车辆运行品质的智能手机检测方法及姿态误差矫正
2022-08-25从建力高鸣源
陈 嵘 ,从建力 ,高鸣源 ,王 源 ,王 平
(1.西南交通大学高速铁路线路工程教育部重点实验室,四川 成都 610031;2.西南大学工程技术学院,重庆400715;3.南方科技大学系统设计与智能制造学院,广州 深圳 518055)
截至2019年底,我国城市轨道交通运营里程达到6 730.27 km,为及时、准确地检测城市轨道交通的轨道状态,保障地铁车辆运营的安全性及乘坐舒适性,目前周期性的轨道状态检测方法已不满足需求[1].对列车运行状态的准确掌握一方面可为车辆维修提供依据,另一方面也是轨道线路养护维修的重要依据,其中,对列车车体加速度准确、经济、便捷的检测成为一个新的研究热点[2].
车辆运行品质主要与车体振动幅度、频率、方向和持续时间有关.如果人体长时间处于车辆的振动环境中,则会出现诸如肌肉骨骼、颈肩、前庭神经系统不适等疾病,根据美国铁路系统的统计数据,大多数机车驾驶员患有背痛或背部相关疾病[3].为实现车辆运行品质和轨道状态的实时监测及降低监测成本,各国学者提出在运营车辆的轴箱、转向架、车体不同位置安装多种传感器(加速度传感器、麦克风)[4].文献[5]在上海地铁1号线地铁车辆的转向架、车体上安装加速度传感器,对检测数据进行低通滤波与二次积分获取轨道垂向、横向不平顺数据,该方法可为轨道线形检测、演变规律及制定维修计划提供数据支撑.文献[6]成功研制了运营车辆车载监测系统,集多种传感器融合检测钢轨波磨、轨道不平顺等,实现高频次检测轨道状态与实时预警,确保运营车辆行车安全.文献[7]在轻轨车辆上安装多类型传感器,获取16个月内车体振动加速度数据,结合数据融合方法分析轨道基础结构健康演变规律.
上述车载检测系统可准确识别影响车辆运行品质的异常轨道状态,但该方法依赖于整套传感系统,检测系统购买、安装、维护成本过高,数据采集过程较为复杂,难以应用于所有的运营列车[8-9].同时,既有轨检车的周期性检测显然不满足运营任务日益繁重的轨道交通系统的需求[10].当前智能手机计算处理性能的不断提升,为不断提升用户的体验质量,其内置了加速度传感器、陀螺仪等,且具有便携性、续航久等优点,将手机用作一种测量设备的理念已经为研究者广泛接受.在智能交通运输领域,智能手机的应用已经较为广泛,且具有较高的置信度,例如基于手机传感器数据的乘坐舒适度的评价[11]、交通流拥挤状态识别[12]、监督司机驾驶行为[13]等.
为弥补当前轨道交通领域周期性检测的空白期,本文提出一种基于智能手机感知车辆运行品质的检测方法,为保证手机坐标系与车辆坐标系平行一致,研究了智能手机姿态误差矫正算法,主要思路是以重力方向为参照矫正垂向姿态误差,再结合纵向与横向加速度的正交性,基于极大似然原理对手机坐标系相对于车体坐标系在xy平面的角度偏差进行估计.同时,借助现场测试验证智能手机姿态误差矫正算法的准确性和传感器性能的可靠性.该方法打破了智能手机检测车辆加速度的过程中对手机摆放姿态的依赖,从而促进智能手机测评车辆运行品质的应用,可为轨道交通领域提供一种经济、便捷、高效的车辆振动检测设备.
1 智能手机姿态矫正基本原理
为验证智能手机在轨道交通领域中检测车体振动加速度的可行性,需保证智能手机使用的便捷性及其传感器检测精度.本文具体研究路线如图1所示,其中,“数字地铁”APP开发和数据预处理等工作已完成,可参考文献[14].本文定义车体横向振动为Y方向,以行驶方向右侧为正;纵向振动为X方向,以行驶方向为正;垂向振动为Z方向,向上为正.智能手机内置的三轴加速度传感器检测模块,手机平面自底端至顶端指向为x正方向,从左至右为y正方向,垂直于屏幕向外为z正方向,如图2所示.

