基于IBA预测算法在线径控制系统中的应用*
2022-08-30周克良邓飞翔董世镇
周克良,邓飞翔,董世镇
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
线径推挤生产线的主要工艺用于挤出生产包裹铜芯线的外层绝缘材料,由于生产现场的各种因素,如牵引电机的速度变化、注塑机中塑料的变化等都会使电线缆的线径产生偏差。传统的线径生产控制系统通常采用比例—积分—微分(proportion integration differentiation,PID)闭环反馈控制,虽然这种方法简单方便,但由于传统线径生产系统中挤塑机部分存在复杂的时变性、非线性和滞后性,传统的PID控制器调节存在线径偏差较大,抗干扰能力弱,鲁棒性能较差等缺点,不能满足实际生产的需求。
随着智能控制技术的发展,关于改进线径控制系统的偏差,国内外专家提出了将智能算法引入线径控制系统中提出采用粒子群[1]算法进行PID参数优化,大林算法[2]进行抑制扰动,动态矩阵[3]、Smith预估器[4]来解决线径控制系统的滞后性。
上述的一些算法,虽然对线径的控制起到一定效果,但线径的滞后性问题和抗干扰能力不强,并且需要建立准确的数学模型,易出现模型失配等问题。为了解决以上问题采用改进蝙蝠算法(improved bat algorithm,IBA)[5,6]和MAC预测算法,利用IBA预测算法进行PID参数优化,能够提高线径系统的控制精度,抗干扰能力和鲁棒性。
1 电缆线径控制系统分析
在电缆线径推挤过程中主要研究对象为PTFE卧式电缆推挤系统[7],其主要生产工艺过程为将芯线放入放线单元,在牵引机的驱动下通过塑料推挤机头,塑料机头里放入PTFE胚料,当线芯通过推挤机头时使得PTFE包裹在线芯外形成一层电缆绝缘保护套,最后经过冷水定型风干收卷成盘的过程。
PTFE卧式电缆推挤系统如图1所示。影响电缆线径的主要参数有电机的推挤速度和芯线牵引速度。在推挤过程中,牵引速度给定,当推挤速度较大时,挤出的PTFE胚料较多,包裹在铜芯线上使得电缆线径较大,反之推挤速度较小时,挤出电缆线径较小。线径较大或较小均不符合生产要求。
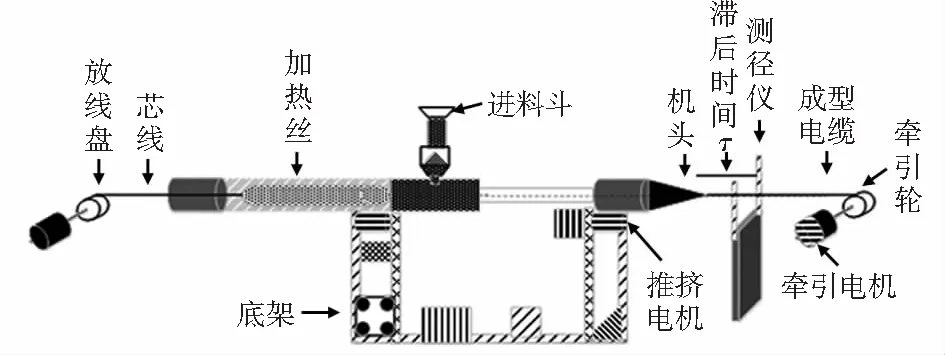
图1 电缆线径推挤系统结构
对电缆推挤生产工艺流程分析和控制特性分析之后,通过改变推挤速度来控制线径的方式,能从根源上减小线径波动。挤塑机部分可等效为一阶惯性加纯滞后环节,调速系统一般采用闭环系统控制,在控制系统数学模型中,可通过一个二阶惯性环节加滞后环来表示该系统,建立电缆线径控制系统数学模型和线径控制系统结构图如图2所示。公式如下

