空间飞行器离轨段制导策略研究
2022-08-25张箭飞巩英辉
肖 振,张箭飞,陈 芳,巩英辉,武 斌
(空间物理重点实验室,北京,100076)
0 引 言
随着天地往返技术发展,新型的空间飞行器不断涌现。空间飞行器主要负责将载荷进行定点投放,其运行轨迹按照飞行特点可以分为在轨段、离轨段。其中离轨段通过飞行器携带的轨控发动机制动反推进行减速离轨,减速至满足条件后将载荷投放;高精度离轨制动是确保载荷精准投送的前提,同时在离轨过程中也存在动力、测控等系统方面的各项约束,需通过离轨段制导策略设计进行统筹解决,因此高效可行的离轨制导策略是空间飞行器离轨制动的关键。
目前,对于需要按时返回的空间飞行器,例如神舟飞船、航天飞机、返回式卫星等,离轨均必须采用主动离轨方式,即经过制动前调姿、制动、过渡段惯性飞行3 个阶段,以精确到达再入点,并实施后续进入大气层的再入飞行。
基于空间定点投放任务,对离轨段总体设计条件进行分析,对离轨段设计约束进行梳理,针对设计约束开展制导策略研究,提出解决方案,通过仿真分析对制导策略设计的工程可实现性进行评估。
1 离轨制导总体设计条件分析
1.1 弹道剖面
在进入离轨段后,通过飞行器上携带的反推轨控发动机进行制动减速,降低轨道能量进而使轨道高度逐渐下降,满足离轨条件后,飞行器与载荷分离,完成定点投送任务。
1.2 制导设计条件分析
离轨段制导总体方案设计内容以及涉及到的总体参数如表1 所示。
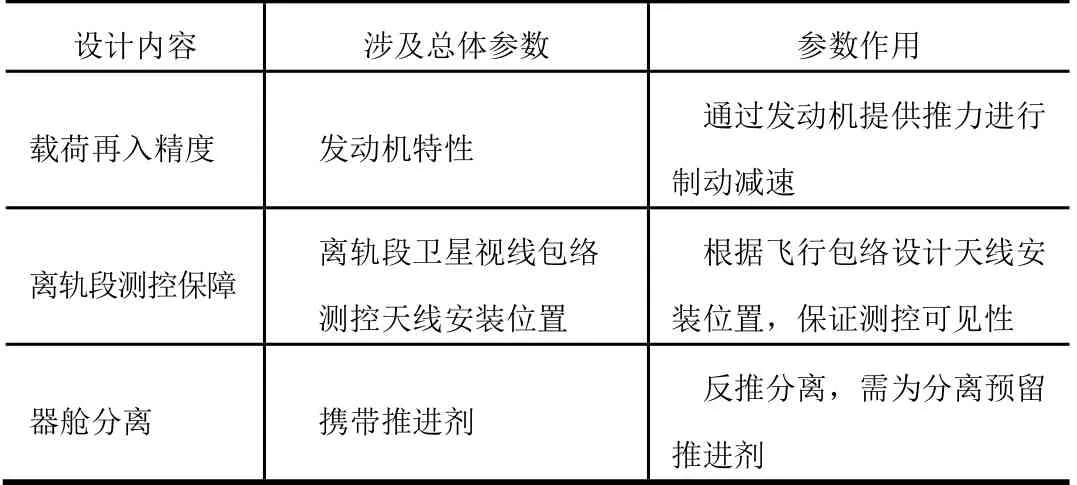
表1 制导设计条件Tab.1 Guidance Design Conditions
2 制导约束条件分析
2.1 定点投送精度约束
经过制动离轨后,飞行器与载荷分离,离轨分离时刻飞行航程精度直接决定载荷再入飞行距离,进而决定载荷飞行的力热剖面。选择合适的离轨制动策略,提高飞行器投送精度,可降低载荷再入过程中力热环境,确保其后续飞行安全。
2.2 推进剂约束
在总体质量确定的情况下,空间飞行器可携带推进剂量受运载能力的制约,离轨段的制动力除了要满足减速需求外,还需要为制动过程中控制飞行高度、弹道倾角提供控制力,同时在轨控发动机存在天地一致性差异的情况下,还需要考虑有限推力作用弧段的引力损失问题,需结合推进剂约束和灵活离轨策略来实现离轨再入的可靠性。
为减少携带载荷,空间飞行器采用反推分离设计方案,利用轨控发动机提供的制动力取代分离弹簧,满足分离条件后,在轨控发动机不关机的情况下进行分离装置解锁,利用轨控发动机产生的制动力,建立起飞行器与载荷的速度差实施分离。受运载器运载能力限制,飞行器自身携带推进剂有限,既要保证飞行器与轨控舱分离时尽量减速至满足再入条件,又要避免分离前轨控发动机推进剂耗尽,影响最终分离。
2.3 天基测控约束
天基测控是确保离轨制动任务可靠、安全实施的必要条件。离轨制动前后需完成制动前调姿、制动减速、分离前调姿、分离触发等关键时序,同时在离轨制动过程中,要监视飞行器位置、速度、姿态、发动机工作状态等遥测参数。天基测控对飞行器具有姿态需求,当天基测控的姿态需求与离轨制动的姿态需求产生矛盾时,应优先满足离轨制动需求,同时离轨制动需充分考虑测控条件的约束,最大化使用测控支持。
3 制导策略设计
针对上述任务剖面分析、设计条件分析以及设计约束分析,开展制导策略设计,针对再入点精度约束,设计了基于推力辨识的制动开机判据;针对推进剂约束与分离可靠性约束,采用视速度增量对剩余推进剂进行预示;针对天基测控约束,在不改变制动推力方向的前提下,通过选择中继星、优化天线安装角度来满足测控对星需求。
3.1 基于推力辨识的制动开机策略
轨控发动机推力偏差是造成离轨航程偏差的主要因素,为了提高航程精度,需在离轨段前获取轨控发动机实际制动加速度,在制动离轨前开启轨控发动机进行推力辨识,根据导航加速度计的输出计算实际推力加速度为
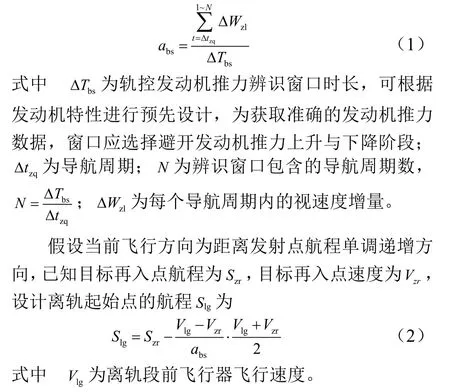
3.2 基于视速度增量的分离判据设计
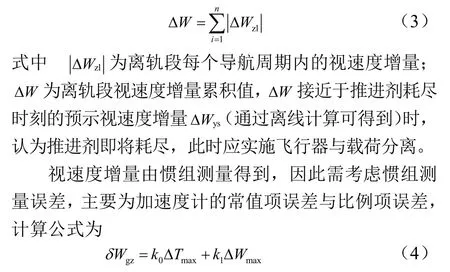
为防止分离前推进剂耗尽,以离轨段轨控发动机开机为起点,采用视速度增量计算方法对轨控发动机消耗推进剂进行预示,每个导航周期内的视速度增量进行累加:

