解释分类器的决策依据.
尽管解释的客观性问题在相关文献中较少被提及,但也应引起注意.只有让解释方法客观、真实地反映模型的决策依据,才能使人真正理解并诊断其存在的问题,进而改进与优化.
3.1.2 定量评估
定量评估方法按照某种得分规则,计算数据集上所有图像的可视化结果的平均得分,从而定量比较各方法的优劣.这里介绍3 种典型的定量评估方法.
1)弱监督目标定位[63-64].使用目标定位任务的指标来评价可视化方法的目标定位效果.具体方法为:按照设定的阈值处理热力图以生成边框,然后和真实边框进行比较,计算交并比(Intersection over union,IoU).对于某个定位结果,IoU >0.5表示成功定位该目标,以此在整个数据集上计算定位准确率.该方法多用于评价CAM 这类目标区分性较好、具有区域级可视化效果的方法.
由于某些细粒度的可视化方法更易定位与预测最相关的像素,而非寻求覆盖目标整体,因此,热力图对应的边框将会定位在目标的局部区域,导致IoU 值总体偏小.此时,IoU 值无法反映解释结果的优劣,表明这种评价方法具有一定的局限性[66].
2)指向游戏[75].对于特定类别目标的热力图,计算其最大激活值是否落入该类别的一个实例的边框中,若落入则计入指向成功1 次(#Hit),否则不计入(#Miss),以此计算每个目标类别的定位准确率Acc=#Hits/(#Hits+#Misses).最终使用不同类别的平均准确度作为度量标准.
指向游戏只考虑热力图的最大值点,无需突出特定目标的全部区域,仅需对热力图最少量的后处理,这样对不同特点的热力图更公平.其可能的缺点在于热力图自身的噪声问题,最大值点可能来自极值噪声点,导致评价结果产生误差.
3)随机性检验.文献[85]提出随机性检验方法,用于评估可视化方法的适用范围和解释质量.分为两种随机化检验:一种是模型参数随机化,使用随机化模型参数和预训练模型参数加载模型,对比这两种情形下可视化方法的输出变化,以检验该方法是否对模型参数敏感;另一种是数据随机化,对训练数据标签进行随机化打乱并重新训练模型,与未打乱标签的可视化结果进行对比,检验该方法是否对训练数据标签敏感.
随机性检验已成为广泛认可的基准测试方法,用于检验可视化方法是否能有效实现解释,从而区分出对模型参数和训练数据标签并不敏感的可视化方法.这种不敏感的可视化方法的真实作用相当于一个独立于模型的边缘检测器,而非一个有效的解释器.文献[85]通过该实验验证了VBP 和Grad-CAM 的有效性,而GBP 和Guided Grad-CAM 等未通过检验.
3.2 鲁棒性
可视化方法的鲁棒性与CNN 模型的鲁棒性不同.CNN 模型的鲁棒性是指模型的预测结果不会因为对抗攻击而发生明显变化.可视化方法的鲁棒性是指在面临对抗攻击时,可视化方法仍能够提供准确有效的解释.为此,本文将对抗攻击分为以下2 种情形:1)攻击模型预测结果,测试解释结果是否随之改变;2)攻击解释结果,测试其是否会被误导.
3.2.1 稳定性
可视化方法的稳定性是指在模型预测受到对抗攻击时,可视化方法的解释结果仍能保持稳定而不发生显著变化.其中,用于攻击模型预测结果的对抗样本xadv具有以下3 个特点:
1)对原图x施加扰动δ后得到对抗图像xadv,xadv相对于x的变化在视觉上难以感知,满足||δ||=||xadv-x||≪ε(ε表示较小常数),保证扰动后图像的视觉不变性;
2)图像分类模型f对xadv的分类结果将会极大的改变,即f(xadv)f(x);
3)解释方法g产生的解释结果不会因为扰动而发生显著变化,满足g(xadv)≈g(x).
