混合动力系统VVT响应性故障在线诊断策略开发
2022-08-25王沛王字满张冬生刘少飞
王沛,王字满,张冬生,刘少飞
(1.北汽福田汽车股份有限公司,北京 102206;2.北京理工大学机械与车辆学院,北京 100081)
可变气门正时系统在实现米勒循环、内部EGR等方面具有显著优势,目前已成为发动机节能减排所必不可少的一项基础技术,这同时也意味着当该执行机构出现故障时,将对排放性能恶化带来重要影响。
《轻型汽车污染物排放限值及测量方法(中国第六阶段)》(以下简称国六法规)J.4.12.1要求,如果车辆使用了VVT系统,OBD系统应监测控制目标错误和响应迟缓故障。当前主流的诊断策略要求VVT从参考位置运行至较大开度位置,并在此期间实时监控目标VVT角度与实际VVT角度偏差以确认其响应性故障表现。《节能与新能源汽车技术路线图2.0》已明确指出混合动力技术是未来发展方向之一,各大整车企业已开始布局混动技术作为中长期方案。由于混动发动机主要运行在燃油经济性区域且工况稳定,VVT的动作范围与变化波动程度均小于纯发动机驱动形式,此时传统的诊断策略可能会出现诊断完成困难以及极端状态下的误诊断现象。
综上所述,为适应混动发动机诊断需求,需要对VVT诊断策略进行优化,使之在不需要强实时性与大动作范围诊断条件的同时,依然能够在法规循环中实现故障模式判断。
1 VVT诊断功能基础
1.1 VVT工作原理
VVT系统主要由可变相位器(CVCP)以及机油控制阀(OCV)构成,ECU通过控制CVCP两侧腔室机油压力变化,从而使得转子(与凸轮轴相连)相对于正时链轮发生相对旋转,实现相位调节的目的,其中CVCP两侧机油压力变化通过控制OCV来实现,而OCV的位置调节则受控于目标与实际VVT位置的偏差。图1示出VVT系统控制过程。

