基于路由转发技术的GNC系统驱动控制方法*
2022-08-27李小磊
刘 博,李小磊,高 洁,刘 攀
(上海航天电子技术研究所·上海·201109)
0 引 言
随着航天任务复杂度的提升,特别是火星等深空探测任务的开展,对产品可靠性和自主性提出了更高要求。由于火星探测中存在器地通信时延和长期日凌中断的问题,探测器需要具备很强的自主姿态控制能力才能确保整器安全。同时,涉及地火转移段、火星捕获段等关键轨道时,探测器需要精准控制,及时制动“刹车”,否则会造成探测任务失败。因此,火星探测任务对制导导航与控制(Guidance,Navigation and Control,GNC)分系统的要求也越来越高。阀门驱动单元及配电控制单元作为连接GNC系统各单机并控制推进系统的重要枢纽节点,根据指令控制分系统内各设备的供电,及时驱动相应的电磁阀喷气或自锁阀开关,对探测器的姿态和轨道进行调整,以保证探测器能按照预想的轨道飞行和调整姿态。
现有的空间探测器GNC系统大多采用阀门线路盒进行驱动控制,通过姿轨控计算机直接发送各类脉冲电平指令,控制阀门线路盒中的驱动电路工作。此种方法将全部的控制工作都集中在姿轨控计算机中,后端线路盒只是简单地执行驱动输出命令,单个姿轨控计算机的处理负担过重,既要采集模拟量又要进行各类运算,还有大量的对外指令接口和驱动控制接口,无法真正满足深空探测任务的自主管理实时性需求和高可靠性要求。鉴于此,本文设计了一种适用于深空探测的GNC系统自闭环驱动控制方法,通过路由选通的方式对功能模块进行路由调度,以实现GNC系统内单机的集中控制和管理,并应用于实际的火星探测任务中。
1 路由选通方案设计
以往的GNC分系统中的控制方式采用GNC计算机、综合线路盒、推进线路盒的单机分体设计方案,其中GNC计算机完成卫星姿态控制软件的算法实现,系统内单机的遥测采集、指令控制输出等一系列工作;综合线路盒实现对各GNC单机的供配电控制及动量轮、磁力矩器的驱动控制;推进线路盒实现对推进分系统压力、温度等重要参数的采集和电磁阀驱动控制。
随着GNC控制算法功能日益复杂,尤其在长距离的深空探测任务中,自主实时控制的要求愈加迫切。为了实现GNC系统对星上各阀门的精准控制和连续喷气控制,同时实现GNC系统各单机的配电控制与设备的遥测参数采集,使GNC计算机专注于控制算法的执行,需要一种能够对整个GNC系统的控制指令、遥测数据、阀门驱动、配电控制等进行调度的设备。
综合以上的分析,本文设计了一种路由控制方法,以路由控制模块作为整个驱动控制单元的中转枢纽,接收姿轨控计算机发送的遥控指令包以及遥测请求指令包。路由控制模块根据程控指令包,以路由选通的方式通过串口向后端功能模块发送程控指令;同时路由控制模块向后端功能模块周期性地发送遥测请求指令,将各功能模块的遥测信息生成遥测信息包发送至姿轨控计算机。