这里简单介绍一种经典的基于梯度的对抗攻击方法 (Fast gradient sign method,FGSM)[86],可用于攻击模型的预测结果,检验可视化方法的解释结果是否仍保持稳定.FGSM 利用梯度上升方法,通过优化输入图像来最大化损失函数,使模型产生误分类的结果,此时对应的输入图像即为对抗图像.FGSM 方法形式化如下:

式中,∇xJ(θ,x,f(x))表示原图对应初始类别的梯度.sign(·)表示符号函数,根据梯度正负取+1 或-1.ϵ表示扰动系数.FGSM 的具体过程如图33 所示.其中,x表示输入图像,f(x)的结果为“Panda”,置信度为57.7%.扰动量大小ϵ=0.07.经过“Nematode”的扰动后,扰动后的图像虽然在视觉上仍为“Panda”,但却被分类为“Gibbon”,且置信度高达99.3%.
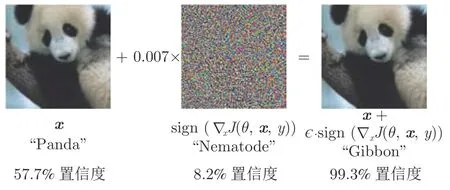
图33 FGSM 生成对抗样本的过程[87]Fig.33 The process of generating adversarial example by FGSM[87]
文献[63]和文献[66]使用FGSM 对抗样本测试Grad-CAM 生成的类激活图的稳定性,如图34所示.图34(a)和(b)分别表示原图和对抗图像,原图分类结果为Boxer:0.40,Tiger Cat:0.18.对抗图像的分类结果为Airliner:0.9999.在图34(c)和图34(d)中,针对对抗图像,使用Grad-CAM 分别对Boxer (Dog)和Tiger Cat (Cat)进行定位时,仍可以稳定地找出相关目标区域,尽管此时这两种目标的分类置信度非常低.这表明Grad-CAM 产生的解释具有一定的稳定性,可以抵抗针对模型预测结果的对抗攻击.

图34 使用FGSM 对抗样本测试Grad-CAM 的稳定性[63]((a)原图;(b)对抗图像;(c)Grad-CAM“Dog”;(d)Grad-CAM“Cat”)Fig.34 Using FGSM adversarial example to test the stability of Grad-CAM[63] ((a)Original image;(b)Adversarial image;(c)Grad-CAM“Dog”;(d)Grad-CAM“Cat”)
尽管这是一种测试可视化方法稳定性的方法,但文献[88]认为,当模型分类结果受到攻击时,解释结果应当随着分类结果的改变而改变,即解释方法应该尝试对新的分类结果进行解释,而不应保持原来的解释不变,这样才是一种忠实的解释方法.由此可见,这种稳定性测试方法的合理性仍存在一定疑问.根据这种思路,即可视化结果应当与新的误分类结果相对应,文献[88]使用可视化方法来检测对抗样本,从而找出其中误导分类结果的特征.
3.2.2 抗欺骗性
可视化方法的抗欺骗性是指可视化方法自身受到对抗攻击时,解释结果能够抵抗这种欺骗性的攻击,仍能实现有效的解释.
文献[89]指出,可视化方法生成的显著图可以被人为设计的对抗样本操纵.通过对输入施加视觉上难以察觉的扰动,使网络的输出近似保持不变,显著图却可以被任意改变.也就是说,这种对抗样本的攻击对象不是模型预测结果,而是对预测结果的解释.用于攻击可视化方法的解释结果的对抗样本xadv具有以下3 个特点[90]:
1)对原图x施加扰动δ后得到对抗图像xadv.xadv相对于x的变化在视觉上难以感知,满足||δ||=||xadv-x||≪ε(ε表示较小常数),保证扰动后图像的视觉不变性;
2)图像分类模型f对xadv的分类结果基本不变,即f(xadv)=f(x);
3)解释方法g产生的解释结果g(xadv)将根据扰动的变化而变化g(x),使之偏离原来的解释结果,即满足g(xadv)g(x).
