快速捕获飞行器惯组棱镜初始方位的地面瞄准系统
2022-08-25高明杰李发动宋小艳狄世超
高明杰,李发动,宋小艳,狄世超,王 超
(北京航天发射技术研究所,北京,100076)
0 引 言
目前基于运载火箭箭上棱镜的瞄准工作,主要分为1 次粗瞄和3 次精瞄。粗瞄一般在箭体吊装后进行,采用方位转动发射台并主动调整瞄准设备来实现;第1次精瞄一般在箭体负载(卫星或飞行器等)安装完成后进行,同样采用方位转动发射台并主动调整瞄准设备来实现;第2 次精瞄一般在箭体加注后进行,第3次精瞄在临近发射前进行,后两次精瞄主要通过主动调整瞄准设备来实现,发射台不再转动或者以有限小范围内转动发射台为辅。
本文提出的地面瞄准系统,用于快速捕获飞行器捷联惯组棱镜初始方位,该飞行器采用运载火箭作为载体,飞行前的地面瞄准工作分为两部分:基于运载火箭惯组棱镜的瞄准及基于飞行器惯组棱镜的瞄准。并且要求先展开箭体瞄准,后展开飞行器瞄准工作。
1 需求分析
由于先展开箭体瞄准,后展开飞行器瞄准工作,且箭体瞄准会根据情况依托方位转动发射台来实现。因此不仅箭体随风摆的运动及日照、加注等造成的变形,将1∶1 传递给飞行器惯组棱镜,造成惯组棱镜方位角变化,同时先行展开的箭体瞄准若方位转动了发射台,也将带来飞行器惯组棱镜方位角度的变化。对飞行器瞄准系统,具有如下需求:
a)棱镜初始方位捕捉范围大,为同类基于运载火箭惯组棱镜瞄准范围的5 倍左右;b)飞行器每次瞄准工作不可转动发射台,完全需要瞄准设备在较大范围内进行主动搜索捕获目标棱镜;c)在保证高精度高可靠的前提下,提出了快速性的要求,若方位变化较大,超出瞄准敏区或横向平移装置的范围,需要重新快速调整瞄准设备捕获飞行器棱镜,使瞄准仪与飞行器棱镜准直。
2 系统总体方案
针对飞行器惯组棱镜地面瞄准的新特点,设计瞄准标尺上与瞄准平移装置相适应的系列瞄准点,实现瞄准设备对箭体变形的快速定位,提高对惯组棱镜横向捕获及跟踪的适应性、快速性及准确性;采用快速捕捉飞行器棱镜初始方位的方法,解决在棱镜初始方位偏差覆盖的区域内选择合适的瞄准点的问题,提高地面瞄准的快速性、准确性、安全性及可靠性;采用扩大瞄准测角敏区的扩束装置,解决风晃环境下对瞄准仪有大工作敏区需求的问题,提高风晃环境下捕获返回光束的快速性,缩短了瞄准时间;采用瞄准控制器,实现瞄准数据自动采集、解算及数据上传,提高了瞄准数据采集解算传递的准确性及快速性。
3 技术的实现途径
3.1 适应大范围瞄准的瞄准点设置
