某型飞机电传操纵系统纵向通道典型故障分析
2022-08-26李东起刘宏宇胡禹空装驻大连地区军事代表室
■ 李东起 刘宏宇 胡禹/空装驻大连地区军事代表室
0 引言
某型飞机操纵系统是一个以电传操纵为主、机械操纵为辅的“电传+机械”混合操纵系统,共有6个操纵通道,分别为纵向操纵通道、横向操纵通道、航向操纵通道、襟副翼操纵通道、前缘襟翼操纵通道、极限限制通道。纵向操纵为纯电传操纵,控制水平尾翼同步偏转,横向操纵通道控制水平尾翼差动偏转,航向操纵通道控制方向舵同步偏转,这三个通道均采用了余度技术。襟副翼操纵通道控制襟副翼同步偏转,前缘襟翼操纵通道控制前缘襟翼同步偏转,极限限制通道对驾驶杆的俯仰操纵进行限制。
1 纵向通道的组成及工作原理
1.1 组成
电传操纵系统的纵向通道能够控制左右平尾同步偏转,用于俯仰操纵。纵向通道的组成包括:俯仰杆位移传感器、俯仰角速度传感器、法向过载传感器、动压传感器、静压传感器;电传操纵计算机内部的传动比自动修正计算机、俯仰计算机、俯仰反馈计算机和平尾伺服放大器;舵机。
1.2 工作原理
纵向通道原理结构如图1所示。
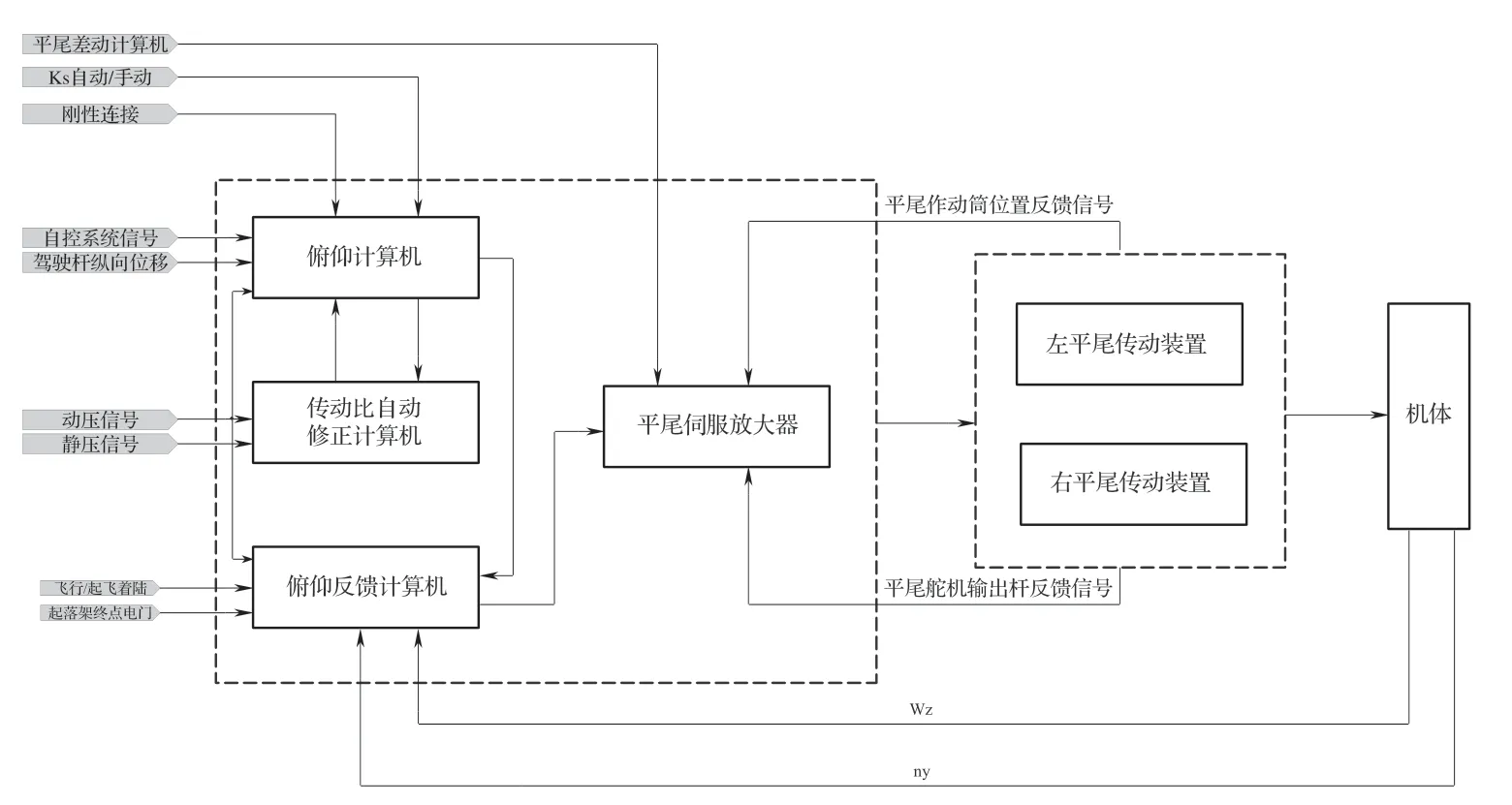
图1 纵向通道原理结构图
传动比自动修正计算机根据动压信号和静压信号对俯仰驾驶杆位移量到平尾偏转量的传递系数ΔKш进行自动调节,在ΔKш修正信号表决后(杆修正BKШ表决器),再与俯仰计算机传送过来的俯仰杆位移传感器输出信号Xp相乘,得到ΔKs·Xp信号输入俯仰计算机。
俯仰计算机根据电传控制盒的“传动比手调”开关状态将人工Kш信号(手调方式)或来自传动比计算机的自动KШ信号(自动方式)与标称传动比进行综合。在飞行状态下,对飞行员的操纵量进行限制,然后根据动压信号自动对操纵指令进行软化,限制操纵信号的变化速率;在起飞/着陆状态下则不进行限制。信号经俯仰计算机表决器表决后,输入俯仰反馈计算机。
俯仰反馈计算机接收来自俯仰计算机的纵向操纵信号,与经动压信号修正后的ωz和ny反馈信号进行综合,形成最终纵向通道操纵信号。该信号通过俯仰2表决器(BT2)表决后送到平尾伺服放大器的输入端。在俯仰反馈计算机中还利用无触点转换装置,根据电传控制盒上的对应开关位置接通各种工作状态的电路:起飞-着陆、飞行、自动、硬连接。