一个功能完整的路由模块包括总线控制、缓存控制、指令发送/接收控制、异步串口发送/接收控制等功能。路由模块的路由控制功能通过现场可编程门阵列(Field Programmable Gate Array,FPGA)实现,系统结构框图如图1所示。
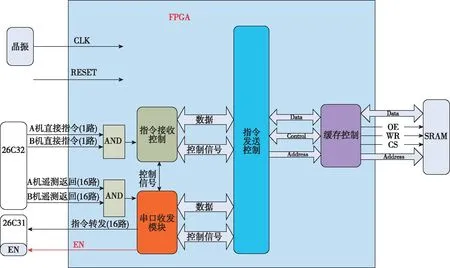
图1 路由控制系统框图Fig.1 Routing control system block diagram
在图1中,缓存控制功能实现FPGA查询访问SRAM请求(FPGA读/写),产生读/写SRAM时序,实现FPGA正确读/写SRAM数据的功能。串口收发模块,按照RS422通信协议规定的格式,FPGA将并行数据进行并转串处理并输出,接收串行数据进行串转并处理并缓存。指令发送控制实现FPGA对输入的三类指令进行识别,并执行不同的发送流程。指令接收控制功能,FPGA通过异步串口接收自GNC计算机的指令,对指令内容进行解析和合法性判断,并写入缓存。指令若合法,则根据解析出的路由地址向相应通道转发;若不合法则丢弃该指令。指令路由的流程图如图2所示。

图2 指令路由流程图Fig.2 Instruction routing flowchart
路由控制模块中存有一张路由表,在每次收到指令包后,通过判断指令数据包头的应用过程识别符(Application Process Identifier,APID)值来更新路由表,并转发数据至后端对应的功能模块。APID共11位,挂在串行总线上的各终端均对应有唯一的APID号,用于识别指令信息的目的地和遥测信息的源地址。如图3所示。
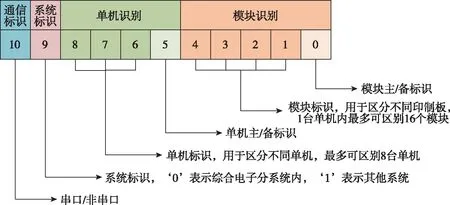
图3 APID规则示意图Fig.3 APID regulation diagram
路由控制模块通过识别本模块的主备标识,使用主份或备份电路转发来自姿轨控计算机的指令包,或收集后端各功能模块遥测数据上传至姿轨控计算机。同时,设计中具备数据错误重传机制,向功能模块发送指令数据后,若在1ms内未收到所述各功能模块的反馈信号或收到的反馈信号为错误信号标识,路由控制模块会再次向对应功能模块发送指令数据。
路由控制模块遥测数据处理流程如图4所示,路由模块中的FPGA识别到遥测请求包后,先从缓存中依次读取单机内各功能模块的遥测数据,并按照各模块标识更新包头信息后顺序发送至姿轨控计算机;在完成遥测数据发送后,将遥测请求包群发至后端各功能模块,然后接收各功能模块的遥测返回数据,并存入缓存进行数据更新,等待下一次的遥测请求。