图1 VVT系统控制过程
正常情况下,ECU根据各传感器信号和发动机工况,计算当前最优目标VVT位置,并向OCV发出控制指令,完成凸轮相位调节,期间ECU通过曲轴与凸轮轴传感器信号获得实际VVT位置,并计算目标与实际位置偏差实现闭环控制。当VVT系统发生故障时,发动机将无法运行在最佳进气充量与配气相位工况,由此带来排放与经济性能恶化;同时VVT实际位置长时间无法响应目标位置,导致执行机构负载过高,严重时将造成VVT驱动级系统损坏。因此无论是考虑排放角度还是出于零部件保护目的,都有必要对VVT系统故障状态进行诊断。
1.2 VVT诊断基础
VVT响应性故障包括卡滞性故障与慢响应故障两种类型,其中卡滞性故障表示实际VVT卡滞在某个角度位置并与目标位置存在较大的差距,慢响应故障虽然也表现为实际与目标位置的偏差,但其实际位置是可以向目标位置移动的,只是所需时间更长。
当前VVT响应性故障诊断策略主要基于目标与实际VVT实时位置偏差:当VVT响应存在严重问题时,二者动作偏差值会大于疑似故障阈值err_thr,此时系统进入疑似故障判定过程,并记录当前实际VVT位置err_act,同时等待一定时间err_t;如果等待期内偏差值始终大于err_thr,当延时结束后,系统会比较此时实际VVT位置err_act与位置err_act偏差绝对值err_d,若err_d大于响应性故障诊断阈值,则诊断为VVT慢响应故障,否则认为此时VVT出现卡滞性故障。这一故障诊断过程如图2所示。
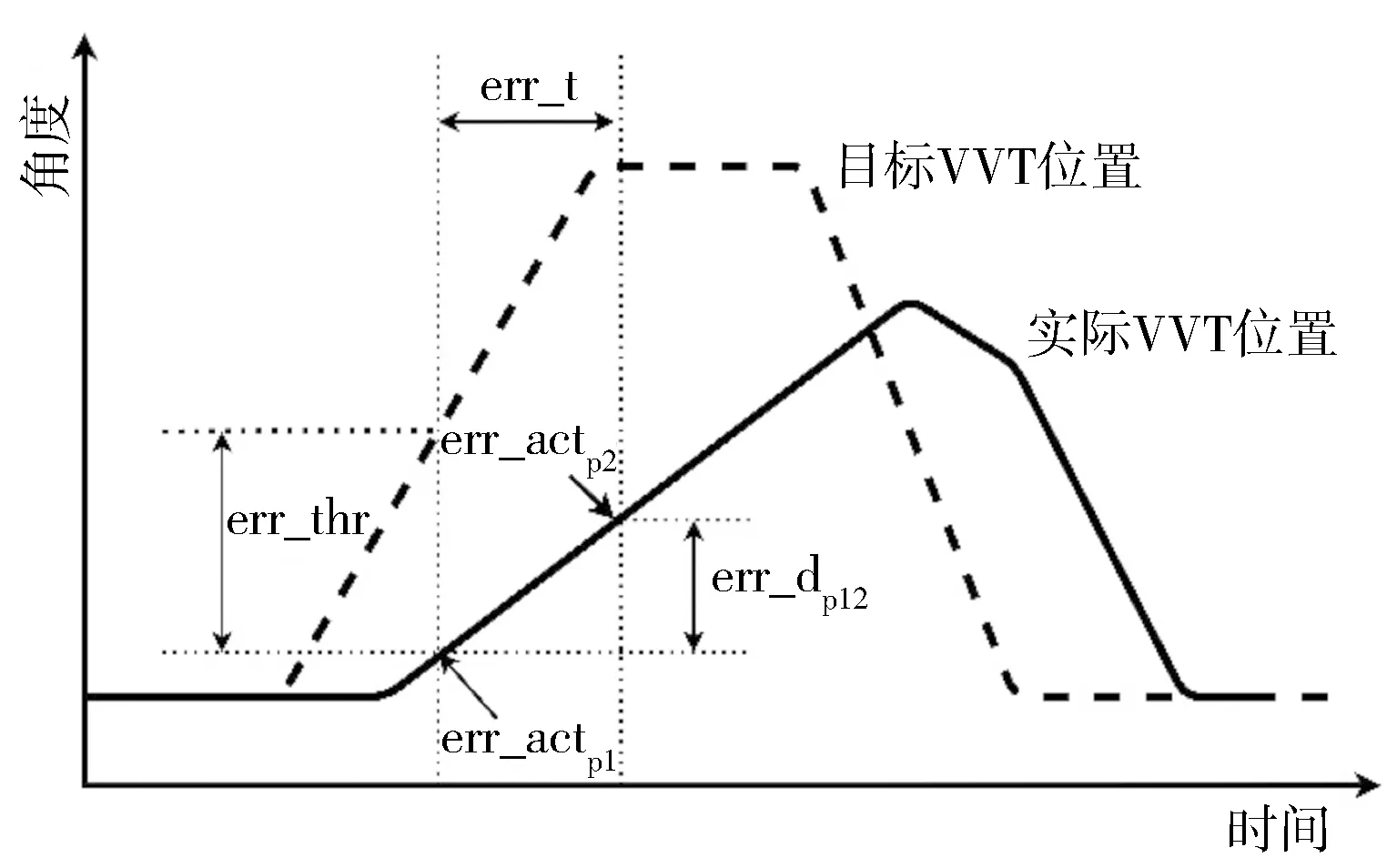
图2 VVT响应性故障诊断过程(当前策略)
2 诊断功能策略开发
2.1 诊断算法设计
当前的VVT诊断策略主要针对传统发动机驱动结构,诊断对象为VVT目标与实际角度的实时位置偏差,诊断阈值设置为基于此位置偏差的绝对角度值。在面对混合动力工况时,VVT的动作范围与变化程度均小于纯发动机驱动工况,由此带来了两方面问题:1)VVT动作范围变窄导致阈值设置区间缩短,卡滞与慢响应故障状态区分度不足;2)变化程度的降低使得疑似故障状态确认次数减小,导致诊断无法完成。
为解决上述问题,设计了一种针对混动系统的VVT诊断策略:1)以固定计算周期内目标与实际VVT动作角度的偏差累计值替代VVT动作范围;2)以固定的统计窗口输出疑似诊断结果,取代基于VVT动作变化程度的故障事件确认方式。
统计窗口为一个固定时间窗口,在驾驶循环开始后进行计时,同时一个统计窗口包含有固定的个计算周期。对于第个统计窗口T_window_内第个计算周期cycle_,动作角度偏差计算过程如图3所示。