每个通道有两个平尾伺服放大器,分别用于左右平尾舵机的驱动与控制,其与平尾舵机、平尾作动筒及相应反馈传感器构成纵向通道舵回路,实现对平尾舵机及平尾偏转的伺服控制。平尾伺服放大器同时接收俯仰反馈计算机和平尾差动计算机的输出信号,与平尾作动筒位置反馈信号综合后送入左右伺服放大器表决器表决,表决后的信号再与平尾舵机反馈信号综合,送入驱动电路,最后送到平尾舵机的控制端。
纵向通道还接收从自动控制系统来的纵向控制信号,在自动控制系统自动操纵飞机时,作为自动控制系统的执行机构。
2 纵向通道典型故障分析
2.1 传感器故障
1)故障现象
飞行过程中,飞行员反映I通道信号灯亮,且无法手动按灭。着陆后地面模拟发现I通道计算机面板上ВКШ灯亮。
2)故障原因分析
导致故障的可能原因有:对应通道电传操纵计算机内部传动比自动修正计算机故障;静压传感器故障;动压传感器故障。
3)故障排查过程
先将I通道计算机和Ⅱ通道计算机对调检查,故障依旧,说明该通道的电传操纵计算机(包括其中的传动比自动修正计算机)良好。然后将静压传感器I、Ⅱ通道的插头对调进行检查,故障没有转移至Ⅱ通道,说明该通道的静压传感器良好。
通过以上排查,故障初步定位在动压传感器上。
动压传感器内部结构如图2所示,由底座、壳体、弹性膜片、传感线圈、铁芯和衔片组成。铁芯上绕有一组线圈,该线圈相当于输入线圈,将铁芯放置在线圈中央圆柱孔中,两个带有铁芯的线圈构成线圈组,线圈组分为初级线圈和次级线圈,初次级线圈间有衔片。在进气口气体动压作用下,弹性膜片产生形变,推动衔片上下移动,使初级线圈和次级线圈间的互感发生变化,次级线圈上的电压随之变化,并作为传感器的输出信号输出电压。

图2 动压传感器结构图
4)故障定位与排除
针对故障点对动压传感器进行以下检测。
检测电源供电电压交流36V/2400Hz,测试结果为35.8V/2401Hz,电源供电正常。用100V兆欧表分别测量传感器的所有插针相对于壳体、插针1相对于插针3、插针2相对于插针4的绝缘电阻应不小于20MΩ,检测结果均为无穷大。供电情况下检测动压传感器的输出电压,各给定气压差对应的输出电压值均不符合要求,且超差较大,无线性变化规律。从动压传感器的结构和工作原理分析,结合故障现象,考虑故障原因为其内部弹性膜片变形,导致次级线圈上的输出电压不符合要求。