路由选通方式不仅简化了对外接口,方便功能模块的统一管理,更重要的是在探测器深空机动或者火星捕获时,一旦GNC驱动单元的主机或备机故障,可以通过软件策略发送一条路由表切换指令,即可实现故障模块的主备切换而无需整机切换,有效节省了GNC系统的控制响应时间,提高了任务完成的可靠性。

图4 路由模块遥测群采处理流程框图Fig.4 Telemetry group acquisition of routing module flowchart
2 GNC驱动控制单元设计方案
2.1 整机方案概述
为了更适配于深空探测任务,一个完整的GNC驱动控制单机包含电源模块、路由控制模块以及一系列可扩展的功能模块,各模块间使用CPCI内总线进行信号的互联互通。路由控制模块作为GNC计算机与内部功能模块间数据的桥接模块,主要负责接收GNC计算机发送的数据,以路由选通的方式向后端功能模块转发程控指令包,接收后端各功能模块遥测数据并组包外发;各功能模块完成指定的功能,如模拟量采集与处理、脉冲指令发送、执行飞行器的喷气驱动控制、自锁阀管路的驱动控制,以及对系统各单机供配电控制等。整个单机有两套完全独立的电路,可同时双热机工作,或者通过外部指令切换到冷机工作模式。路由控制模块通过路由表切换指令,对单机的主份或备份功能模块进行数据的路由转发控制。图5给出了GNC驱动控制单元的构架方案。

图5 GNC驱动控制单元组成框图Fig.5 GNC drive control unit block diagram
2.2 功能模块设计
1) 遥测采集模块设计
遥测采集模块包含电压量遥测采集和温度量遥测采集,在选通信号控制下,遥测通道和不同单机的地线均通过1个16选1的多路开关切换。遥测信号和对应地线经差分运放隔离后送A/D芯片进行转换,差分运放可实现地线隔离。遥测模块中的FPGA识别到遥测请求包后,从缓存中读取经转换的遥测数据,并按照模块标识增加包头信息后发送至路由控制模块;FPGA在完成遥测数据发送后,开启遥测采集操作,将采集的数据更新至缓存,等待下一次的遥测请求。
2)指令功能模块设计
指令模块接收路由控制模块的串行数据,根据通信协议进行译码,并驱动OC门集成电路进行指令脉冲输出,对自锁阀模块或配电模块进行控制。同时在遥测请求指令的控制下,通过异步串口向内总线发送自身遥测状态。指令模块中的指令脉冲宽度最大支持255ms,可通过指令包指令宽度字节位进行配置。指令模块最多支持16条指令包数据的输入,并将指令数据送入指令队列进行排队待输出状态,该功能支持一次接收缓存多条指令,在连续推进变轨喷气时,减少喷气时延,增强稳定性。