图3 动作角度偏差计算
假设计算周期cycle_起始1时刻VVT所在位置为Ang_cycle__1,在计算周期结束后的2时刻运动至位置Ang_cycle__2,则该计算周期内动作角度变化值表达为
delta_cycle_=Ang_cycle__1-Ang_cycle__2。
(1)
式中:delta_cycle_为第个统计窗口内第个计算周期VVT目标(实际)动作角度变化值,单位为(°)。对于统计窗口T_window_内包含的个计算周期,其动作角度变化值分别为delta_cycle_1,delta_cycle_2,…delta_cycle_,则该统计窗口的VVT动作角度累计值表达为

(2)
式中:delta_window_为第个统计窗口VVT动作角度变化累计值,单位为(°)。在相同计算周期与统计窗口内分别计算目标VVT偏差累计值delta_window_(target)与实际VVT偏差累计值delta_window_(actual),对应的偏差累计值比例ratio_delta_window_为

(3)
式中,依据VVT状态表现与故障程度的不同,ratio_delta_window的具体表现特征如表1所示。

表1 VVT不同响应性状态特征表现
表1中,A%为卡滞故障诊断阈值,当位置偏差比例系数ratio_delta_window≤A%时系统判断当前统计窗口为卡滞故障状态;B%为慢响应边界诊断阈值,当ratio_delta_window处于(A%,B%)范围时系统判定为慢响应故障状态;而ratio_delta_window≥B%的状态为无故障状态,同时随着ratio_delta_window的增加,VVT响应性表现更好。A%与B%的确定需要通过实车试验标定与相关统计学分析完成。
同时在诊断适用性方面,当前诊断策略需要目标VVT能够达到较大动作范围以保证足够的等待延时,但在混合动力工况下由于VVT动作范围缩小,将会导致等待时间缩短,这对于响应性较差的VVT(如初始油压建立较慢)便会带来误判故障风险;而对于偏差累计诊断算法,虽然VVT动作初始过程响应性较差,但只要在统计窗口内位置偏差比例系数不小于B%,便不会误判为慢响应故障,因此不再需要VVT具有较强的响应性,其适用性范围也更加广泛。
2.2 策略逻辑架构
VVT响应性故障诊断功能通过软件应用层模块实现,按照2.1节算法设计内容与诊断数据流逻辑分为诊断条件使能、统计窗口计算、故障状态判断、故障模式确认与诊断结果输出五项子功能模块。以进气侧VVT诊断为例进行策略逻辑架构说明(见图4),逻辑关系示意以True表示逻辑“真”,False表示逻辑“假”,“==”表示数据判断,“=”表示数据赋值;虚线为状态路径,传递逻辑状态数据,当其表征的状态为True时,虚线目标位置内的功能才会执行;实线为数据路径,传递物理数据。

图4 VVT诊断策略逻辑架构
2.2.1 诊断条件使能
诊断使能条件定义了车辆处于何种状态时激活诊断功能,包括环境温度及压力、发动机水温、机油温度,以及VVT控制激活等条件,当这些信号条件满足设定范围后,诊断使能标志位写为“True”,诊断功能随之激活。
2.2.2 统计窗口计算
该子模块的数据输入为目标、实际VVT动作位置,主要进行计算周期内VVT动作偏差的计算,并在一个统计窗口内完成多个计算周期动作偏差绝对值累计。以目标VVT为例,其相应的逻辑功能如图5所示。

