无人机载三维激光扫描技术在露天矿山测量中的应用
2022-08-25闫魏力王洛锋
闫魏力,张 驰,王洛锋
(1.矿冶科技集团有限公司; 2.国家金属矿绿色开采国际联合研究中心; 3.洛阳栾川钼业集团股份有限公司)
引 言
露天矿山测量工作的主要目的是获取地质地形数据并为地质勘探、储量计算及采矿设计提供基础数据[1-2]。露天矿山生产过程中,一系列的测量工作不可避免,其主要包括边坡测量、排土场测量、矿石堆测量、地形测量、各种变形位移测量、各种管线及建筑物测量等[3-6]。
传统露天矿山测量通常依靠全站仪或RTK采集矿山采剥面轮廓的转折点坐标,进而来表征露天矿山特征,测量精度低、表征数据量较少,以此构建的三维模型准确性低且主观性大,严重影响成果质量[7-9]。另外,由于露天矿山采场范围大,生产效率高,测量任务势必十分繁重,传统手段测量效率低已很难满足当前露天矿山快速测量的要求。因此,为了能够快速获取露天矿山全面而准确的数据信息,满足露天矿山高效高精度的测量要求,采用更加先进的测量技术开展露天矿山测量工作十分必要。三维激光扫描技术的出现从根本上改变了大家对于矿山测量的认知,弥补了传统测量方法在露天矿山测量过程中所暴露的测量效率低、准确性差等问题。采用三维激光扫描技术可实现露天矿山的实景复制测量,不仅具有非常高的测量精度,而且大大提升了测量效率,获得的信息也非常全面,最重要的是其时效性显著提高。无人机载三维激光扫描技术作为三维激光扫描技术与无人机技术的深度结合,进一步拓展了三维激光扫描技术在露天矿山扫描中的适用性,特别是针对露天矿山海拔高易受雾气影响、境界范围大测量工作较难开展及境界落差大对设备性能要求较高等特点,该项技术可较好地满足测量要求,高效获取露天矿山全面而精确的测量数据[10-18]。
某露天矿山矿区范围为标准山地地形,地势起伏较大,露天境界设计底部标高-498 m,露天开采境界范围内最大落差近500 m,设计最终边坡角为45°。露天矿山所在范围天气条件较为恶劣,夏季多阴雨、暴雨天气,冬季多雾。
本文针对该露天矿山特殊的工况条件,采用无人机载三维激光扫描测量系统对其采场范围进行了精细化扫描测量工作,构建了完整而翔实的露天矿山三维实体模型,在充分进行精度验证的基础上进行了矿山收方应用,快速获得了该矿山多期爆破后的矿石量变化情况,为矿山生产计划的及时调整和储量动态管理提供了高精度原始数据,提高了露天矿山的技术管理水平。
1 无人机载三维激光扫描测量系统
无人机载三维激光扫描测量系统整体包含2部分:一部分为无人机飞行平台;另一部分为机载激光雷达。其中,飞行平台为1架六旋翼、大负载、长续航曜宇Yunux-Long无人机,空载续航时间为2 h,负载8 kg情况下续航时间约为1 h。无人机操作系统通过无线基站与无人机飞行平台建立连接,最远监测距离为15 km。机载激光雷达的型号为ARS-1000,该激光雷达采用RIEGL-1000激光扫描模块,其最大测量距离为920 m,绝对测量精度±5 cm,质量5 kg,最大有效测量速度为500 000点/s,采用最先进的多次回波技术,适用于植被茂密区域的地形测量。无人机载三维激光扫描测量系统组成如图1所示。

图1 无人机载三维激光扫描测量系统组成
2 数据采集及三维建模
2.1 外业数据采集
根据露天采场现场情况,本次研究选定实际扫描范围约为长1 600 m,宽1 600 m,设置飞行高度相对扫描范围内最高处约120 m,覆盖飞行面积约1.8 km2,地面采样距离4 cm。无人机载三维激光扫描测量系统可覆盖的测区范围如图2所示。