3.3 基于仿真的测控天线安装需求分析
a)确定飞行器所在位置。
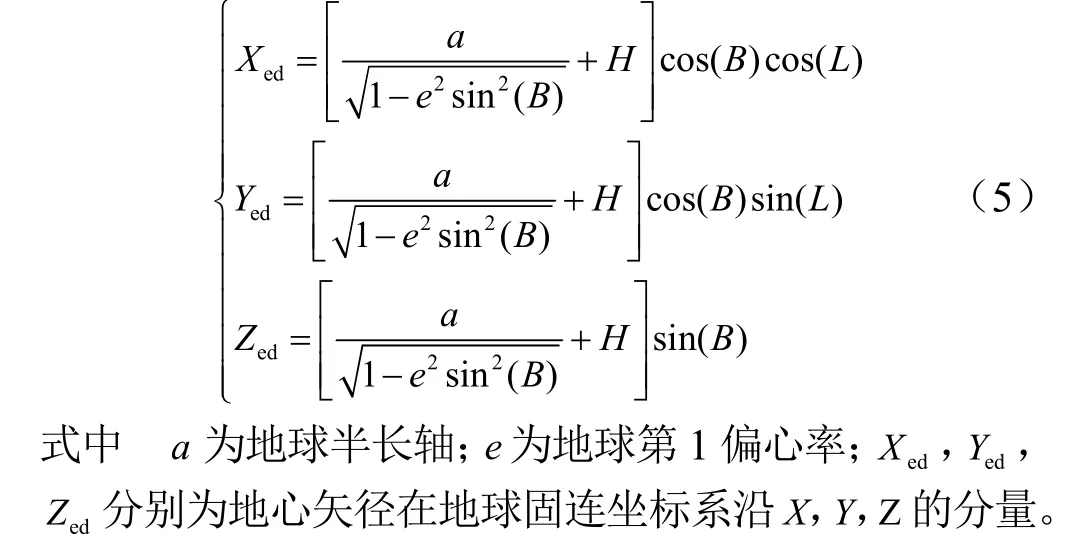
在地球固连坐标系(原点为地心,轴指向格林尼治子午线,轴垂直于地球赤道面指向北极,轴由右手定则确定)对飞行器位置进行计算,已知飞行器经度、纬度、高度(,,)信息,转换至地固系位置:
b)进行覆盖性分析,筛选可见中继星。
由于地球曲率的影响,中继卫星对空间的覆盖区域受到限制,如图1 所示。根据中继卫星对地表的最大覆盖范围计算方法,单颗中继卫星覆盖的最大地球区域对应的半地心角为