图5 VVT诊断统计窗口计算子模块逻辑功能
计算过程为系统每100 ms完成一次实际VVT位置采样,统计窗口开始时相应标志位置位并激活计算周期子模块。每开始一个新的计算周期,系统会记录当前时刻目标、实际VVT位置;当达到计算周期时间时,触发计算当前时刻目标、实际VVT位置与计算周期起始时刻位置偏差,取绝对值后与对应偏差积分器循环相加,并在达到统计窗口时间后向故障状态判断模块输出积分计算值并重置偏差积分器。
2.2.3 故障状态判断
该子模块通过计算统计窗口内的目标、实际VVT动作偏差比例结合阈值实现故障状态判断,并将当前的故障诊断状态传递至故障模式确认子模块。图6示出了相应的逻辑功能。

图6 VVT诊断故障状态判断子模块逻辑功能
图6中,B_sigerr,B_slowerr和B_noerr分别为VVT卡滞、慢响应以及无故障状态标志位,当统计窗口结束时计算实际VVT与目标VVT偏差值比例,并进行故障状态判断;当不满足卡滞故障阈值条件时,继续进行慢响应故障判断;如果不满足慢响应故障阈值条件,则判定为该统计窗口内VVT无故障。
2.2.4 故障模式确认
故障状态判断针对当前统计窗口,为“疑似状态”事件判定,而“疑似状态”的确认需要经过一定次数的事件重复,只有当重复次数达到设定阈值后,才会最终确认该状态。图7示出了相应的故障模式确认逻辑功能。