图2 无人机载三维激光扫描测量系统可覆盖的测区范围
2.2 数据解算处理
通过现场数据采集得到原始格式的测区三维点云数据文件,由于测量系统采用的是WGS84坐标系统,而矿山制图一般采用的是西安80或国家2000坐标系统,因而借助配套的数据解算软件执行坐标系统转换及三维点云数据融合等操作,得到露天采场在国家2000坐标系统下的真实坐标三维点云模型(如图3所示)。

图3 露天采场三维点云模型
2.3 采场三维建模
以上述露天采场三维点云模型为基础,按照点云滤波、去噪、抽稀及构建DTM网格的一般建模流程构建露天采场三维实体模型,如图4所示。

图4 露天采场三维实体模型
3 扫描精度验证
无人机载三维激光扫描工作由于受到无人机飞行时风流扰动、飞行较高时云层遮挡及地表反射强度参差不齐等因素影响,导致扫描数据可能与实际露天采场台阶存在一定偏差。为了避免误差较大而影响后期数据使用的效果,有必要针对现场扫描获得的数据进行精度验证。为此,本文从2个角度对现场扫描的数据精度进行分析:一是基于三维点云数据本身的区域性偏差分析;二是基于三维实体模型的典型剖面相似性分析。上述2种分析方式所采用的参考模型均为基于RTK测量建立的露天采场三维模型,如图5所示。

图5 基于RTK测量建立的露天采场三维模型
3.1 区域性偏差分析
现场扫描获得的露天采场三维点云数据经解算融合后将得到与实际露天采场形态及坐标位置完全一致的三维点云模型,将该模型与基于RTK测量得到的露天采场三维模型进行复合,得到复合模型(如图6-a)所示),通过区域性分析算法可得到扫描三维点云与实体模型间的偏差数据(如图6-b)所示)。

图6 扫描三维点云与实体模型的区域性偏差分析
由图6-b)的分析结果可知,扫描点云与实体模型间整体偏差基本位于±23.152 mm,误差较小。
3.2 典型剖面相似性分析
将基于扫描三维点云模型建立的露天采场实体模型数据与基于RTK测量得到的露天采场三维模型进行复合,得到复合模型(如图7所示)。按照图7中预设的2条剖面线切割复合模型并提取剖面线特征点坐标,将2组剖面线特征点坐标数据分别拟合得到如图8所示的相似性曲线。
由图8的相似性分析结果可知:典型剖面特征曲线相似度较高,基于扫描三维点云建立的露天采场三维模型与基于RTK建立的露天采场三维模型能够较好的吻合,满足测量要求。