图1 智能手机检测车体加速度研究路线Fig.1 Route of car body acceleration detected by smartphones
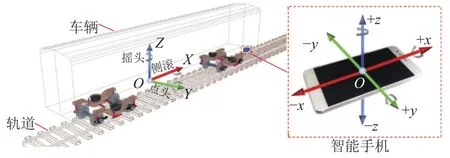
图2 车辆坐标系与手机坐标系Fig.2 Vehicle and smartphone coordinate systems
理想情况下,测量过程中智能手机的端部指向车辆运行方向,手机屏幕平行于车厢地板,此时手机坐标系与车体坐标系将保持一致.随着车辆运行,车体产生的振动传递到手机,进而被手机内置的加速度传感器记录.然而完全保持智能手机坐标系与车体坐标系平行一致是十分困难甚至是不切实际的,后文将介绍一种数学模型矫正手机姿态误差,智能手机可随机放置在车厢地板表面,保证智能手机检测的便捷性.
1.1 手机垂向姿态矫正
为了提升智能手机检测车体加速度的便捷性,测量过程中不采用特殊方法来保证手机坐标系与车体坐标系的平行,仅保证测量时两个坐标系统各坐标轴的近似平行即可.
实测手机输出为三轴加速度,可用向量(ax,ay,az)表示,车体坐标系下的三向加速度值表示为 (aX,aY,aZ).矫正过程分为两部分,其一是垂向加速度的矫正,其二是横向与纵向加速度矫正,如图3所示,图中平面 ① 为手机坐标系xy平面,平面 ②为车体坐标系XY平面, φ 为旋转角;v为智能手机三向加速度的姿态向量.
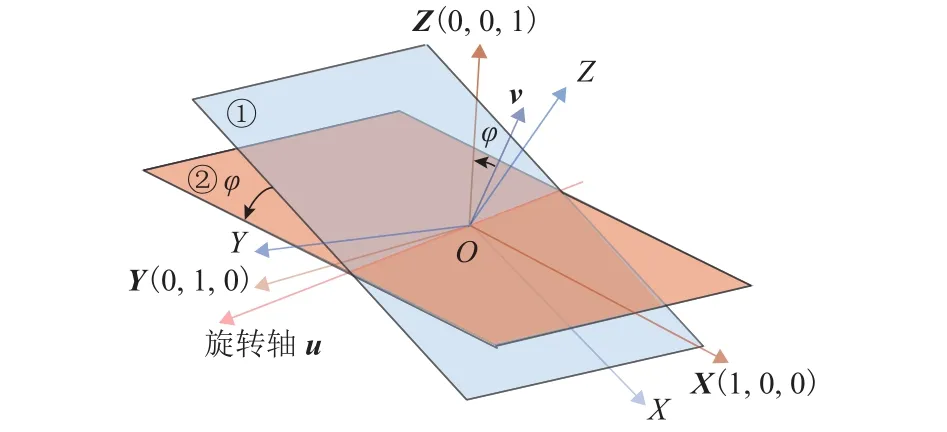
图3 垂向姿态偏差示意Fig.3 Deviation of vertical coordinates
智能手机相对于车体坐标系存在角度偏差,车辆进站停靠时,三方向加速度的合矢量为重力加速度,v= (xg,yg,zg)T,则有

式中:xg、yg、zg分别为重力加速度在智能手机x、y、z坐标中的3个分量.
车体坐标系垂向单位向量Z=(0,0,1) ,将手机姿态向量v旋转到垂向单位向量Z,确定变换矩阵R,使得满足式(2)所示关系.