更换动压传感器内部膜片后调整衔片,输出电压符合要求。
2.2 俯仰反馈计算机故障
1)故障现象
试车至压力为200kg/cm2以上时,电传控制系统第Ⅳ通道信号灯亮,按压该信号灯按钮灯不灭。
2)故障原因分析
该故障原因可能为:俯仰角速度传感器故障;法向过载传感器故障;第Ⅳ通道电传计算机故障。
3) 故障排查过程
先交换故障通道俯仰角速度传感器与其他通道的插头,故障未消失;然后交换故障通道法向过载传感器与其他通道的插头,故障未消失;更换Ⅳ通道电传计算机后,故障消失。
经过以上排查,故障初步定位在Ⅳ通道计算机上。
针对故障点对该通道计算机进行以下检测:采用内场专用检测设备对该Ⅳ通道计算机进行通电检测,发现计算机前面板ВТ2灯发亮报故;进一步检测发现,“起飞-着陆”状态下俯仰反馈计算机定中心时,设备“K13”端子的输出电压超差,电压值应为(1.3±0.2)V,实测值为0.7V;调整俯仰反馈计算机定中心电位计,输出电压无变化。更换俯仰反馈计算机后,故障现象消失。
4)故障定位与排除
俯仰反馈计算机用于在纵向通道中引入反馈信号——俯仰角速度和法向过载,反馈信号有阻尼增稳作用,可以改善飞行品质。根据俯仰角速度、法向过载和动压对控制信号进行修正,并将控制信号送到平尾伺服放大器;根据电传控制系统工作状态,形成工作转换指令,在自动状态下根据起落架收起终点电门控制信号,自动进行起飞(着陆),完成飞行状态的转换。
动压信号由R32和R43分别进行动压斜率和定中心调节后,进入148板的X34:7、X34:10经信号处理后,由148板送入ВТ-457:А11和ВТ-457:Б21,再分别经过D1信号综合和A2乘法器、D6信号综合和A1乘法器,通过起飞着陆开关经D7运放比例限幅电路后,送入D8比较器与其他通道的表决输出信号进行电压比较。若差值超出门限电压值,ВТ-457:А6输出高电平,信号分两路,一路经过ВТ-457:Б6送入检测设备,报ВТ2故障;另一路送入产品机箱中的K-45(X28:9),在K-45(X28:6)点亮产品前面板上的“ВТ2”灯,报故灯点亮(ВТ-457故障)。
