高速飞行器横侧向耦合振荡发散机理及控制策略研究
2022-08-25孙超逸刘全军刘秀明
孙超逸,刘全军,王 颖,刘秀明
(空间物理重点实验室,北京,100076)
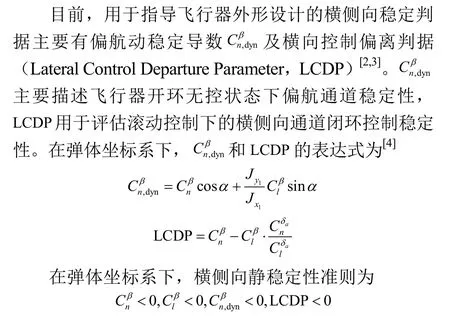
0 引 言
对于面对称高速飞行器,在布局设计过程中重点关注横侧向控制特性,主要由于面对称布局导致横侧向耦合严重,而方向舵的安装位置及偏转范围受防隔热约束,导致横侧向稳定控制是面对称高速飞行器的设计难点。

针对上面提及的横侧向耦合振荡发散问题,本文从机理层面分析出横侧向耦合振荡发散的原因,并从控制角度提出改善横侧向耦合振荡发散的控制策略。最后,通过仿真验证控制策略的有效性。
1 高速飞行器横侧向耦合振荡发散机理
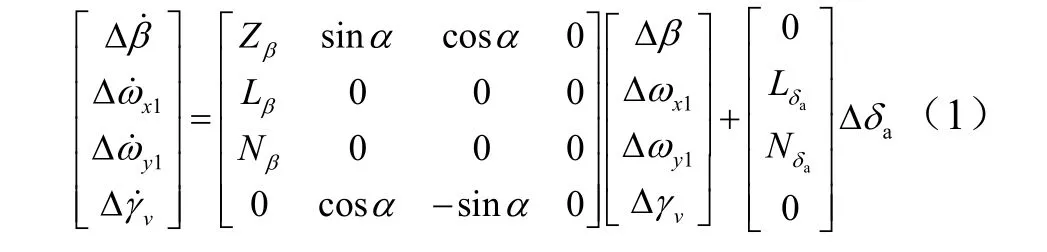
飞行器在正攻角飞行状态下,受限于防隔热的需求和背风面方向舵舵效过低的因素,其横侧向通道控制仅能依靠滚动舵偏(副翼差动),横侧向通道状态方程如式(1)所示,由于重力项、阻尼项对稳定性分析的影响较小,对横侧向状态方程进行了简化,略去了其中的重力项和阻尼项。
飞行器横侧向的运动主要分为3 个典型的运动模态:滚转模态、荷兰滚模态和螺旋模态。在外界瞬时扰动下,横侧向各个飞行状态随时间的变化就是这3个典型模态的迭加。在横侧向的3 个运动模态中,荷兰滚模态最重要的,在很大程度上表征了横侧向的动稳定性。
常规控制策略是滚动舵偏反馈倾侧角实现指令跟踪,反馈滚转角速度增加阻尼,控制方程为

应用根轨迹法进行分析,在正虚轴平面,随着滚转舵偏对滚转角速度反馈增益的增大,闭环极点是逆时针接近零点的,由于阻尼较小,零极点均非常靠近虚轴,如果零点位于极点之上,那么增益设计空间很小,系统很容易出现正根,造成振荡发散;如果零点位于极点之下,就可以避免出现正根。因此问题的关键在于明确零、极点在虚轴投影的位置关系。
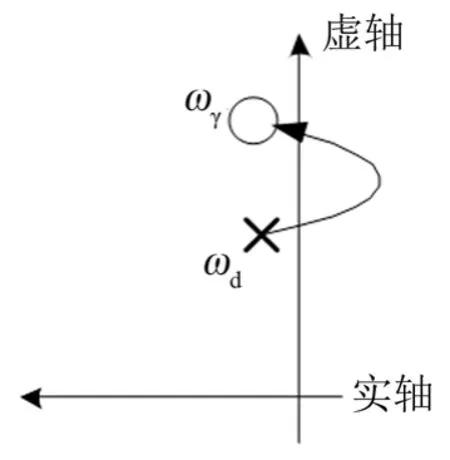
图1 零极结构根轨迹Fig.1 Root Locus Diagram for Zero-pole Configuration

图2 极零结构根轨迹Fig.2 Root Locus Diagram for Pole-zero Configuration
根据式(1),可以推导得到由气动导数表示的传递函数:


2 针对横侧向耦合振荡发散问题的控制策略研究


图3 kvγ 变化时根轨迹对比Fig.3 Comparison of Root Locus Diagram with variable kγv
3 仿真验证
典型飞行工况下,飞行器横侧向运动方程为
这些蛋白不断进步的同时,显微镜技术的发展也使人们得到更清楚的图像,科学家希望以此解决神经科学最大的谜团:脑中的细胞是如何共同运作将电信号转换为思想、行动和情感的。研究者仍然希望可以捕捉到全范围的脑活动,并试着设计出新方法来观察脑组织内快而深的神经冲动。如果这些技术难题被攻克,纽约市哥伦比亚大学研究神经环路功能的拉斐尔·尤斯特(Rafael Yuste)指出:“这将是革命性的。”

采用常规控制策略,控制方程为
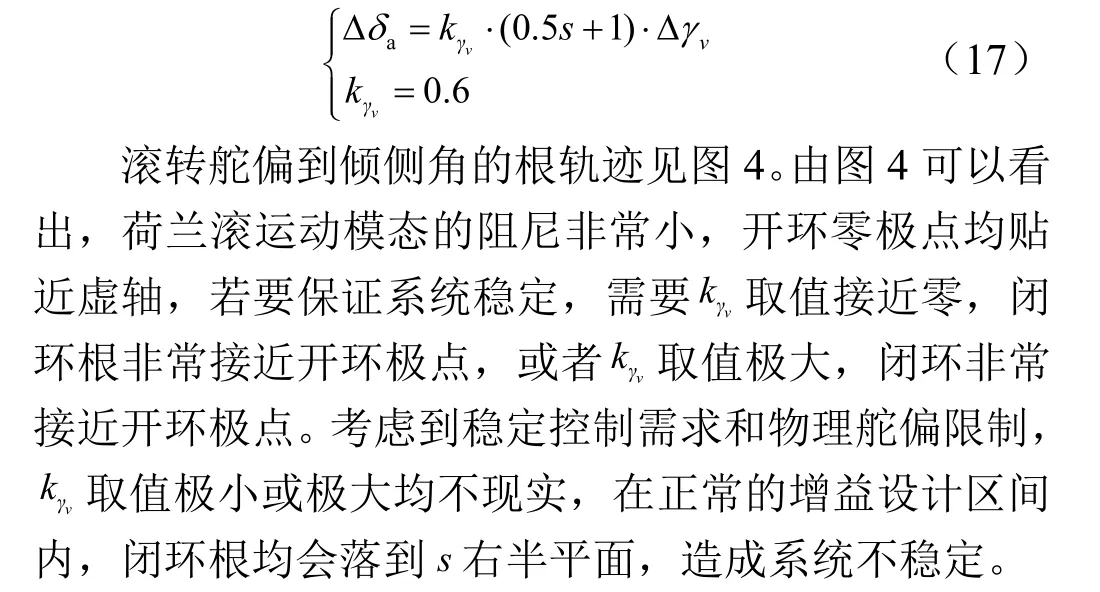
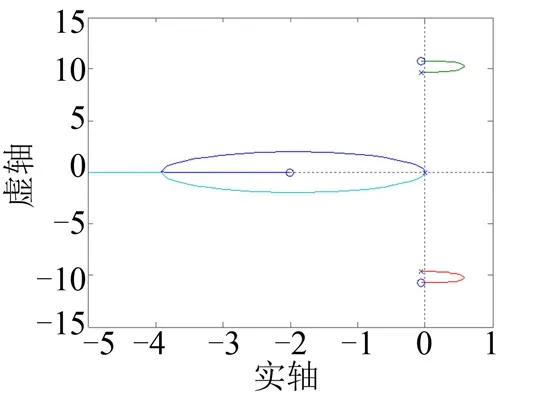
图4 kγv 变化时的根轨迹曲线Fig.4 Root Locus with Variable kγv

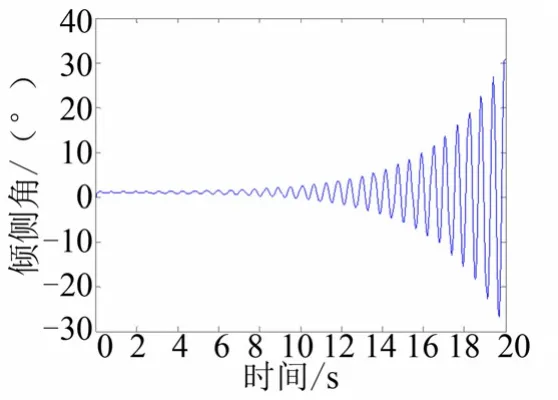
图5 倾侧角阶跃信号响应曲线Fig.5 Step Response Curve of vγ #
增加滚转舵偏对侧滑角的反馈后,控制方程为