发射场配置如图1 所示。1#、2#、3#为运载器瞄准所用的发射点、瞄准点、基准点;4#为飞行器的瞄准点,4#的瞄准点是指在瞄准基线上每隔300 mm 建一个瞄准点共建31 个瞄准点的总称,瞄准点号为A-15,…,A-1,A0,A+1,…,A+15;5#为飞行器的基准点,建在飞行器惯组棱镜理论法线上,4#的瞄准点A0 建在发射点与5#基准点的连线方向上,瞄准基线垂直于发射点与瞄准点A0 的连线,瞄准基线上瞄准点A0 左右两侧各建15 个瞄准点。
图1 瞄准点配置Fig.1 Aiming Point Configuration Diagram
该瞄准标尺覆盖惯组棱镜方位范围为±104′,每两个瞄准点之间间隔为300 mm,瞄准设备中高精度横向平移装置有效平移量为400 mm,瞄准标尺上的瞄准点与瞄准平移装置相匹配。
具体指标如下:
a)4#、1#水平距离为(140±2) m;
b)4#瞄准点中A0 与5#水平距离不小于75 m;
c)4#各点至5#基准点连线的方位角大地测量误差不大于4″(2.7σ)。
3.2 捕获棱镜初始方位的地面瞄准方法
a)加注前粗瞄。
对火箭惯组棱镜的粗瞄完成后,对飞行器惯组棱镜粗瞄,此时发射台不可再回转。具体流程如下:
1)在发射场的活动瞄准间理论位置处,利用激光粗瞄器向惯组棱镜发出一束粗瞄光束,根据惯组棱镜返回光束位置确定活动瞄准间的位置,并进一步确定平移装置架设的中心位置。
2)确定激光光电瞄准仪平移装置的架设点后,在平移装置上架设激光光电瞄准仪,激光光电瞄准仪与瞄准基线上的瞄准点精确对心后,记录瞄准点点号并目视瞄准标杆仪,方位角清零,将基准线A的大地方位信息Φ传递到瞄准设备上,瞄准控制器根据瞄准点点号选取基准线A的大地方位信息Φ。当需要在瞄准基线上移动瞄准仪平移装置的架设位置时,需重新确定瞄准点,记录点号并与标杆仪进行目视光学准直,方位角清零,瞄准控制器重新根据瞄准点点号选取基准线A的大地方位信息Φ。
3)激光光电瞄准仪与基准标杆仪准直后,将方位角清零,转动瞄准仪方位,并装订适当的俯仰角,使其望远镜照准惯组棱镜,目视观察返回激光的位置并判断光点摆动中心,通过平行移动平移装置和方位微动瞄准仪,使得返回激光能够进入瞄准仪视场内,进而使得返回的激光光点与目镜十字丝重合,实现与惯组棱镜的准直。获取准直时激光光电瞄准仪的方位角度和瞄准仪仰角,并将其贮存到瞄准控制器上。
b)加注后粗瞄。
在火箭加注后的箭体精瞄后进行,此时视惯组棱镜方位角与加注前相比的变化选择以下操作:
1)方位变化小于3′,目视观察返回激光的位置并根据目视判断光点在激光瞄准仪目视视场内的摆动情况,通过平行移动平移装置和方位微动瞄准仪,使激光光电瞄准仪与捷联惯组棱镜准直。