图1 单颗导航卫星对地覆盖区域Fig.1 Ground Coverage Area

式中为地球轨道平均半径;为中继卫星高度。
中继卫星为地球同步卫星,轨道高度为36 000 km,地球平均半径为6371 km,代入式(6)计算得到中继卫星覆盖的半地心角约为81°。
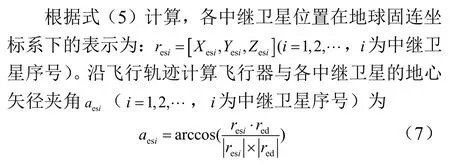
式中为飞行器位置在地球固连坐标系下的表示。
当小于中继卫星覆盖半地心角时,认为中继卫星对飞行器是可见的,根据离轨段沿飞行轨迹计算结果选取可见的中继卫星。
c)根据仿真包络,计算天线安装角。
已知地固系下飞行器俯仰、偏航、滚转角为、、,建立地固系到弹体系转换矩阵如式(8)所示。

中继卫星在弹体坐标系下的位置矢量如式(9)所示。

矢量在弹体系的视线俯仰角、偏航角分别为

弹体系的视线俯仰、偏航角定义见图2,根据中继卫星及偏差组合下的飞行包络,计算视线角包络,以此为参考开展天线安装角设计,为测控方案提供支撑。

图2 弹体系下视线角定义Fig.2 Sight Angle Definition in Projectile System
4 仿真计算与分析
a)仿真参数。
离轨初始点轨道根数如表2 所示,中继卫星轨道根数如表3 所示。
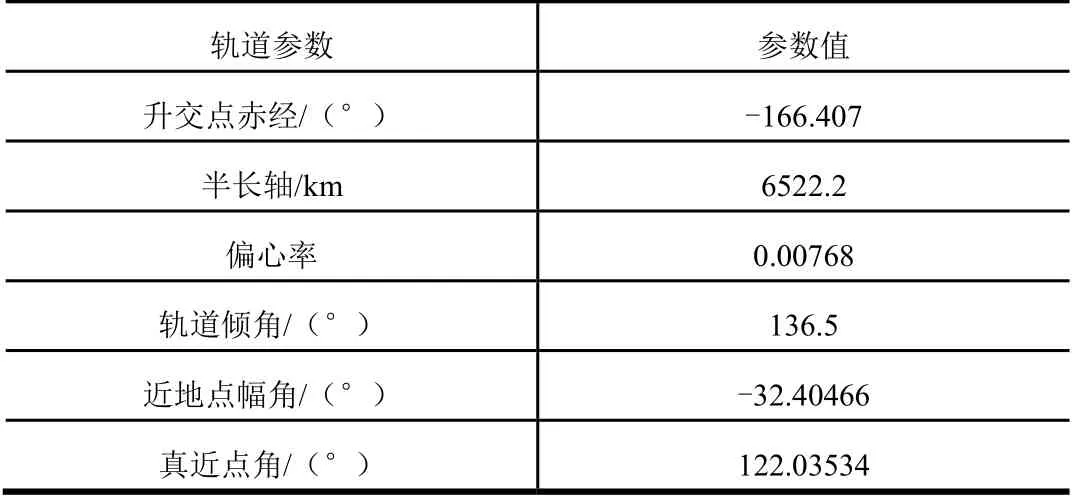
表2 离轨初始点轨道根数Tab.2 Track Parameters of Initial Departure Point
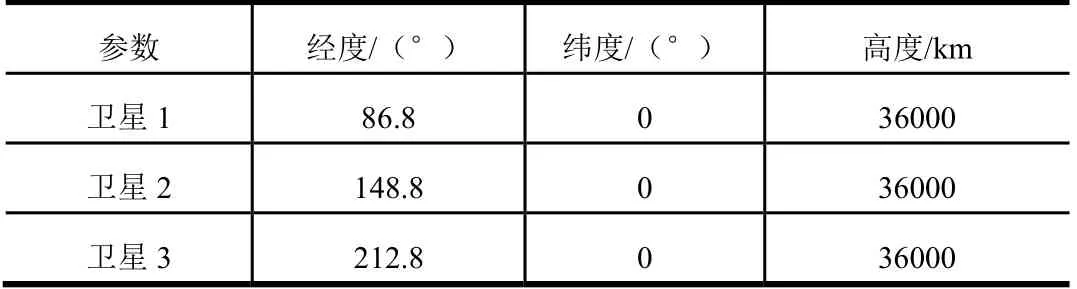
表3 中继卫星轨道根数Tab.3 Track Parameters of Relay Satellite
b)推力辨识制动开机策略仿真分析。
仿真工况中加入+10%的发动机推力偏差,对比有无推力辨识策略情况下的离轨段仿真见图3,3 种工况下的仿真具体指标见表4。通过仿真结果可以看出,在发动机推力偏差+10%的情况下,通过推理辨识策略修正制动起始时间,可以将航程偏差从216.8 km 缩小至69 km,大幅度提高再入点航程精度。

图3 各工况下的离轨段飞行距离Fig.3 Flight Distance of Deorbit Trajectory