图7 VVT诊断故障模式确认子模块逻辑功能
如图7所示,sigerr_cnt,slowerr_cnt和noerr_cnt分别为卡滞、慢响应以及无故障状态计数器,诊断功能将此三项状态计数器定义为互斥关系,即一项事件发生后对应计数器增加而另外两项计数器减小。设置状态确认阈值为5,同时限定状态计数器增长最大值为9,最小值为0。
3 诊断功能试验验证
诊断功能验证在一款搭载1.5T GDI发动机的插电式混合动力车(pPlug-in Hybrid Electric Vehicle,PHEV)上进行,发动机配置有进/排气VVT。试验验证以进气VVT诊断为例,对其无故障、卡滞以及慢响应三种状态的诊断情况进行分析说明。软件策略中将统计窗口标定时间设置为100 s,计算周期标定时间设置为1 s。
3.1 无故障状态诊断
VVT无故障状态表现为实际VVT跟随性良好,统计窗口时间内偏差累计值比例在1附近,并且整个诊断过程中不存在卡滞及慢响应故障计数器发生增长的情况。无故障状态诊断主要验证诊断算法的基础功能实现情况,图8示出WLTC循环下VVT响应性良好状态下相应的诊断情况。
如图8所示,无故障状态WLTC循环中VVT响应性良好状态下,在第900 s无故障计数器增长至5,并在第1 300 s达到计数器最大值。整个WLTC循环共进行了16次统计窗口计算,其中第3、第4次统计窗口目标VVT偏差累计值过小而不进行计数器统计计算。在14次有效统计窗口计算中,VVT偏差累计值比例均在95%以上,其中平均值为101%,标准差为0.034。诊断过程中无故障状态计数器正确增加,同时两项故障状态计数器(卡滞&慢响应)并未出现误诊断增长情况。
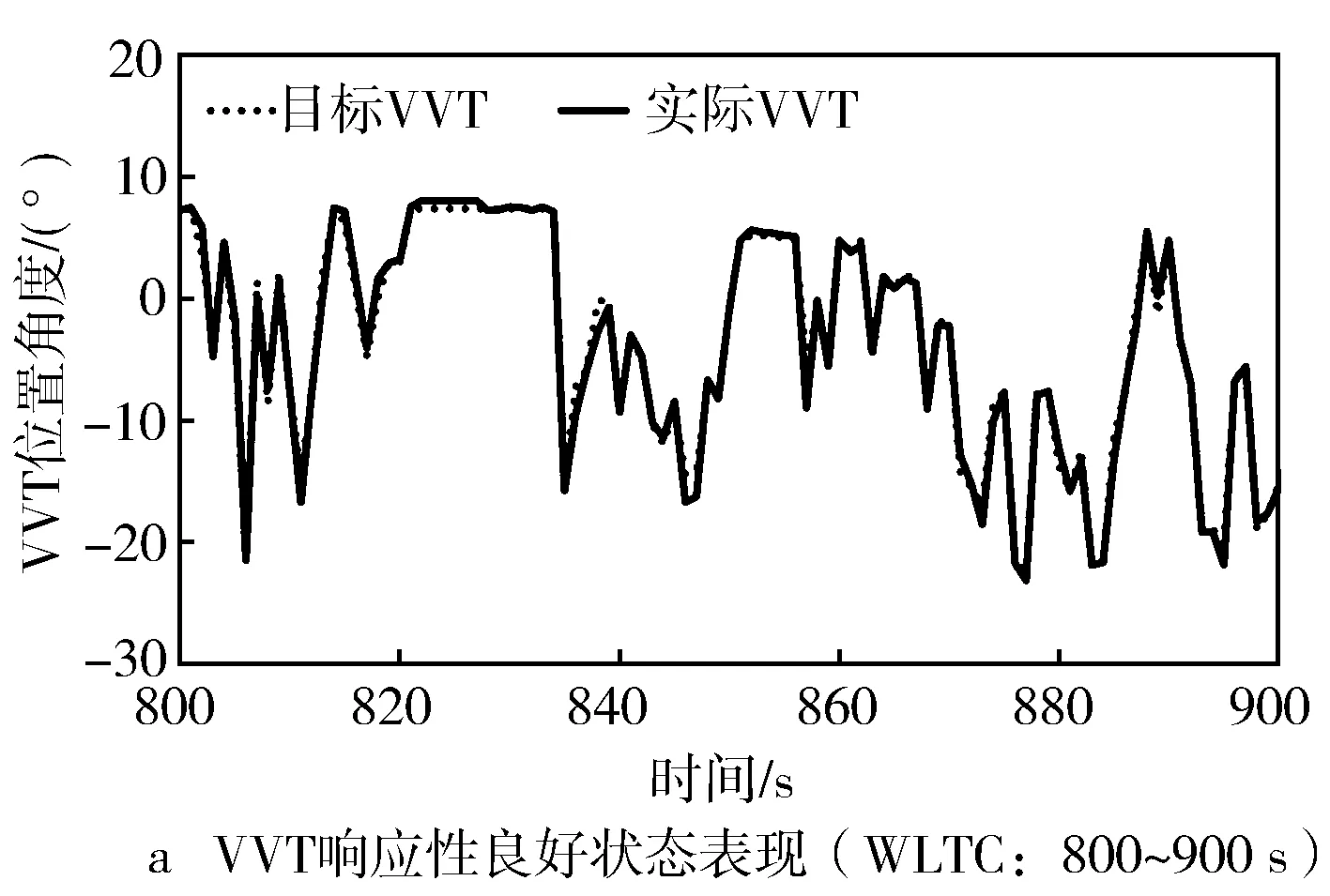