一种典型的针对解释结果的攻击方法如图35所示,图35 中3 个CNN 表示同一个待解释的预训练CNN.其中,Con 表示原图x的分类置信度,Exp 表示对应的解释.使用均方误差损失作为约束,使对抗图像的分类结果f(xadv)逼近原图的分类结果f(x),而解释结果g(xadv)则逼近目标图的解释结果g(xtarget),最终的目标函数是两者的加权和:

图35 针对可视化结果的攻击Fig.35 Attacks on the visualization results

式中,xtarget表示用于诱导解释结果的目标图像,λ1和λ2为2 部分的权重参数.
攻击结果如图36 所示,图36(a)为目标图像xtarget,图36(b)为原图x,图36(c)为对抗图像xadv,图36(e)~(g)分别表示对应的显著图.由图36 可以看出,g(xadv)被诱导偏向g(xtarget),显示出一只鸟的轮廓.与此同时,f(xadv)却基本保持不变.
对于使用随机初始化的原图生成的对抗图像图36(d),同样可以使用上述攻击方法,使其对应的显著图36(h)被诱导偏向目标图的解释图36(e),尽管原图和对抗图像本身没有任务的语义信息.最终,分类器对对抗图像图36(d)的分类结果图36(b)相近,解释结果与图36(e)相近,但对抗图像图36(d)从视觉上看仅是一幅噪声图像.可见,显著图解释方法的抗欺骗能力的确存在漏洞,而目前对于造成这一问题的原因分析仍在探索之中[90].
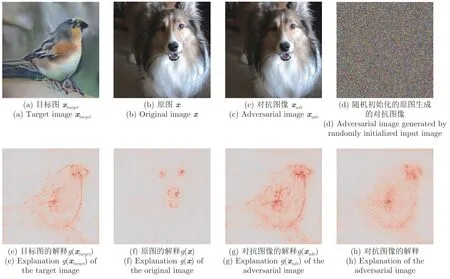
图36 使用GAN 生成的目标图像诱导对LRP 显著图的攻击[82,90]Fig.36 Using the target image generated by GAN to induce an attack on the LRP saliency map[82,90]
上述分析显示,在输入图像未被显著改变、分类结果也保持不变的情形下,针对分类结果的解释却可以被明显改变而偏向任意目标的解释,表明可视化方法存在被欺骗的可能.文献[91]从另一种思路出发,通过重新微调模型参数,使微调后的模型的预测结果大致不变,但解释结果却可以被任意引导.文献[92]对自解释模型所提供的解释的鲁棒性进行了评估,发现通过创建这样一些对抗性输入,会使自解释模型提供错误的解释,表明现有的自解释模型提供的解释鲁棒性并不好,无法经受住对抗性攻击.另一方面,为了提升可视化方法的鲁棒性,使其不易被误导,文献[93]将显著图应用到模型训练中,对训练集进行数据增强,从而训练出归因鲁棒性较好的模型.
4 可视化的应用
4.1 理解与解释模型
表征可视化是理解CNN 模型的一种重要途径,在图像领域应用广泛,常见于图像分类、场景识别等任务的可视化解释.本文第3 节所述的表征可视化方法常用于对基于CNN 的图像分类器的解释,例如,AM 方法用于可视化网络对输入图像的偏好,从另一种角度揭示了网络对何种输入模式的依赖性较强.注意力掩码能够告诉设计者网络的关注点,这使其自身具有一定的可解释特性,因此,基于注意力掩码的可视化方法不仅可以验证注意力机制自身的有效性,也常用于观察网络的训练效果.
此外,表征可视化方法也可以应用在其他类型的数据,例如,CAM 这类方法具有较好的类别区分性,能够用来确定与特定输出类别相关联的图像区域,可在视觉问答模型中帮助定位与问题最相关的图像区域.LRP 方法在制定反向传播规则时依靠网络的权重与激活值,而非特征图和通道等图像领域的概念.因此,它不仅适应于图像识别任务的解释,还可以用于可视化机器翻译、语音识别[94]等任务中,为这些领域的研究者提供了另一种理解模型的途径.