图6 kβ = 3,变化时的根轨迹曲线Fig.6 Root Locus with Variable ,kβ =3

图7 倾侧角阶跃信号响应曲线Fig.7 Step Response Curve of vγ
4 结束语
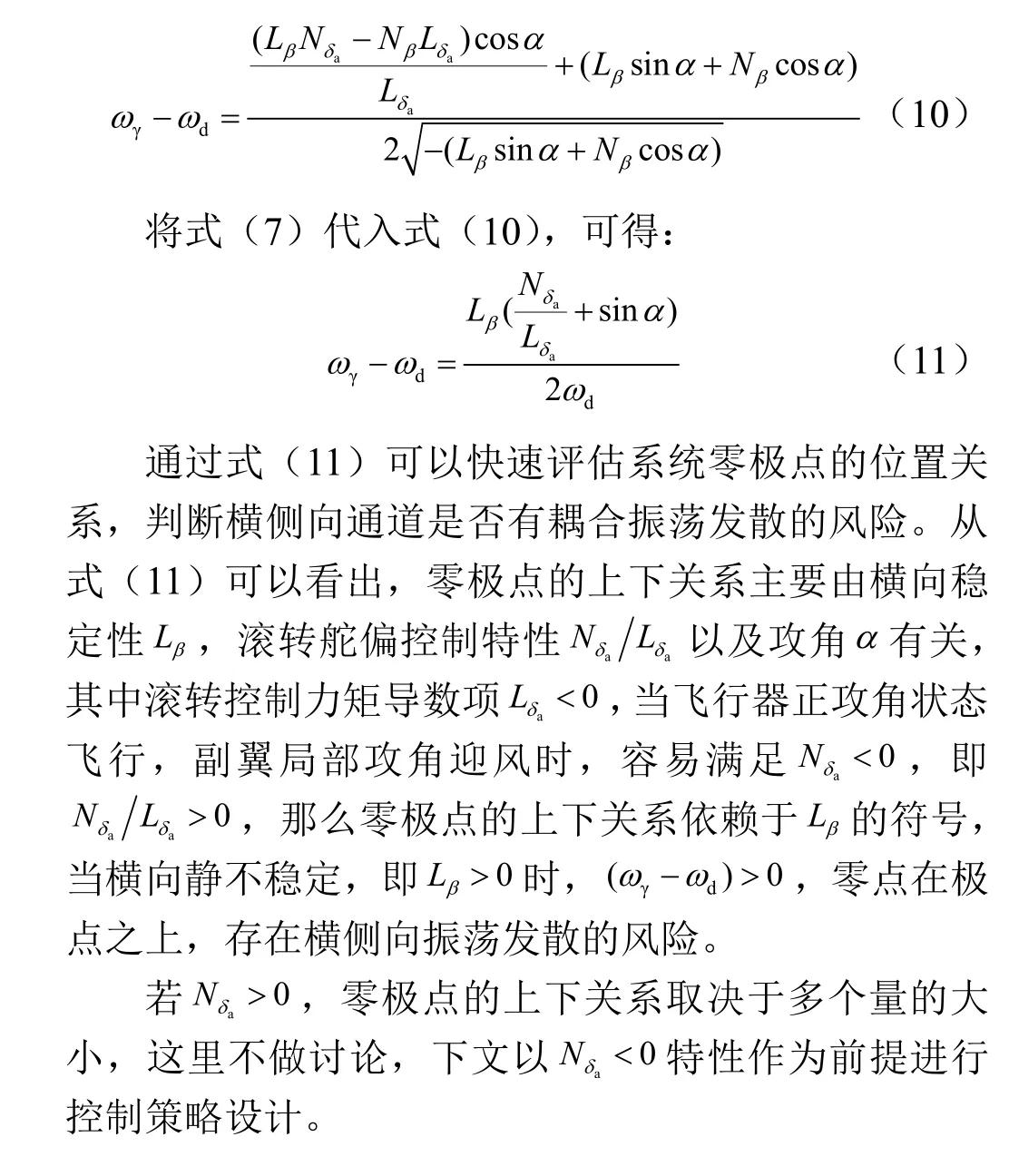
针对高速面对称飞行器存在的横侧向耦合振荡发散问题,从机理层面推导出耦合振荡发散的原因,从而推导出横侧向零极点的位置关系是影响横侧向振荡发散的主要原因,在不改变气动外形且不使用方向舵的前提下,提出增加滚转舵偏反馈侧滑角的控制策略来抑制横侧向耦合振荡发散,通过机理分析及仿真验证,这种控制策略抑制横侧向耦合振荡发散是有效的。