根据罗德里格旋转公式有

式中:旋转轴u为单位向量Z与手机姿态向量v叉乘,并进行归一化:
K为旋转轴的叉乘矩阵,

由图3可知:旋转角 φ 为单位向量Z与手机姿态向量v的夹角:

1.2 手机横向和纵向姿态矫正
对于车辆静止时的加速度测量样本,经垂向加速度矫正后,垂向加速度值为重力加速度,这意味着手机坐标系的xy平面与车辆坐标系的XY平面平行.在车辆运行时,垂向加速度修正可以保证测量的纵向x、横向y加速度在0上下波动,并且横向与纵向加速度不包含垂向振动分量.理想情况下,手机平面坐标系与车体平面坐标系方向平行且一致,但在手机测试过程中,手机平面坐标系与车体平面坐标系存在角度偏差,如图4所示, θ 为两个坐标系偏差角.

图4 手机坐标系与车体坐标系角度偏差示意Fig.4 Angle deviation between smartphone and car body coordinate systems
在未修正时,手机平面坐标系与车体平面坐标系关系如图5所示.

图5 车体坐标系与手机坐标系的偏差Fig.5 Deviation between smartphone and car body coordinate systems
手机测量的x、y方向加速度是车体实际X、Y方向加速度的组合,也即有下面关系:

当 θ =0 时,两个坐标系不存在角度偏差,当θ≠0时,需要找到该偏差角 θ ,并通过坐标旋转,从手机测量数据 (ax,ay)T中获取车体坐标系下的实际振动加速度 (aX,aY)T.
由于缺少两个坐标系的对比基准, θ 的获取是十分困难的.对于列车运行过程中的加速度而言,加速度数据提供了一个可供矫正该误差的参照.列车的纵向加速度主要是由列车的牵引与制动构成,而车体的横向加速度主要是由于通过道岔、平面曲线等原因产生,并考虑到两个方向正交,可以认为没有或有极小的相关性.当 θ ≠0 时,手机检测的x、y方向加速度会因线性组合而产生一定相关性.因而,提出基于车体纵/横向加速度的正交相关性偏差估计方法.两坐标系统纵/横向的偏差角 θ 定义如下:

式中:E(·) 为数学期望; (axθ,ayθ)T为 (ax,ay)T旋转角度 θ 的结果.也即有

为寻求最真实偏转角 θ ,保证旋转角度 θ 后水平向加速度协方差的绝对值最小.考虑到E(ax)=0和E(ay)=0 ,则有

式中:幅值A与相位 γ 定义如式(12).
式中:E(axay) 为ax与ay的协方差;E(-a2x+a2y) 为ax与ay的方差之差.
从式(11)不难看出:当 2 θ+γ =kπ,(k∈Z) 时,两方向加速度的协方差最小.偏差角定义如下:

对于特定手机测量数据 (ax,ay)T,通过式(14)计算不同数据切片的协方差Eˆ(axay) 与方差Eˆ(-a2x+a2y) :

式中:n为数据切片长度;axi、ayi分别为第i点x、y方向的加速度.
在横向、纵向加速度修正过程中,对ax与ay两个检测信号的协方差E(axay) 以及方差之差E(-a2x+a2y)的估计是最为关键.事实上对于一段长时间的检测数据而言,取其中不同部分的检测结果所估算得到的偏差角 θ 是存在差异的,这是因为加速度检测数据ax与ay本身存在一定随机性,并且线路的曲线、牵引与制动是存在一定的不确定性,因而为了较为精确地估计偏差角 θ ,需要从统计角度来考虑,本文提出一种基于极大似然法偏差角估计方法.
通过统计方法估计偏差角,需要将整段检测数据分割为多个数据片段,分别计算每个数据片段的偏差角,求出整段数据的偏差角分布,再根据极大似然原理确定偏差角的可能区间,求区间数据均值得出最终的偏差角估计值.
具体实现,设时间窗长为l,间隔步长为 dt,对于测量总时间T,采样频率为Fs,则数据片段数N以及单个数据片段长n有如下关系:

根据偏差角估计式计算得到第k个区段的角度估算值 θk.考虑到偏差角范围 [-45°, 45°],在进行频次统计时,以步长 Δθ = 1° 将该范围分为90个区间,进而统计每个区间j(j=1,2,···,90) 的出现频次.选择频次最高的区间为角度偏差的极大似然区间,设 θ 为该区间的中心角.该优化过程可以记为

式中:P(·) 为概率函数.
最后,以 θˆ 为中心,取 ± 3°范围内的所有估计值(取 3°作为范围拓展是考虑了实测数据一般有大约 6°的范围较为集中),并求平均得到最终的偏差估计值 θ*,如式(18).