表4 离轨段飞行距离Tab.4 Flight Distance of Deorbit Trajectory
c)视速度增量判据设计。
通过大规模仿真对Δ进行设计,在不考虑推进剂消耗上限并采取速度关机的情况下,通过大规模仿真得到视速度增量与推进剂消耗的对应关系见图4。
图4 视速度增量与推进剂消耗之间关系Fig.4 Relationship between Acceleration Increment and Propellant Consumption
根据总体方案,在排除用于反推分离、姿态控制所需的推进剂后,留给轨控发动机的可用推进剂最大值为592 kg。根据仿真结果可以看出,选择轨控消耗到达592 kg 对应的最小视速度增量754.195 m/s,根据式(4)计算后,将视速度增量判据Δ设计为752.324 8 m/s,仿真统计中可以看出,将Δ设计为该指标时,打靶仿真情况下约3.5%的偏差组合状态将会触发视速度增量判据引发器舱分离,飞行器的最大再入速度偏差约为33 m/s。
d)测控覆盖性仿真分析
根据中继卫星位置,沿离轨段弹道首先进行卫星覆盖性分析,仿真结果见图5,可看出离轨段飞行器与2 号中继卫星的地心矢径夹角小于中继星覆盖半地心角,与1 号中继卫星和3 号中继卫星的地心矢径夹角大于中继星覆盖半地心角,因此在离轨段飞行器与2 号中继卫星相互可见,与1 号、3 号中继卫星不可见。

图5 离轨段卫星覆盖性分析Fig.5 Satellite Coverage Analysis of Deorbit Trajectory
进行离轨段偏差组合仿真,得到偏差组合下的2 号中继卫星在弹体系下的视线角包络如图6 所示,可据此设计测控天线的安装角度以及天线波束角范围。

图6 弹体系下视线俯仰角、偏航角仿真包络Fig.6 Simulation Envelope of Sight Angle in Projectile System
5 结束语
基于空间定点投放任务,对离轨段总体设计条件进行分析,对离轨段设计约束进行梳理,针对约束条件进行制导策略研究,通过仿真分析验证了制导策略的正确性与工程可实现性,提高了空间定点投放精度,优化了离轨过程中推进剂使用效率,提升了离轨过程中天基测控的可靠性,为未来空间飞行器定点投送任务制导总体设计提供了支撑。