图7 扫描三维模型与真实三维模型复合图

图8 典型剖面相似性分析
经过以上2个角度的分析,该无人机载三维激光扫描测量系统扫描精度较高,相对测量精度优于5 cm,能够较好地满足露天矿山测量要求。
4 方量验收计算
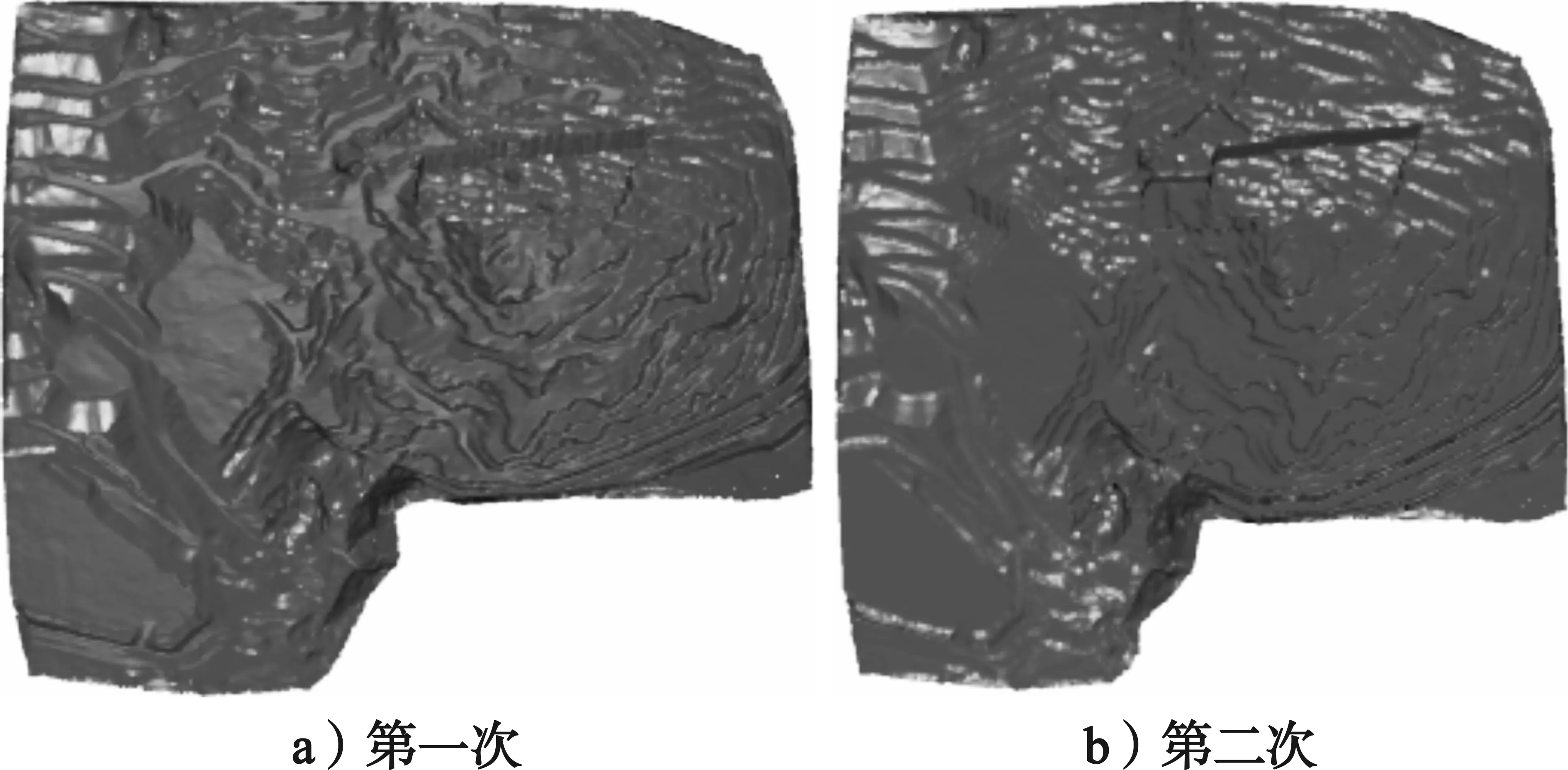
图9 露天采场三维激光扫描点云模型
采用上述无人机载三维激光扫描测量系统先后2次对该露天采场北部某区域爆破铲装后的边坡台阶进行了扫描,得到露天采场三维激光扫描点云模型,如图9所示。 基于上述三维点云模型,建立两期露天采场三维实体模型,如图10所示。

图10 无人机载扫描露天采场三维实体模型
将第一次扫描建立的露天采场三维实体模型与图4中实施爆破前的露天采场三维实体模型进行复合,计算爆破开挖量分别为93 713.88 m3和136 951.58 m3,如图11所示。

图11 爆破前后露天采场扫描三维实体模型复合
5 结 论
1)采用无人机载三维激光扫描测量系统对某露天采场进行了扫描,快速获得了完整的露天采场三维点云模型,并以此为基础建立了露天采场三维实体模型。
2)分别采用区域性偏差分析和典型剖面相似性分析2种方法验证了无人机载三维激光扫描测量系统扫描数据的准确性,结果表明该系统相对测量精度优于5 cm。
3)基于验证后的无人机载三维激光扫描测量系统对该露天采场分别开展了2次扫描测量工作,高效且准确地计算出爆破前后的矿石开挖量。
4)无人机载三维激光扫描测量系统能够较好地适用于露天矿山大场景测量,可以显著提高测量效率,弥补传统测量方式存在的不足,对于推动露天矿山测量工作的发展具有重要意义。