式中:m为满足的偏差点数目.
因此,智能手机姿态修正方法可以总述为

2 车辆运行品质评价方法
车辆振动响应是车辆子系统与轨道子系统通过轮轨接触相互作用的结果.为保障车辆乘坐舒适性,轨道局部不平顺引起的车体瞬时垂向加速度半峰值不大于0.15g,横向加速度半峰值不大于0.09g.因此,可基于智能手机检测数据评价车辆乘坐舒适性,依据车体瞬时振动阈值识别局部轨道不平顺[15].
当前轨道交通领域广泛应用的车辆运行品质评价指标包括ISO-2631计权加速度、Sperling平稳性、UIC513舒适性[16],我国《高速试验列车动力车强度及动力学性能规范》[17]中建议适用UIC513舒适性指标评估车辆乘坐舒适性,该指标综合考虑了车体三向振动的共同作用,采用乘客站姿或坐姿均适用的简化方法,如式(20).

式中:IRCI为舒适度指标;a为车体加速度,其上标Wd、Wb分别为水平和垂向频率计权因数(如图6所示),下标P95为车体加速度的95%分位值.

图6 W d、Wb 频率计权曲线Fig.6 W d and W b frequency weighting curve
UIC513乘坐舒适度划分等级如表1所示.
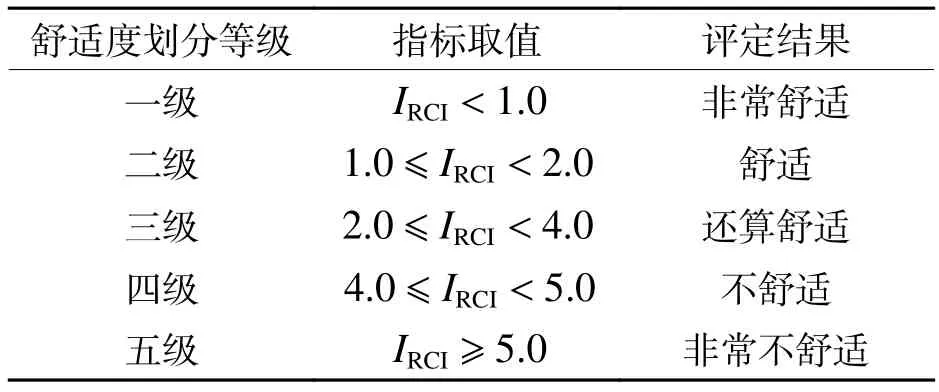
表1 UIC513舒适度等级划分Tab.1 UIC513 comfort level classification
3 智能手机姿态误差矫正算法试验验证
为验证手机姿态修正算法的正确性,选择2部同型号手机进行现场测试,测试过程中,两部手机间放置夹角近似30°,如图7所示.测试路线为国内地铁某条线12个车站,11个站区间.
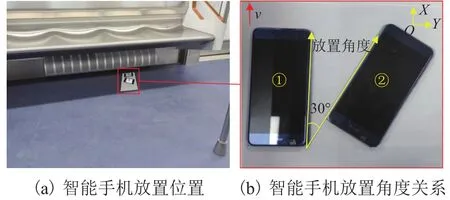
图7 现场测试Fig.7 Field tests
3.1 垂向姿态误差矫正
该类误差是由于手机坐标系z轴与车体坐标系Z轴(重力方向)不平行导致,直观表象是手机检测的x与y方向加速度数据均值不等于0,也即出现固定偏差.由手机加速度传感器特性可知,手机平面坐标系和车体平面坐标系正向夹角范围[-45°,45°],当手机放置角度超出该范围时,手机平面坐标系和车体平面坐标系方向相反,其检测数据如图8所示.

