切换LPV系统的模型参考自适应追踪控制
2022-08-28范晏铭谢静
范晏铭,谢静
(沈阳工业大学,辽宁 沈阳 110870)
0 引 言
近随着科学与技术的发展,工业控制领域出现了新的问题。一方面,随着控制精度需求的提高,单精度线性模型已不能满足人们的需求。另一方面,关于非线性系统的研究成果还很少。目前的研究方法大多只针对具有特殊结构的非线性系统。为应对上述问题,一类线性变参数(linear parameter-varying, LPV)系统被提出。LPV 系统是一类带有时变调度参数的线性系统。LPV 系统实时可测调度参数的动态特性决定了其可以对某些动态过程或变化的环境因素进行建模,从而大大提高了建模精度。LPV 系统的动态特性使其能够更准确地描述非线性系统。同时,由于LPV 系统是线性的,因此可以利用成熟的线性控制理论对其进行控制设计。由于LPV 系统的优良特性,故而受到了广泛的关注,经过三十余年的发展,已经有很多重要成果。为了稳定参数相关的闭环系统,文献[5]中使用了LPV 控制器,通过将存在条件转化为半无限维凸优化来解决控制综合问题,并给出了范数下的干扰/误差衰减结果。文献[6]设计了能够稳定非线性系统的LPV 控制器。文献[7]研究了具有时变时滞和有界扰动的离散时间马尔可夫跳变LPV 系统的可达集估计问题,其主要考虑的是在零初始条件下,如何获得包含系统状态的尽可能小的界集。在此基础上,在Lyapunov 泛函方法的框架下,应用一个新的求和不等式与不等式凸组合方法相结合,给出了时滞相关的条件,以保证在有界扰动出现时存在一个限制系统状态的椭球。由于LPV 系统受到了大量的关注与研究,该系统的不足之处也显现出来。如果LPV控制器的参数范围较大,则控制器可能无效。为了解决这类问题,需要设计一种切换LPV 控制器。其原理是将一个大的调度参数空间划分为多个小的子区间,并在每个子区间中设计相应的LPV 控制器。然后合理地设计切换律。切换LPV 控制器不仅解决了控制器失效的问题,而且提高了设计的自由度。
众所周知,系统的稳定性决定了其能否被使用。对于切换LPV 系统来说,稳定性问题也十分重要。然而,由于时变参数的存在,切换LPV系统的稳定性问题变得更加复杂。目前针对切换LPV 系统已获得一定成果,在文献[10]中,通过引入基于多参数相关Lyapunov 函数的LPV 控制方法,利用模型依赖平均驻留时间(Average Dwell Time, ADT)方法解决了一类具有异步切换的离散时间切换LPV 系统的稳定性问题。之后,文献[11]将该控制方法应用于航空发动机模型的控制中。此外,文献[12]构造了一个参数依赖的可靠切换控制器来抑制外部干扰,有效解决了带有执行器失效的LPV 系统的无凸传递可靠控制问题。
由于模型精度、环境变化等因素的限制,系统中的不确定性是不可避免的。为了抵消这种不确定性,模型参考自适应控制(Model reference adaptive control, MRAC)是一个好的选择。然而,目前已知关于LPV 系统的MRAC 所发表的成果不多。文献[13]设计了基于多目标LPV 模型和高阶奇异值分解的控制器模型简化方法,降低了飞机损伤模型识别的计算复杂度。针对过程不确定的模型参考自适应控制问题,文献[14]提出了一种新的解决方案。该方案将每个极端系统的控制信号的加权总和作为控制输入,并且令其可以自适应调节。为改善追踪误差,文献[15]提出了一类抗干扰LPV鲁棒模型参考自适应追踪控制系统,其中给出了LPV 参考模型的参数化形式。
在本文中,我们通过构建一个参数依赖的时变Lyapunov函数来研究切换LPV系统的模型参考自适应追踪控制问题。首先,我们研究了切换LPV 参考模型的稳定性。之后,通过一个时变正定矩阵,我们设计了切换LPV 控制器与自适应律,对于切换系统,首次使用时变正定矩阵设计自适应律。基于带有自适应律和驻留时间方法的切换LPV 控制器,系统的状态追踪误差可以收敛到位于原点的小球内。最后,通过一个涡扇发动机的例子来验证所提方法的有效性。特别的,在这种方法中,因为Lyapunov 函数是依赖于一族时变正定矩阵的,所以其并不需要满足平均驻留时间的两个基本条件,进一步提高了设计的自由度。
1 前期准备与问题陈述
一个切换LPV 参考模型如下:

其中切换信号:[0,+∞)→I={1,2,…,}是一个取决于时间或状态或包括两者的分段连续函数,代表其中子系统的数量。连续可微调度参数()=[(),ρ(),…,()]在紧集∈R上取值,且其调度参数的变化率有界:,其中=1,2,…,。A()∈R,B()∈R,∈为已知的函数矩阵,并且A)是Hurwitz 矩阵,()∈R是一个有界输入信号,可以设()=()-x()。

本文的目标是设计一个带有自适应律的切换LPV 控制器使得状态()可以跟踪参考模型状态x(),并且闭环系统所有信号都是有界的。
考虑一个切换LPV 系统:

其中∈R为系统状态,∈R为控制输入。A(),B(),∈是关于的未知矩阵函数,并且假定是一致有界的。
下列假设与定义在本文中会被用到:
假设1.1:存在一个理想增益的矩阵函数 ()∈R,以及一个非奇异矩阵函数 , ()∈R,∈,∈,使得如下等式成立:

假设1.2: ()∈ Θ, ()∈ Θ,Θ,Θ为已知紧集,且各调度参数的变化率有界,表现为 ,其中d,d为已知常数。
假设1.3:存在已知矩阵函数M()∈R,使得 ()M()为正定矩阵,即 。

定义1.1:如果存在一个常数>0 使得所有∈N都有t-t ≥,那么切换序列为:={t,t,…}的切换信号称为可容许驻留时间,其中任意常数被称为驻留时间,并且可容许驻留时间切换信号的集合可以表示为()。
2 切换LPV 参考模型稳定性分析
为应用模型参考自适应控制,参考模型的状态必须保证有界。已知如果齐次系统是渐近稳定的,那么给齐次系统一个有界输入后该系统仍能保持稳定。对应于参考模型(1)的齐次系统如下:

首先,定义一个时间序列{t,t…t…},其中t-t=δ,=0,…,-1…,且t-t=τ,如图1所示。
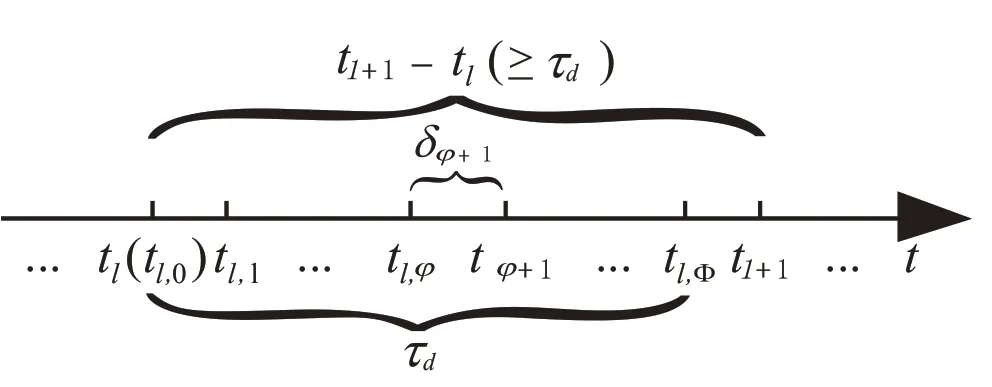
图1 时间序列示例
在本节中,时间区间{t,t}被分为+1 个部分,可以表示为:

然后,参考模型的有界性可由定理2.1 给出。

其中=,+1;=0,…,。

其中=1,…-1,+1,…且λ,λ均为已知正常数,那么齐次系统(4)是渐近稳定的。
时变矩阵P(,)可被定义为:

证明:当第个子系统激活时,李雅普诺夫函数可以表示为:

对式(8)求得可得:

首先,当∈[,t),=0,…,-1…,时根据式(9)可得:




然后考虑当∈[t,t)时,P(,)=P,(),此时




由式(8)可知,在切换瞬间t可得:

因为V(,ρ)在任何两个连续切换瞬间之间的任何区间是严格递减并在每个()≠0 的切换瞬间是非增的,现在可以认为V(,ρ)在任何>0 且()≠0 的情况下是严格递减的。对式(15)从0 至∞求积分可得


由此可得齐次系统(4)渐近稳定,则参考模型的状态是有界的。
3 主要成果
在本节将给出所提控制方法的主要成果。首先,我们设计一个切换LPV 控制器和自适应律。然后给出了闭环系统的稳定性分析。
3.1 控制器结构
针对LPV 系统,设计一个参数依赖的状态反馈控制器如下:


此外,追踪误差设为()=()-x(),则由式(1)、(2)和(18)可得:

3.2 自适应律设计




3.3 稳定性分析
基于带有自适应律(20)~(21)的控制器(18),可以给出以下定理。

证明:为分析闭环系统的稳定性,当第个子系统激活时,其李雅普诺夫函数为:

其中:


代入参数投影自适应律(20)~(21)后可知:

根据文献[20]可知:

因此式(28)可化为:
由于







其中=1-(-t)/δ,=(-)/δ,由定理2.1 可得:

其中λ∈max(λ) ,因此式(37)可化为:


之后考虑当∈[t,t)时,P(,)=P(),此时式(37)变为:

由式(7)可得:



根据式(8)在切换瞬间t可得:


选择一任意常数∈[t,t),对不等式(44)由=到=进行积分可得:

式(45)可以化简为:



由此可知误差()是有界的。
证明完毕。
注4.1:当()=0 时,则系统(2)和(4)退化为线性系统,并且此控制方法得到的理论结果退化为文献[21]内的结果。

4 仿真实例
在这一部分中,我们通过对通用电气(GE-90)涡扇发动机的仿真控制来验证所提出方法的有效性。
由于GE-90 涡扇发动机是一个非常复杂的非线性系统,并不能直接对其动态特性进行建模,本节所用到的涡扇发动机LPV 模型采用已有文献中的增益调度方法进行了验证。然而,LPV 模型实际上是一个近似模型,当调度参数发生剧烈变化时,其准确性和灵活性不能满足实际要求。为了满足实际需求,提高模型的精度,本文设计了切换LPV 模型,模型中的所有子系统均为LPV 模型。在该仿真系统中,使用调度参数指代高度,即=。通过构建两组不同的高度,仿真系统就变为了一个拥有两个子系统的切换LPV 系统。高度标准化为10 000,风扇转速标准化为3 000。仿真模型的相关资料信息来自文献[22]中已被广泛应用的涡扇发动机模型。
仿真系统的切换LPV 模型可以表示为:

其中ΔG=G-G是风扇转速的增量,ΔG=G–G是堆芯速度增量,ΔW=W-W是燃料流量增速。此外,G代表风扇速度,G代表堆芯速度,W代表燃料流量。



切换LPV 参考模型为:

其中:

参考输入为()=sin(π)+sin(2π),设δ=5,通过解式(5)~(8)可得:


图2给出了切换信号的形式,图3表现了切换参考模型状态信号的有界性,图4描述了系统(49)状态信号的有界性。而状态追踪误差由图5给出,基于图5可得状态追踪误差收敛至原点的球心内。控制器信号由图6~图7给出。图8~图11 表示自适应参数的信号,并且由图4~图5可以看出所有闭环系统的信号都是有界的。

图2 切换信号

图3 切换参考模型的轨迹

图4 系统(49)的状态轨迹

图5 状态追踪误差

图6 控制器信号u1

图7 控制器信号u2

图8 自适应参数信号Kx1

图11 自适应参数信号Kr2

图9 自适应参数信号Kr1

图10 自适应参数信号Kx1
5 结 论
本文研究了具有参数不确定性的切换LPV 系统的MRAC 问题。首先,给出了切换LPV 参考模型的有界性。其次,提出了一种基于时变正定矩阵的带有自适应律的切换LPV 控制器。然后,基于定理3.1,解决了切换LPV 系统的MRAC 状态跟踪问题。最后,以GE-90 涡扇发动机为例,验证了该控制方案的有效性。