图2 线径控制系统结构
(1)
综合考虑采用并联PID调节器[8],输出的信号如式(2)所示
(2)
式中e(t)为实际线径值与目标线径设定值的差值,Kp,Ki,Kd分别为PID控制器需要调节的三个参数。
2 算法原理
2.1 蝙蝠算法原理
蝙蝠算法(bat algorithm,BA)[9]是利用蝙蝠个体利用发出特有的脉冲频率、响度,回声定位功能的随机搜索群智能算法,蝙蝠在一个n维的搜索空间中用xi=(xi1,xi2,…,xin),vi=(vi1,vi2,…,vin)分别表示蝙蝠i搜索猎物时的位置向量和速度向量,根据蝙蝠个体速度、位置更新公式不停地找到更好的位置,蝙蝠i在寻优中更新方式如式(3)~式(5)所示
fi=fmin+(fmax-fmin)β
(3)
vid(t+1)=vid(t)+fi(xid(t)-pbd(t))
(4)
xid(t+1)=xid(t)+vid(t+1)
(5)
式中vid(t)为第i只蝙蝠在第t次迭代过程中第d维速度;xid(t)为第i只蝙蝠在第i次迭代过程中第d维位置,pbd(t)为在t代迭代过程中全局适应值最优蝙蝠b的第d维位置,β为 [0,1]区间内的随机数,fi为蝙蝠i搜索猎物时发出的频率,fmin,fmax分别为蝙蝠迭代寻优过程发出的最小频率和最大频率。目前所有蝙蝠个体搜索到的最优解集中任意挑选出一个解xold,则蝙蝠个体在xold这个解附近会产生一个新解xnew,如式(6)所示
xnew=xold+εA(t)
(6)
式中ε为 [-1,1]内的随机系数;A(t)为蝙蝠个体在第t次迭代寻优过程中的平均响度。
当蝙蝠发现猎物后,脉冲响度、速率逐渐减小和加大,因而能更好地锁定猎物的目标位置,这一迭代寻优过程,更新公式如下
At(t+1)=αAi(t)
(7)
式中Ai(t),Ai(t+1)分别为第i只蝙蝠在第t,t+1次迭代寻优程中的脉冲响度。
2.2 IBA
由于蝙蝠在飞行过程中只顾朝最优方向调整个体的位置,往往记不住之前的位置,因此易陷入局部最优。故在原始的蝙蝠算法的基础上,给蝙蝠算法引入一个记忆功能,即引入惯性权重因子w,算法前期给w赋予一个较大的值使算法全局搜索能力加大,后期接近目标时,给w赋予一个较小的值,放慢飞行速度,以加强局部搜索能力,改进后的速度更新表示为
vi(t+1)=wvi(t)+f1r1(xi(t)-gbd(t))+(xi(t)-
pbd(t))f2r2
(8)
(9)

(10)
式中r0为r1的初始值,tmax为种群最大迭代次数,t为目前迭代的次数,n为非线性调制指数,随着迭代次数的增加,到最后r1将逐渐接近于1,r2将从1减小到0,算法由全局搜索逐渐向局部搜索转化。
2.3 模型算法控制预测模型原理
为了解决电缆线径控制系统中存在的时滞性对系统造成的影响,模型算法控制(model algorithm control,MAC)[10,11]为预测控制算法的一种。采用基于脉冲响应的模型,预测系统未来的输出状态,通过模型输出与参考轨迹预测未来值比较误差经反馈校正后,应用二次性能指标进行滚动优化,计算当前时刻应加于系统的控制作用。预测模型、滚动优化、反馈校正为MAC控制的核心内容。
2.3.1 预测模型
采用多步输出预测,一般对象的脉冲响应预测模型为
(11)
式中p为多步输出预测时域长度,m为控制时域长度,g为脉冲响应序列,k为采样时间。多步预测输出公式如下
Ym(k+1)=GU(k)+F0U(k-1)+h(y(k)-ym(k))
(12)
式中Ym(k+1)为预测模型输出矢量。
2.3.2 滚动优化
在MAC控制中,k时刻的优化准则要选择未来p个控制量,使在未来p个时刻的预测输出尽可能接近由参考轨迹所确定的响应曲线,这一优化性能指标可以表示为

(13)
式中qi,rj为输出误差和控制量的加权系数。
2.3.3 反馈校正
k时刻系统的闭环预测输出可表示为
yp(k)=ym(k)+h*e(k)
(14)
其中,h=[h1,h2,…,hp]T,h为反馈系数矩阵,e(k)为误差,如式(15)
(15)
2.4 IBA预测PID控制器设计
建立IBA预测PID算法控制线径,该算法由IBA算法控制部分和预测部分组成,其中控制部分采用IBA-PID算法,目的是快速优化PID控制参数,使得实际线径值快速逼近设定目标线径值。预测部分采用MAC预测算法,目的是预测下一时刻线径值,提前预测给出最优的控制量,得到更好的动态响应能力。
实际输出y(k)要按一个参考轨迹向设定值ysp过渡。在k时刻其参考轨迹由未来采样时刻值yr(k+i),预测控制中选择未来p个控制量,使未来p个时刻输出线径值yp尽可能接近参考轨迹确定的期望输出yr,由预测模型经过滚动优化和在线校正预测出与实际输出线径值y(k)进行比较,得到的频率误差值e(k)直接作为预测模型的输入,进行在线校正,得到预测值yp,将yp与yr进行做差后进行优化到控制量作为IBA-PID控制器的输入量。IBA-PID控制器的输出量u(k)作用在线径控制系统,对于系统未来的行为实现了超前控制,改善电缆线径系统控制性能。建立IBA-PID预测算法线径推挤系统模型如图3所示。