3) 喷气驱动功能模块设计
喷气驱动模块接收路由控制模块发来的喷气指令包后,先对包中的数据区有效数据按字节进行和校验,若正确,返回校验数据0xD2D2给路由控制模块;若错误,则弃包,同时返回错误标识数据0x2D2D给路由控制模块。指令包由包头和数据区构成,包头含有该功能模块的主备工作标识信息和数据域的字节长度信息,数据区中包含功能识别信息以及喷气信息,通过依次识别包APID、数据区中功能识别信息后,执行指令包按照各路喷气时长要求发送对应路数的喷气指令,驱动MOS管控制推进系统阀门喷气工作。喷气指令包实现的主要功能如下:
a)喷气驱动模块FPGA判断包中的主备标识后,使用喷气驱动模块的主份或备份按要求执行喷气指令;
b)喷气指令模式可同时执行10路喷气操作,喷气时长范围支持0~255ms可调;
c)本模块收到新指令包时,按新指令包的喷气指令数据更新脉冲宽度数据;
d)指令数据区最后两字节为16比特的和校验数据,该数据由数据区中的所有数据按字异或后得到,用于在接收指令包时判断收包或弃包操作。
3 实际应用分析
在火星探测任务中,路由模块后端实际共设置4个功能模块,分别为遥测采集模块、指令模块、A组喷气驱动模块和B组喷气驱动模块,因此实际使用4路功能终端。通过路由模块对各功能模块进行有效调度,调度控制示意图如图6所示。
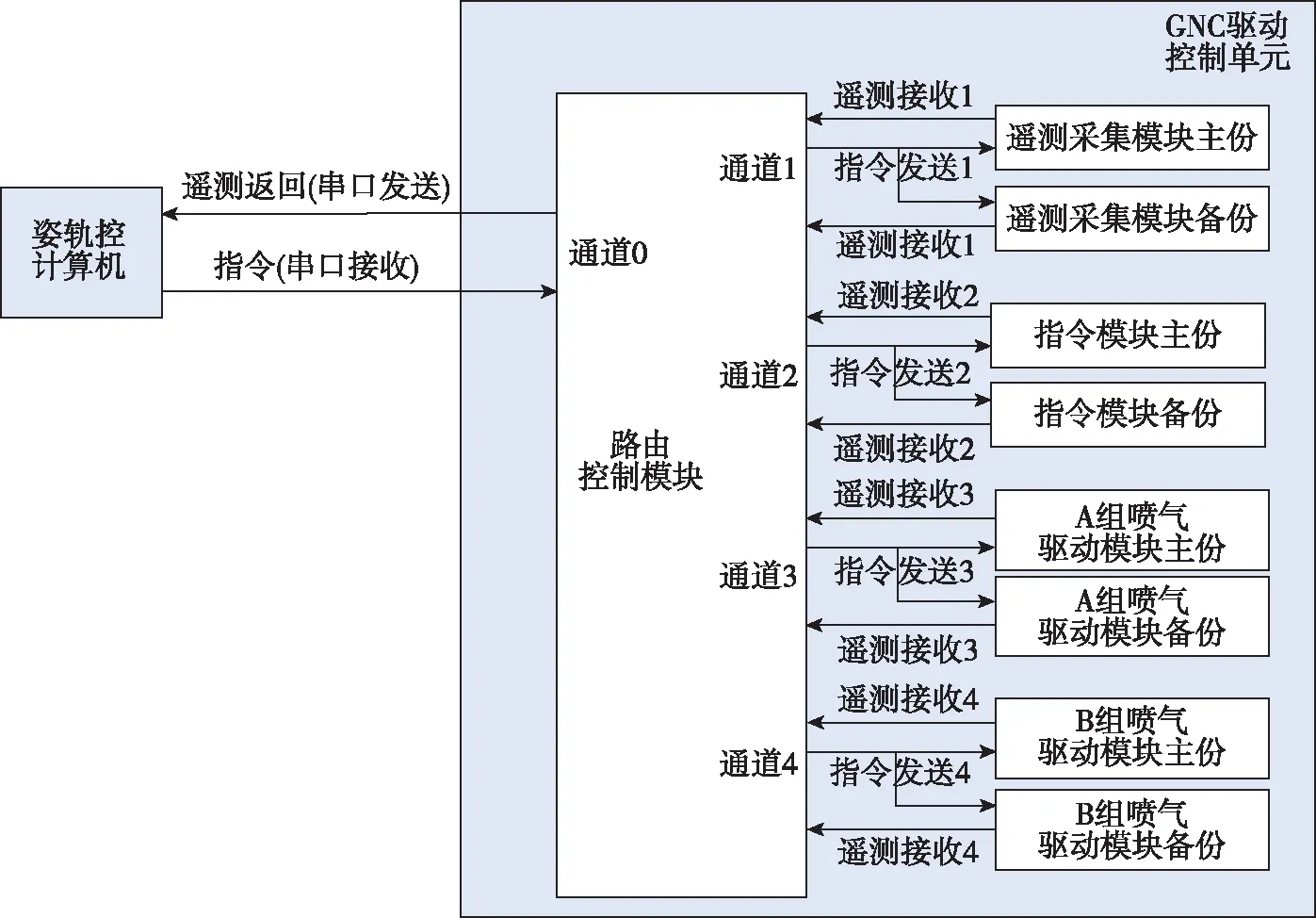
图6 GNC驱动单元路由控制原理示意框图Fig.6 Route control principle of GNC drive unit diagram
在双热机工作模式下,GNC计算机根据实际需要发送更改路由表指令,以选择向不同模块的主机或者备机转发指令数据,路由表指令的数据区域一共2个字节,分别对应16个返回通道,火星任务中的功能模块路由表指令配置如表1所示。

表1 功能模块路由表指令配置说明Tab.1 Function module routing table instruction configuration description
路由模块的路由表初始状态工作在主份模式,通过识别指令包的APID,实时路由转发至对应功能模块的主份或备份,随后执行指令。因此,针对火星探测任务可以灵活配置路由的形式,当任一功能模块主份或者备份发生故障时,GNC计算机通过判断返回的故障代码数据0x2d2d,及时切换路由表,并由各功能模块即刻执行操作。表2和表3列出了两种在轨故障模式下路由切换的使用方式。当路由控制模块自身主份故障时,可由GNC计算机判断后自主切换至备份,由备份对后端模块的数据进行路由转发工作,且后端模块始终工作于主份机;当某一功能模块,如A组喷气驱动模块主份出现故障,由路由控制模块主份通过切换路由表将指令数据路由转发至A组喷气驱动模块备份,以执行后续操作。这样能够实现模块间的路由数据无缝切换与灵活调配,而无需进行整机切换(所有模块从主机切换至备机),进一步增强了系统控制的实时性和可靠性。