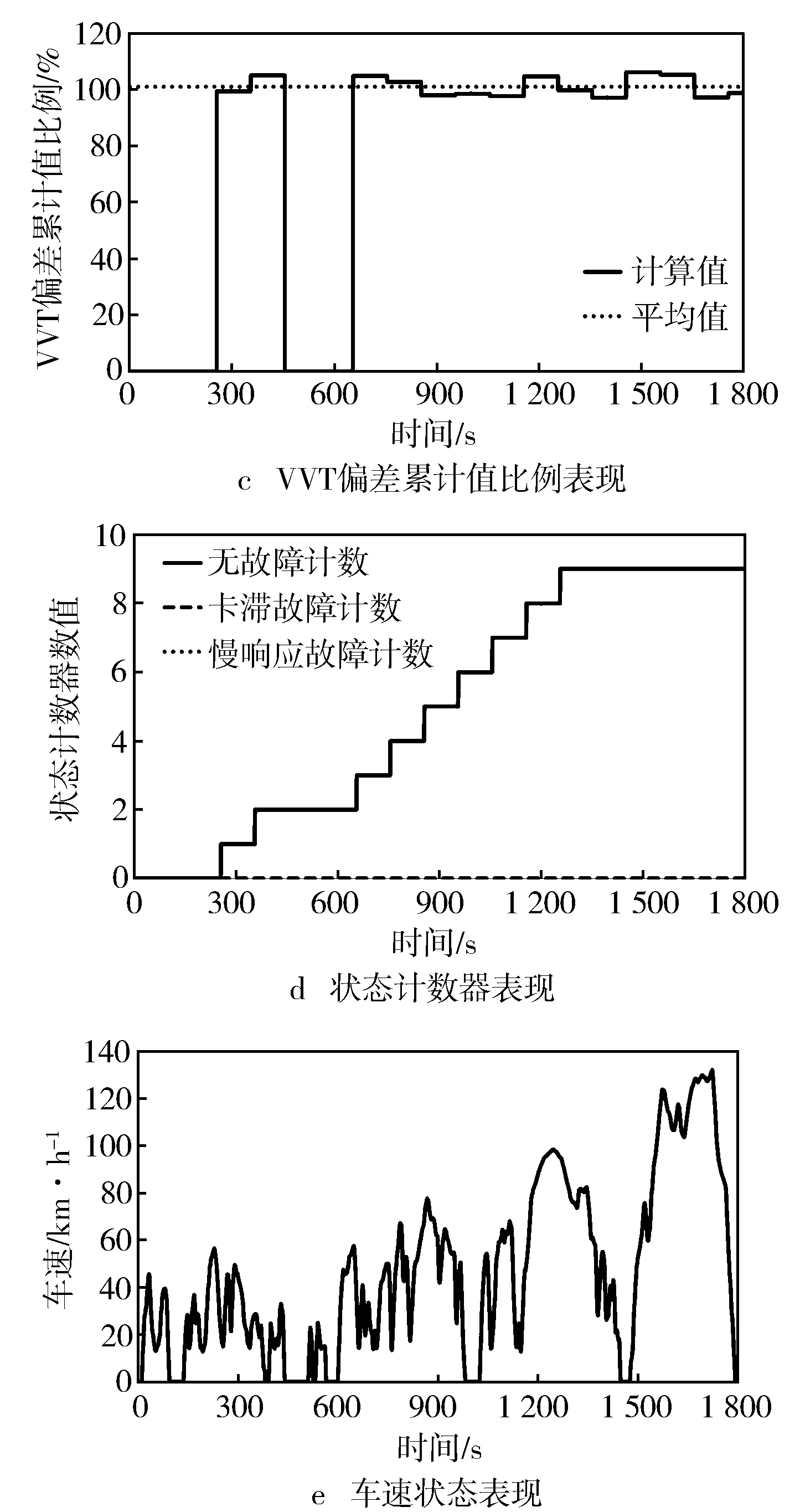
图8 WLTC循环VVT响应性诊断验证(良好状态)
3.2 卡滞故障诊断
VVT卡滞故障表现为实际VVT执行机构卡滞在某一位置而无法响应目标位置请求,试验过程分为实际城市道路功能验证与排放循环阈值验证两部分,其中道路功能验证主要验证诊断功能的故障确认以及故障修复过程。图9示出VVT卡滞故障诊断实际城市道路验证过程。


图9 VVT卡滞故障实际城市道路功能验证
如图9所示,为验证故障报出与修复功能,试验过程将统计窗口时间设定为15 s,试验结果显示,VVT无故障状态下第110 s无故障计数器到达5次,完成无故障诊断;卡滞故障植入为第200 s,此后无故障计数器从6次逐渐减少,同时卡滞故障计数器逐渐增加,在第290 s完成5次故障状态确认,报出VVT卡滞故障;第305 s移除卡滞故障状态,卡滞故障计数器自350 s开始降低同时无故障计数器增加,在第410 s无故障计数器达到5次(此时卡滞故障计数器降低至0次)完成故障修复,最终在第470 s达到最大计数。
VVT卡滞状态故障阈值设定通过WLTC循环来评估,植入VVT卡滞故障程度为-10°,试验及诊断情况如图10所示。
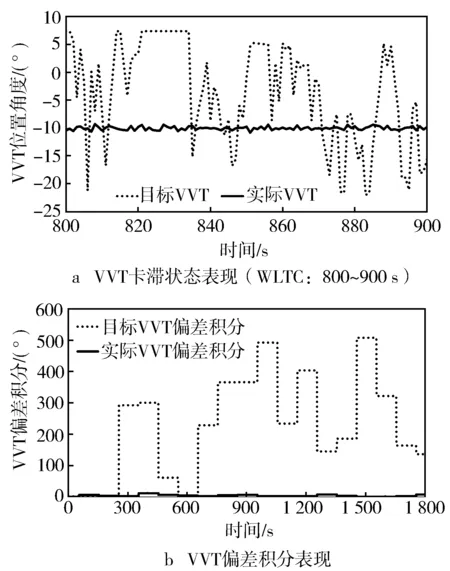