4.2 诊断与优化网络
在CNN 学习效果诊断和结构优化上,基于反卷积的可视化能够观察任意层的神经元的激活,从而分析CNN 的学习率、卷积核尺寸及步长等重要参数的设计是否达到最优.文献[13]使用基于反卷积的可视化方法对AlexNet 内部激活进行分析与改进,进而提出了ZFNet,获得了2013 年ImageNet 数据集图像分类任务冠军.这种基于表征可视化的针对性分析和诊断方式,很大程度上避免了盲目的参数调优.文献[95]利用基于梯度的可视化方法指导单像素的对抗性扰动和对抗性分析,帮助模型进行对抗性学习.文献[88]则使用显著性方法检测对抗样本,避免模型受到对抗攻击.文献[72]使用Grad-CAM 产生的类激活图来观察网络中间层表征,分析对比不同结构设计对模型训练效果的影响.此外,CAM 这类方法还可用于提供自注意力,优化CNN 的结构设计.例如,文献[73]和文献[77]使用Grad-CAM 生成自注意力的掩码作为图像蒙版,用于去除图像中的非重要区域,并将处理后的图像应用于下阶段的模型训练和推理.文献[96]将CAM 方法集成到图像转换模型的自注意力模块中,引导模型关注源域与目标域之间的判别性区域,从而提升图像转换模型对细节的关注能力.
4.3 其他方面
除了对CNN 本身的理解与诊断,可视化方法在其他任务上也有不断拓展与延伸,例如CAM 和Grad-CAM 方法在弱监督目标定位任务上取得了非常好的效果.文献[93]进一步探索了将显著性归因方法产生的显著图作为先验,应用于弱监督的分割任务上.在应用领域方面,可视化方法能够提升对推荐系统决策结果的理解[97],以及与知识图谱的结合来实现可解释的推荐算法[98].对于自动驾驶[99-100]以及智能医疗[101]等领域,由于这些领域对于决策风险的承受能力较低,可视化方法对这些领域应用的现实落地至关重要.
5 存在的难点及发展趋势
5.1 难点分析与趋势展望
近年来,CNN 表征可视化相关研究越来越多,研究者们提出了各种可视化方法,极大推动了该领域的进展,但仍存在一些难点问题有待解决,本节对其进行了归纳,并分析了未来可能的研究趋势.
1)对于可视化方法,仍存在噪声、稳定性、解释能力有限等问题.
通过对多种可视化方法的实验比较发现,多数可视化方法生成的热力图含有一定的噪声,噪声产生的原因仍没有权威统一的解释.同时,面对不同图像时的可视化效果不尽相同,有些图像可能直接导致可视化方法的失效,而失效的原因尚不清楚,仍有待进一步的探究.此外,面对复杂背景条件的图像、多目标场景、小目标图像等,受限于模型本身在面对这些情形时的性能约束,可视化方法的解释效果并不一定好.未来可能的研究趋势是将可视化方法与其他解释方法的结合,从不同侧面不同角度解释模型,从而缓解单一可视化方法解释效果受限的问题.
2)对于可视化效果的评估,仍欠缺标准统一的评估方法.
目前很难找到适用于大多数可视化方法的评估标准,原因在于许多方法的目标并不相同,也即每种方法对“可解释性”的理解并不相同,导致各种可视化方法的解释结果差别较大.同时,很多可视化方法自身同样缺乏清晰明确的数学与逻辑机理,导致结果难以量化比较.如果可以从“可解释性”的概念出发,统一数个可解释性的标准,那么对于可视化结果的评估也就有了依据.同时,还可以根据可视化方法产生的热力图的特点进行分类评价,每类热力图使用与之适应的评价标准,提升其侧重解释某方面的能力.