图3 IBA预测算法结构框图
3 仿真实验结果分析
3.1 仿真数据
实验仿真采用MATLAB进行仿真,根据江西某电缆线径推挤生产设备公司的实验数据为基础进行仿真进行系统辨识得到的系统参数,得到数据为T1=0.9,T2=1.5,τ=1,K=0.6,则系统传递函数可表示为
(16)
设置IBA算法共同参数设如下:种群规模为40,最大迭代次数为200次,初始响度A(0)=0.4,频率f变化范围在[0,5],蝙蝠脉冲发射率r在[0.4,0.6]。Kp的取值范围为[0,2.5],Ki,Kd取值范围均为[1,4]。
3.2 动态性能指标分析
对于电缆线径推挤系统来说,综合考虑选用ITAE作为目标函数更加合适,如式(17)所示
(17)
从图4和表1可以看出:IBA算法相比于BA算法迭代次数要多20 次,说明IBA算法已经跳出局部最优寻找到全局最优值,而BA算法可能陷入局部最优值。

图4 IBA和BA迭代次数与适应度函数

表1 IBA和BA算法寻优结果比较
3.3 脉冲响应和抗干扰分析
从图5和表2中可知,当系统未受到任何扰动时,采用传统PID控制算法的超调量σ%约26.41%,调节时间ts约13.52 s,BA算法超调量σ%约10.25%,调节时间ts约10.38 s,而IBA预测算法超调量σ%约1.92%,调节时间ts约2.81 s,通过比较得出IBA预测算法具有超调量小,调节时间短。

图5 未加扰动前调节曲线

表2 未加扰动前性能评价
从图6和表3中通过在25 s时加入单位为1的脉冲扰动信号,并且滞后时间常数和增益都不变的情况下,通过3种算法比较可得出IBA预测算法的抗干扰能要强于BA算法和传统PID算法,并且调节时间较短。
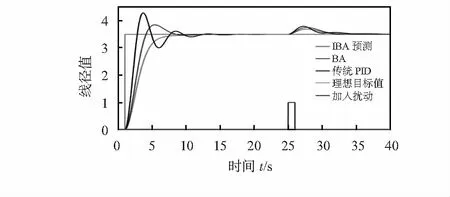
图6 参数不变时加入扰动
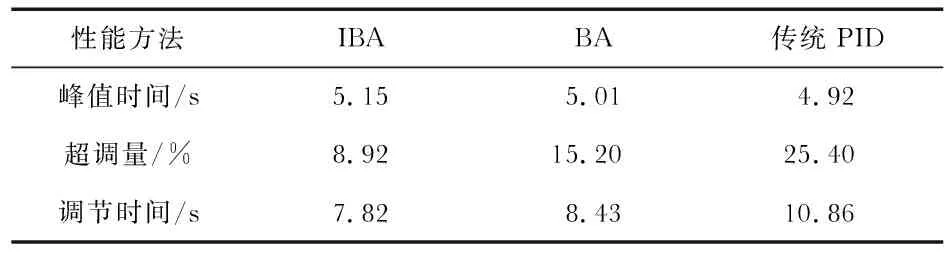
表3 参数不变加入扰动后性能评价
从图7和表4中从参数变化的情况下加入扰动,滞后时间常数增加20 %和增益增加20 %的前提下,从超调量和调节时间和抗干扰能力的性能分析上看出,IBA预测算法对系统受滞后时间的影响最小,能够保持各项性能达到最佳,且优于BA和传统PID算法。

图7 参数变化时加入扰动
表4 参数变化加入扰动后性能评价
4 结 论
通过对电缆线径推挤生产工艺和推挤过程的分析,提出IBA预测算法来优化PID控制器,通过上面的仿真加入扰动测试和3种算法做对比得出,IBA预测算法优化PID参数与BA算法和传统的PID优化算法比较具有明显的优势,IBA预测算法对线径控制系统来说具有超调量小,抗干扰能力强,鲁棒性较好等优点。