图10 WLTC循环VVT响应性诊断验证(卡滞状态)
如图10所示,在16次统计窗口计算中,第3、第4次统计窗口目标VVT偏差累计值过小而不进行计数器统计计算。14次有效统计窗口VVT偏差累计值比例平均值为1.8%,最大值为5.1%,基于这一计算结果设置卡滞阈值为8%,同时整个试验过程慢响应故障计数器未出现增长情况。
3.3 慢响应故障诊断
VVT慢响应故障表现为实际VVT执行机构在响应目标VVT位置请求时出现一定时间的延迟,因此试验主要基于WLTC循环进行功能验证与阈值标定。设定慢响应故障植入程度为10 s。
如图11所示,在11次有效统计窗口计算中,第1 100 s慢响应故障计数器为5次,完成故障模式确认,并在第1 600 s达到最大计数。所有有效统计窗口计算偏差累计值比例分布在10%~25%,大于卡滞故障判定阈值8%,不会出现误判卡滞故障的情况。


图11 WLTC循环VVT响应性诊断验证(慢响应状态)
慢响应故障诊断阈值上限的确定取决于所能接受的响应延迟极限,虽然在这种状态下由于其结构原因导致跟随性出现一定延迟,但并不会对车辆性能带来明显影响,因此诊断过程不期望将这种状态判定为慢响应。设定响应延迟极限状态为2 s。
如图12所示,诊断过程共进行了14次有效窗口计算,其中偏差累计值比例平均值为81.5%,标准差为0.08。由于慢响应诊断阈值上限的设置将影响无故障的诊断结果,因此将这一极限情况设为无故障状态,而VVT 10s慢响应则定义为故障状态,采用统计学分析,使慢响应故障诊断阈值设定符合±3标准。


图12 WLTC循环VVT响应性诊断验证(响应极限状态)
如图13所示,VVT慢响应故障状态+3边界为26.6%,2 s响应极限状态-3边界为57.5%,考虑到存在2~10 s之间的慢响应情形,设置慢响应故障阈值为50%,相应的诊断有效概率大于99.995%,这意味着当VVT执行机构为正常响应状态时不会出现误判故障的风险。

图13 VVT响应延迟状态统计学分析
4 结束语
混合动力发动机由于VVT动作范围的缩短,使得原有的基于VVT实时位置监控的诊断策略不再适用,故采用偏差累计值诊断策略,故障诊断过程不再需要VVT大范围动作,诊断过程更加适用于混合动力工况,对于执行机构响应性不足,但不影响发动机性能的情形具备良好的诊断裕度。
试验结果表明,实际城市道路试验下VVT卡滞故障报出与修复功能正常执行;WLTC循环VVT卡滞故障状态比例系数最大值为5.1%,故障判定阈值为8%,不会出现慢响应计数器增长情况;响应性良好状态VVT偏差比例系数平均值为101%,标准偏差为0.034,诊断结果准确且计算稳定。
VVT慢响应故障诊断过程未出现误诊断为卡滞以及误修复情况,2 s响应性延迟极限条件下VVT偏差比例系数平均值为81.5%,采用统计学分析得到慢响应阈值为50%,符合±3诊断标准,相应的诊断有效概率大于99.995%,对于VVT正常响应状态不会出现误判故障的风险。