3)对于可视化的对象,细粒度的识别模型难以可视化解释.
可视化方法多应用于对图像分类、目标定位及场景识别等任务的解释,能够实现对多目标图像中语义级目标的区分.例如,“Cat”和“Dog”虽然同属动物,但是在语义级上属于明显不同的两种动物.而单独对于“Cat”这一动物,实现的不同品种猫的细粒度图像分类,受限于分类网络自身准确性,可视化方法很难找到用于区分目标的细节特征,此时的解释效果非常有限,甚至对于不同的目标可视化效果始终相同.与人们的视觉观察及解释能力相差较远.这一问题或许可以通过视觉解释与语言解释相结合的途径来改善解释效果.对可视化解释难以描述的细微之处,辅助加以自然语言描述形式的解释(比如对猫的颜色、猫耳形状的描述),能够实现更好的解释效果.
4)对于可视化解释的完备性,现有研究中的解释结果与预测结果无法相互印证.
理论上看,一个完备可靠的解释可以使用户从中推理并得到被解释的预测结果,而目前的可视化方法仍不具备这一能力,仅能从预测结果中得到解释结果,而无法根据解释来推断出模型的预测,即两者之间的相互印证关系没有被建立起来.例如,如果可视化方法给出了错误的解释,但这一解释恰好符合用户根据预测结果推测的预期解释,进而使得用户相信了解释的可靠性,这将对其形成误导.此时,若能根据解释结果推断预测结果,发现推断出的预测结果和实际预测结果不相符合,则可通过进一步分析发现其中存在的问题,从而提升用户对可视化方法的信任.
5.2 学界近年来的关注
近年来,众多人工智能领域顶级会议关注人工智能和深度学习可解释问题,其中许多涉及到表征可视化方面的前沿研究,如[102]:
1)IJCAI 2020 Tutorial on Trustworthiness of Interpretable Machine Learning;
2)CVPR 2020 Tutorial on Interpretable Machine Learning for Computer Vision;
3)ICCV 2019 Workshop on Interpretating and Explaining Visual Artificial Intelligence Models;
4)ICLR 2019 Workshop on Safe Machine Learning;
5)CVPR 2019 Workshop on Explainable AI;
6)AAAI 2019 Workshop on Network Interpretability for Deep Learning;
7)IJCAI 2018/2017 Workshop on Explainable Artificial Intelligence;
8)ICML 2018 Workshop on Human Interpretability in Machine Learning;