图8 原始检测数据Fig.8 Raw data
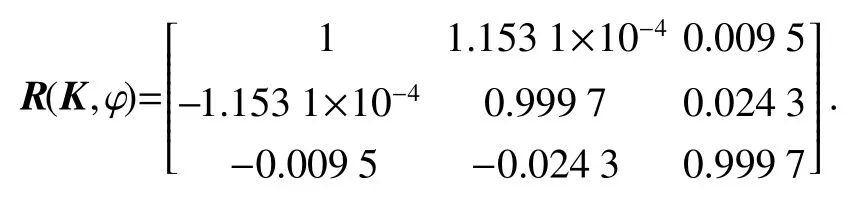
只需提取车辆进站停靠时的手机检测数据,进行手机垂向加速度姿态修正,如图9所示.以手机1为例,根据3个方向偏差值计算旋转角 φ 、旋转轴u和旋转轴对应矩阵K:

图9 原始静止数据Fig.9 Raw static data

进而将 φ 值与K代入罗德里格旋转公式,可得变换矩阵如下:
智能手机垂向姿态矫正后如图10所示.
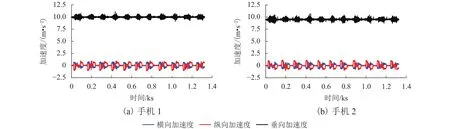
图10 垂向姿态修正Fig.10 Vertical coordinate alignment
3.2 水平向姿态误差矫正
取时间窗长度10 s,间隔步长1 s,对于测量总时间1 300 s,采样频率为100 Hz,可知数据片段数N=1290,单个数据片段长n=1000.对于第k个加速度样本,计算其协方差与方差ˆ(x2-y2) ,进而根据偏差角估算公式得到偏差角估计值 θk.所有的 θk在时间上的分布如图11所示,对 θk在[-45,45]范围内做频次统计,得到频次分布直方图.
图11(a)② 和图11(b)② 中:蓝色点为所有偏差估计值;红色点为极大似然估计值在 [-3,+ 3]内所有点的分布.所有的偏差角估计值有一定的离散性,在 ± 3 0°附近分布较为集中.图11(a)③ 和图11(b)③ 频次分布直方图也呈现出局部较为集中的现象,尽管在区间 [45°,45°]均有分布,但更为集中于 ± 30°附近,取 [±27°,±33°]为极大似然角估计区间,得到最终的偏差角估计值=29.75°和=30.50°.通过平面旋转公式可实现数据的矫正:

图11 偏差角的极大似然估计Fig.11 Maximum likelihood estimation of deviation angle


经过垂向及水平面两次姿态矫正后,借用极大似然原理,可知手机1和手机2姿态修正角度,如表2所示.

表2 手机姿态修正角度Tab.2 Smartphone cooridinate alignment angle
由手机水平面姿态修正角可知:

姿态矫正后,计算得到的手机1和手机2夹角为 29.750°,与预先手机放置角度 30° 近似相等.以智能手机1检测数据为例,图12为车体横向、纵向加速度矫正前后对比.

图12 车体横向、纵向加速度矫正前、后对比Fig.12 Lateral and longitudinal accelerations before and after coordinate alignment
4 手机传感器精度验证
智能手机坐标系经姿态矫正后,可保证智能手机坐标系与车体坐标系平行一致,而此时的智能手机检测数据是否可以真实反映车体振动,需进一步经现场试验验证智能手机传感器精度,采取智能手机与高精度传感器现场测试对比试验.现场安装测试如图13所示,测试仪器重要参数如表3所示.