从图3可知,电传计算机前面板电位计R7、R8、R9、R11对ВТ-457电路板进行调整,其中R7调整ωz信号斜率、R8调整ny信号斜率、R9调整ny信号中心、R11调整俯仰计算机中心。产品在内场检查调整电位计R11时,电传计算机测试仪“K13”端子的输出电压为固定值,不受控制,对应ВТ-457电路板Б4引脚为调整R11输入端。对应调整元件为ВТ-457电路板D7运算放大器。经测量D7输入端电压会随着R11电位计的变化而变化,但是输出端电压一直不变,更换后产品性能合格。

图3 反馈计算机电路原理图
2.3 平尾伺服放大器故障
1)故障现象
电传控制系统第Ⅱ通道灯亮,通道计算机面板上УСП灯亮。
2)故障原因分析
观察第Ⅱ通道计算机面板,其上УСП亮。分析可能原因有:相应电传计算机平尾伺服放大器失效;舵机反馈传感器电路故障;РПД舵面传动装置失效。
3) 故障排查过程
将I、Ⅱ通道电传计算机互换,故障转移到第一通道上;更换Ⅱ通道电传计算机右侧平尾伺服放大器,故障消失。
根据以上排查,故障初步定位在第Ⅱ通道计算机的平尾伺服放大器上。
4)故障定位与排除
平尾伺服放大器接收俯仰反馈计算机的输出信号,并与平尾作动筒位置反馈信号综合后送入左右伺服放大器表决器表决,表决后的信号再与平尾舵机反馈信号综合,送入驱动电路,最后送到平尾舵机的控制端。
从图4可以看出,电传计算机前面板电位计R17、R18、R19、R20对右平尾伺服放大器进行调整,R17调整右伺服放大器反馈传感器信号斜率、R18调整右舵传动机构反馈传感器信号斜率、R19调整右伺服传动机构中心、R20调整右舵传动机构中心。产品在内场检查右伺服放大器УС-80电路板,在通过调整R20调整右舵传动机构中心时,无法调整右侧伺服放大器УС-80电路板输出,电传计算机测试仪“K20”端子的输出电压为一固定值。进一步分析右侧伺服放大器四路限流器输出电压值,发现限流器输出1值大于其他三路限流器输出。表决器由限流器支路组成,每个通道的表决器输入是一致的,在各通道表决器参数和结构一致的情况下各通道表决器的输出也应是一致的,因此四路限流器输出应一致,电压不应相差太大。限流器由二极管矩阵和信号源电阻与负载电阻组成,进一步测量该路限流器二极管矩阵,发现该二极管矩阵故障,更换后产品性能合格。
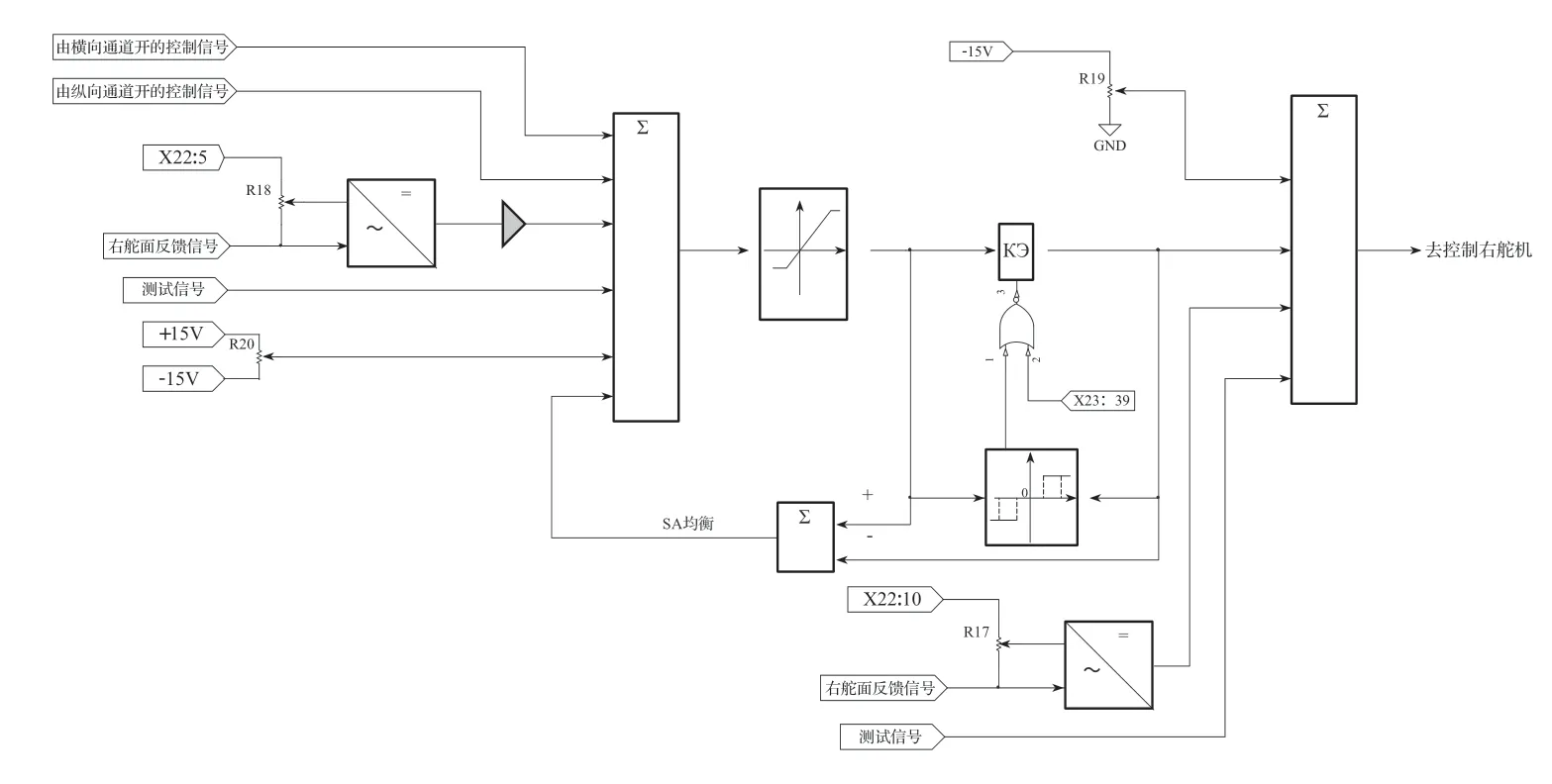
图4 УС-80(右)电路原理图