9)NIPS 2017 Interpretable Machine Learning Symposium.
表4 列举了可解释性深度学习研究领域的部分综述文献,对各文献的内容侧重作了简要介绍,其中包含CNN 表征可视化的相关内容.
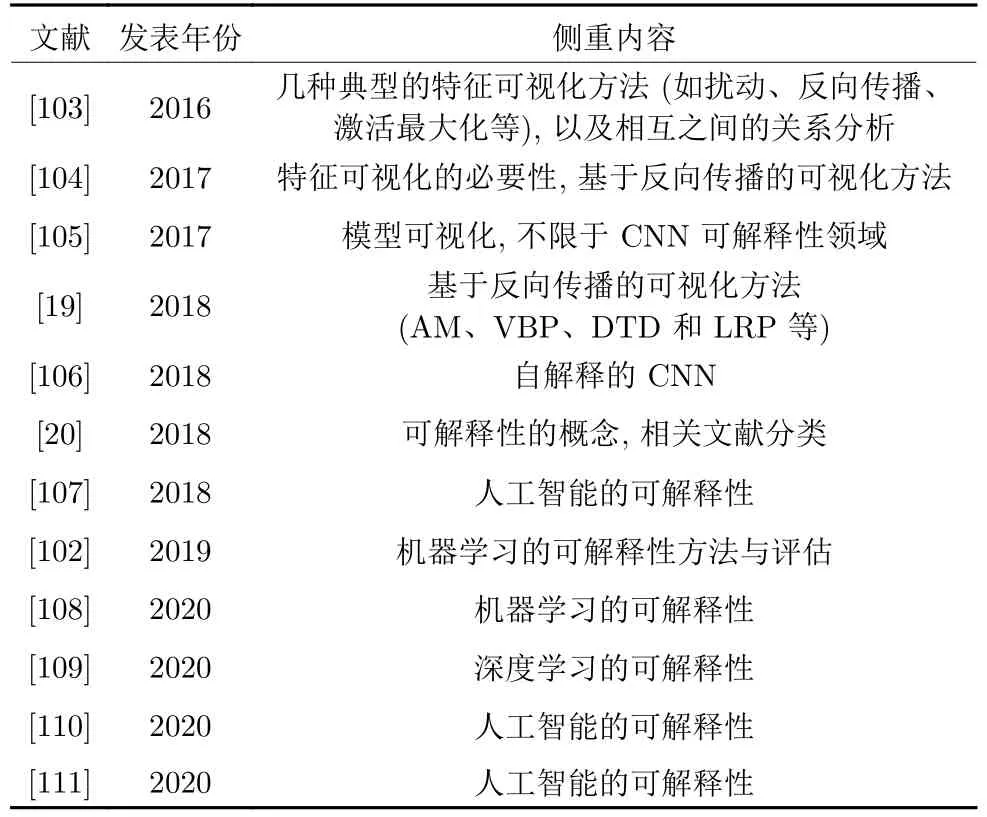
表4 CNN 表征可视化相关的综述文献统计Table 4 Review literature statistics related to CNN representation visualization
5.3 开源工具
CNN 可视化的相关开源工具,一些研究人员在GitHub 等网站开源了多种方法综合的代码包,这对于表征可视化研究及迁移到其他任务使用具有重要价值.
文献[103]对2016 年以前的可视化方法作了详细调研和分类整理,将其中主流方法分为修改输入的方法(如基于扰动的方法)、反卷积类方法和重建输入的方法(如激活最大化方法)三类.根据这些方法开发了基于MatConvNet 框架[112]的CNN 可视化工具包FeatureVis,适用于Matlab 平台上的CNN 可视化.
Ozbulak[83]发布了一个内容丰富的开源代码包,实现了10 余种可视化方法,包括梯度方法(如VBP、GAP、Smooth gradient、Integrated gradient 等)和类激活映射方法(如Grad-CAM、Score-CAM 等).该源码包基于PyTorch 框架,已经被许多研究人员关注和使用,受到领域内好评,目前仍在更新与拓展中.
韩国科学技术院的Kim[113]发布了基于Tensorflow 框架的可视化源码包,该源码包含有梯度类方法、CAM 类方法、激活最大化方法等,配有详细的使用教程,对各种方法的原理及实现过程的介绍细致,适合初学者使用.
此外,佐治亚理工学院的Wang 等[114]实现了对CNN 网络的交互式可视化,可对CNN 网络各层的卷积、激活和池化操作的数据流向及中间层特征图进行实时展示,支持交互式的选择输入图像,实时观察各层的数据流向及表征情况.虽然该工具更多关注于CNN 网络中数据流的走向,而非解释CNN 中间层特征的语义,但也非常有利于理解CNN的内部表征.
6 结束语
本文围绕CNN 表征可视化研究,详细梳理了该领域近年来相关的文献,从基础概念及内容、常见方法的分类与比较、效果的评估及应用等方面进行了详细介绍.其中,对常见的可视化方法的分类和介绍是本文的重点内容,该部分详细分析了各种算法的过程,归纳了每一类方法的特点,并对它们的效果进行了比较.最后,对该领域仍存在的难点和未来的研究趋势作了总结和展望.
随着表征可视化研究的深入,人们对CNN 的特征学习和预测机制的理解也会更加深刻.同时,其他类型的可解释性方法也在不断发展中,在它们的共同作用下,不断推动可解释性深度学习的发展.期待未来实现可理解的、透明的和高效的深度学习方法.