2)若方位变化超出±3′,不超出±18′,搬动平移装置,在瞄准基线上重新选择平移装置架设的中心位置。架设激光光电瞄准仪,重新获取基准方位;激光光电瞄准仪获取基准方位后,方位角清零,转动瞄准仪方位,并装订适当的俯仰角,使其望远镜照准惯组棱镜,目视观察返回激光的位置并根据目视判断光点在激光瞄准仪目视视场内的摆动情况,通过平行移动平移装置和方位微动瞄准仪,使激光光电瞄准仪与捷联惯组棱镜准直。
3)若方位变化超出±18′,则重新确定活动瞄准间的位置。瞄准间位置确定、平移装置架设后,激光光电瞄准仪重新获取基准方位,激光光电瞄准仪获取基准方位后,方位角清零,转动瞄准仪方位,并装订适当的俯仰角,使其望远镜照准惯组棱镜,目视观察返回激光的位置并根据目视判断光点在激光瞄准仪目视视场内的摆动情况,通过平行移动平移装置和方位微动瞄准仪,使激光光电瞄准仪与捷联惯组棱镜准直,获取准直时激光光电瞄准仪的方位角度和瞄准仪仰角,并将更新后贮存到瞄准控制器上。
c)加注后精瞄。
经过加注粗瞄后,激光光电瞄准仪的平移装置不再进行重新架设。在精瞄阶段只考虑风摆造成的火箭晃动动态偏移。精瞄阶段,瞄准设备向控制系统传递惯组棱镜法线信息。转动激光瞄准仪方位,将望远镜照准惯组棱镜,目视观察返回激光的位置并判断光点摆动中心,微动激光瞄准仪方位,使得返回的激光光点摆动中心与目镜十字丝重合。瞄准设备工作流程见图2。
图2 瞄准设备工作流程Fig.2 Aiming Device Workflow Diagram
3.3 扩大瞄准测角敏区
瞄准敏区2(即±)是指目标棱镜方位转动时,光电瞄准仪获得瞄准信息的角度范围。扩大瞄准敏区,有利于风晃环境下快速捕获返回光束,缩短瞄准时间。瞄准敏区2取决于箭上棱镜的面积(一般用它的宽度表示)、瞄准距离、物镜口径。其计算公式为

根据上述计算公式可知,在箭上棱镜的宽度、瞄准距离、瞄准仰角已经确定的情况下,扩大瞄准敏区的唯一办法就是加大光电准直管的物镜通光口径。根据光学瞄准仪的物镜通光口径、设备体积与质量的比例关系,若物镜口径增加一倍,则仪器质量为原来的8 倍,给制造、运输和使用带来困难,这就限制了直接通过加大物镜通光口径的途径来扩大瞄准敏区。
a)准直工作敏区。
瞄准仪口径,敏区与瞄准距离的关系方程为

激光瞄准仪口径为Φ52 mm,在准直距离150 m 时:=1/2arctan(52/150000)=36″。
因此,瞄准仪口径选用Φ52 mm 时,工作敏区仅能做到±36″。
b)风摆条件下对准直工作敏区的需求。
火箭高度为40 m,火箭的最大晃动幅度±37.5 mm,带来棱镜不水平度变化为arctan(37.5/40000)=±3.23′,瞄准时仰角为15.5°,由此造成的方位偏角变化最大约为tan15.5°×(±3.23′)×60″=±54″。因此激光瞄准仪工作敏区需大于±54″才能够保证精瞄时不会由于惯组棱镜晃动而使返回光点超出瞄准仪工作敏区。