表2 在轨故障模式下路由使用情况1(路由模块主份故障)Tab.2 Routing usage on orbit failure mode 1(Routing master module failure)
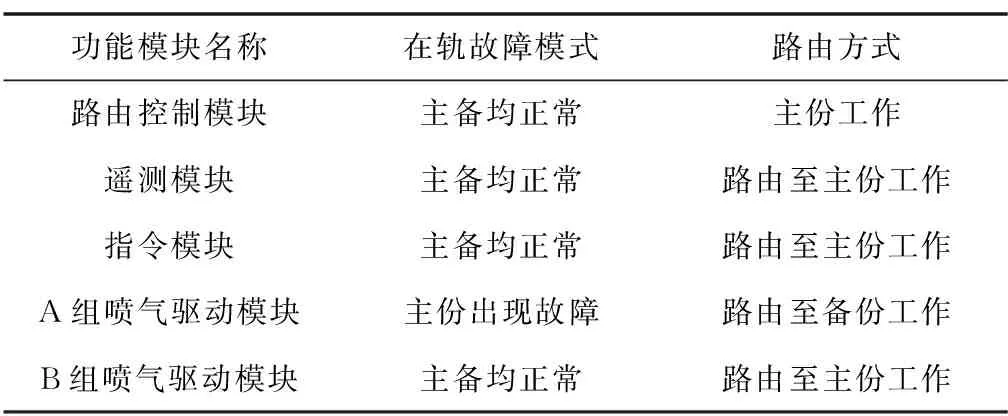
表3 在轨故障模式下路由使用情况2(A组喷气驱动模块主份故障)Tab.3 Routing usage on orbit failure mode 2(Group A jet drive master module failure)
GNC驱动控制单元是根据深空探测任务需求而全新研制的,相比以往卫星的GNC驱动控制方式,路由选通的控制方式具备更好的机动性,可靠度和集成度更高,扩展性更好,两种控制方式主要功能指标对比情况如表4所示。从表4中可以看出,GNC驱动控制单元增加了遥测和指令的处理,并且对于阀门的驱动控制采用了尺寸更小、驱动能力更强的MOS管,通过一对串口线缆就能实现GNC计算机与整个GNC分系统的互联互通,使用更为方便可靠。
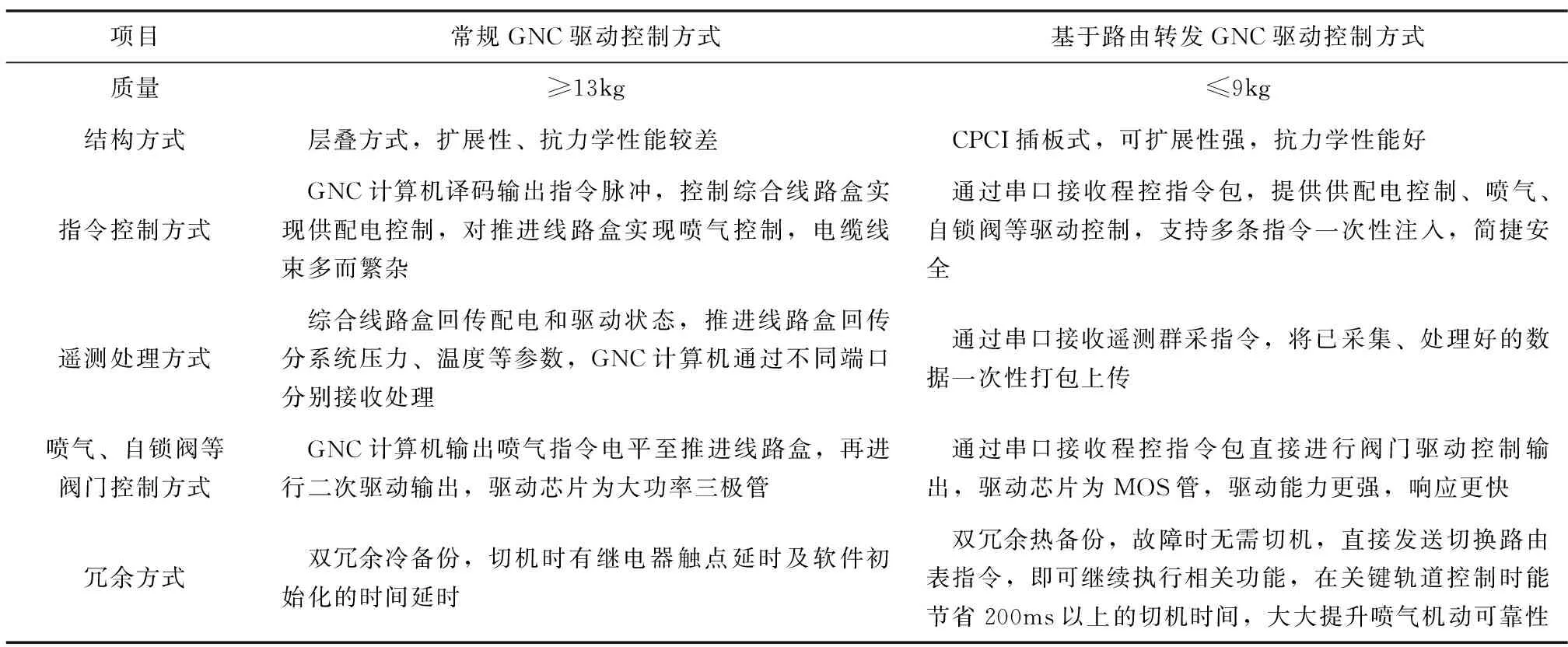
表4 两种控制方式对比情况Tab.4 Comparison of two control modes
火星探测任务期间,GNC分系统实施了一系列的阀门驱动控制:驱动25N推力电磁阀进行姿态控制,驱动120N推力电磁阀进行一般轨道控制,驱动3000N自锁阀进行制动捕获的关键轨道控制。在实施姿态调整期间,对25N和120N电磁阀进行了连续喷气操作,最多6个电磁阀同时执行喷气动作,喷气时间持续15min,每次喷气时长0.2s,安全可靠地确保了探测器在地火轨道转移、火星捕获等一系列驱动控制操作的成功执行,证明了基于路由转发技术的GNC系统驱动控制方法的有效性和可靠性。
4 结 论
为满足深空探测中对GNC系统高可靠和自主控制的需求,本文设计了一种路由转发驱动控制的方案,该方案以路由转发为主节点,执行功能模块为从节点,能够对系统内及系统间单机进行集中控制和管理,自主控制性高、扩展性强,对外接口更清晰,降低了系统设备间电缆连接复杂度,减轻了姿轨控计算机端的负担。方案中的路由配置切换模式和指令错误重传机制,大大提高了驱动控制的可靠性,在火星探测任务的全过程中,有效验证了该方案的稳定性和功能性。