表3 智能手机与高精度传感器重要参数Tab.3 Main parameters of smartphone and high-precision sensor

图13 手机传感器精度验证试验Fig.13 Accuracy verification tests of smartphone and sensor
智能手机坐标系经姿态矫正后,提取某测试区间的智能手机与高精度传感器检测数据对比如图14所示,可知智能手机与精密传感器检测数据幅值大小偏差较小.经有效均方根值(RMS)和功率谱密度(PSD)进一步分析智能手机传感器测试精度,如图15、16所示.

图14 智能手机与高精度传感器测试数据Fig.14 Detection data of smartphone and high-precision sensor
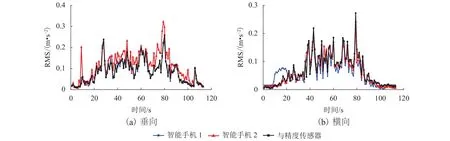
图15 智能手机与高精度传感器检测数据有效均方根值Fig.15 Root mean square of detection data from smartphone and high-precision sensor
为保证智能手机添乘检测车体振动状态的便捷性,测试过程中,智能手机直接放置在车厢地板表面,从图15可知:1 s移动窗下智能手机和高精度传感器检测数据RMS值大小基本一致,智能手机2垂向加速度RMS值仅在10 s位置与高精度传感器存在明显偏差,而智能手机1横向加速度RMS值在9 ~20 s范围内存在明显偏差,对应的95%分位误差值为0.017 m/s2.由此可知,当车体发生剧烈振动时,智能手机垂向或横向加速度存在局部波动.
智能手机和高精度传感器垂向、横向加速度功率谱密度如图16所示,智能手机1、2垂向加速度功率谱密度在3.0 ~ 9.0 Hz大于高精度传感器,在0.5 ~3.0 Hz智能手机与高精度传感器功率谱密度大小一致,且车体垂向振动频率主要集中在该频带范围内,体现出图14时域信号幅值大小偏差较小;智能手机与高精度传感器横向加速度功率谱密度在0.5 ~13.5 Hz幅值大小一致,智能手机可真实采集车体横向振动主频.经测试分析可知,智能手机传感器精度满足现场添乘需求,可作为一种新型、便捷的智能终端应用于城市轨道交通领域.

图16 智能手机与高精度传感器检测数据功率谱密度Fig.16 Power spectral density of detection data from smartphone and high-precision sensor
经研究可知:智能手机检测数据可有效反映车体振动响应真实值,实现地铁车辆运营过程中车辆运行品质和局部轨道平顺性的检测.由 图14可知:该区间垂向加速度半峰值约为1.000 m/s2(小于规范半峰值0.150g),横向加速度半峰值约为0.500 m/s2(小于规范半峰值0.090g),表明该区间未出现影响车辆运行品质的局部轨道不平顺;融合智能手机三向加速度数据综合评估该区间UIC513舒适性指标,如图17所示,变化趋势与车辆运行速度变化规律基本一致(先增大,后平稳,再减小),舒适性指标最大值为0.8 m/s2(小于1.0 m/s2,由表1可知,该区间运行品质为一级,乘客乘坐非常舒适.

图17 某地铁区间UIC513舒适性指标Fig.17 UIC513 comfort index of metro section
5 结 论
本文介绍了一种基于智能手机检测车辆运行品质的方法,并就车体坐标系与智能手机坐标系偏差问题进行了深入分析,提出了手机姿态误差的系统性矫正方法.该方法在不借助外部信息的情况下,仅从加速度数据本身的特性出发,一方面以重力方向为参照修正了垂向加速度的偏差,另一方面通过横向、纵向加速度的正交性,对手机、车体坐标系平面偏差进行矫正,修正过程中采用极大似然原理,保证角度偏差估计的可靠性.
最后,结合现场试验,验证了智能手机姿态误差矫正算法和传感器精度的准确性.修正垂向角度偏差后,横向、纵向加速度偏差在0.030 m/s2以内,手机1和手机2水平向夹角约29.75°,与试验手机放置角度30°近似相等.同时,智能手机与高精度传感器的实测对比试验表明,智能手机传感器精度满足地铁运营添乘需求.