c)增加扩束装置。
图3 为扩束棱镜光斑示意,通过扩大出口光斑宽度的途径来扩大瞄准敏区。即在物镜口安装扩束装置,将原出口光斑直径由Φ52 mm 变为如图3 所示宽度为104 mm 的光斑。加扩束装置后目视准直工作敏区为±72″(棱镜长度大于 104 mm 时),计算如下:=1/2arctan(104/150000)=72″。
图3 扩束棱镜光斑示意Fig.3 Schematic Diagram of Spot with Beam Expanding Prism
实际棱镜有效长度为72 mm 时,加扩束装置后目视 准 直 工 作 敏 区 为± 60 ″ , 计 算 如 下:=1/2arctan((52+36)/150000)=60″。
因此增加扩束装置后激光瞄准仪的准直工作敏区满足风摆条件下工作敏区大于±54″的需求。
d)平移敏区。
当火箭加注、日照变形,或者风摆时,惯组棱镜的运动可以分解为在垂直平面内的转动和水平面内的平移,因此,瞄准仪需要适应火箭一定量的平移,称之为瞄准仪的平移敏区。平移敏区受激光瞄准仪口径,惯组棱镜宽度,惯组棱镜最小有效宽度△约束,关系公式为

瞄准仪口径Φ52 mm,惯组棱镜宽度72 mm,△取经验值20 mm,则=84 mm。即平移敏区±42 mm。
瞄准时火箭的最大晃动幅度±37.5mm。因此,瞄准仪平移敏区±42 mm 能够满足火箭风晃下的精瞄。
3.4 瞄准数据的自动解算及传递
通过瞄准控制器显示屏上的流程控制命令引导操作手完成各项瞄准操作,接收测发控指令和瞄准仪数据,完成瞄准数据自动采集、解算及瞄准结果长距离自动上传。操作时序见图4。
图4 操作时序Fig.4 Sequence Diagram
4 实施效果
快速捕捉飞行器惯组棱镜初始方位的地面瞄准系统,已经完成多次试验任务,工作敏区试验数据见表1,敏区可达到±77″,满足工作敏区大于±54″的需求;瞄准试验结果见表2,功能、性能均满足指标要求。
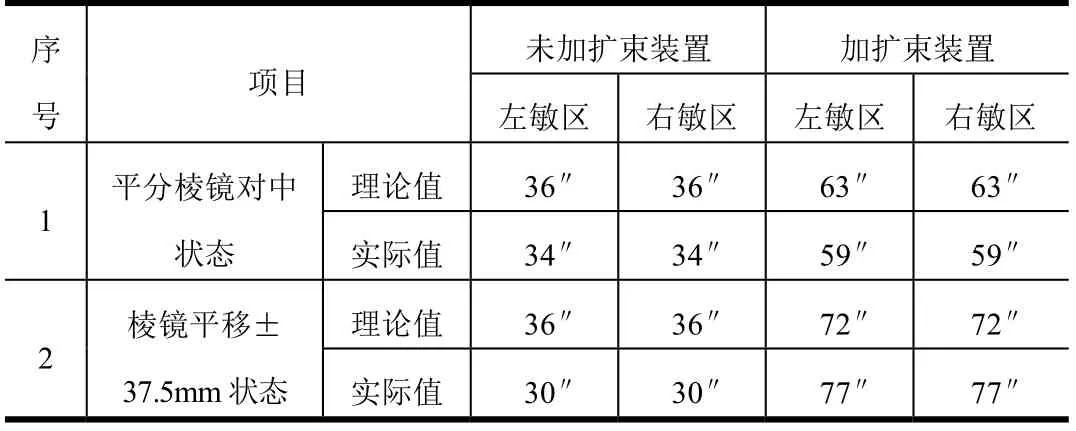
表1 工作敏区试验数据Tab.1 Data of Work-sensitive Zone Test
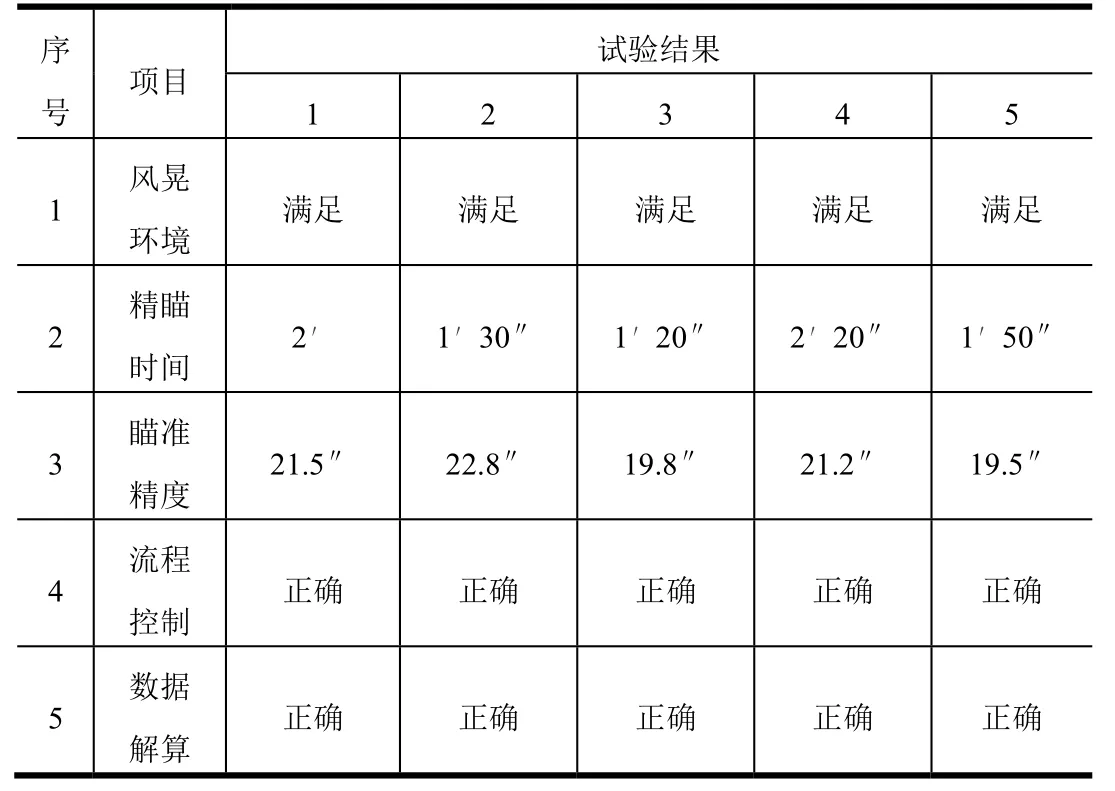
表2 瞄准试验汇总Tab.2 Result of Aiming Data Test
5 结束语
快速捕获飞行器惯组棱镜初始方位的地面瞄准系统,可实现发射台不可旋转、目标棱镜方位变化范围大、风晃环境下的快速、准确的瞄准及瞄准结果自动解算上传,其性能指标已得到充分的试验验证。该系统功能、性能基本覆盖目前运载火箭瞄准需求,采用的技术可推广到基于捷联惯组运载火箭系列的地面瞄准系统中。
