基于向量场法的固定翼无人机制导算法的设计与实现
2022-08-24周晨昶王道波
周晨昶,王道波,王 猛
(南京航空航天大学自动化学院,江苏 南京 211106)
0 引言
无人机大致分为消费级与工业级2类[1],前者主要用于个人娱乐、拍照创作等,后者可进行地形勘探、搜索救援以及多种军事用途等。无人机之所以能在众多领域发挥作用,较为重要的一点在于它能够较为精确地跟踪预设航线飞行[2]。同样,无人机在飞行前,地面站会向飞控系统设定预设的航线,无人机在空中能自主跟随预设的航线路径,完成飞行任务。
针对路径跟随这项技术,国内外的学者做了很多研究。依据解决策略的不同,大致分为2类。一类被称为几何学方法,如追踪法[3]、视线法[4-6],以及本文将重点介绍的向量场法[7-9]。追踪法要求无人机的速度矢量始终指向目标方向,视线法则设置虚拟点,逐步将无人机引导至路径上,这些技术主要用于导弹制导方向。Kothari等[10]曾将追踪法与视线法相结合,提出了PLOS(pure pursuit and line-of-sight)算法,使得无人机可以更好地在有风环境下实现路径跟随。Park等[11]提出一种基于虚拟目标点的非线性制导律,使得无人机在飞行过程中逐步收敛至目标路径。也有学者将几何学方法与智能算法相结合,如Tabatabaei等[12]将Carrot-chasing算法与遗传算法和模糊控制相结合,提出了三维模糊Carrot-chasing(3D fuzzy Carrot-chasing)算法,使得无人机在风干扰环境下拥有更好的路径跟随结果。另一类被称为控制学方法,分为线性控制技术与非线性控制技术,主要以非线性控制技术为主。工程应用中较为常见的便是PID控制技术。Rhee等[13]对传统PID技术进行改进,加入前馈环节,大大提高了无人机的路径跟随性能。主要的一些非线性控制技术包括线性二次型调节器(LQR)[14-15]、滑模控制[16]、模型预测控制[17]、自适应控制[18]等。Wu等[19]在风扰动环境下,将无人机的飞行控制系统简化为4个回路,并对每个回路设计不同的非线性控制器,以实现三维空间内的路径跟随问题。基于非线性控制理论的路径跟随技术往往具有更好的鲁棒性,使无人机具有更好的飞行稳定性。但此类方法较为依赖数学模型,实际应用相对复杂。
针对众多的路径跟随算法,许多学者进行了结合或比较。Xue等[20]将Carrot-chase与PLOS这2类算法进行比较,发现只要选择合适的制导律增益,两者均能较好地实现路径跟随。Sujit等[21-22]将5种不同策略的路径跟随算法进行比较,加入风场扰动,并通过蒙特卡罗模拟,最终发现向量场法有着更好的抗风干扰能力,能够更为有效地实现路径跟随。
路径跟随算法的选择往往要在控制精度与计算工作量之间进行权衡。本文为提高某中小型固定翼无人机在有风环境下的控制精度,优化路径跟随性能,设计了一种基于向量场的侧向制导算法,代替了基于PID的侧向制导算法。最终通过数字仿真实验,证明了向量场制导算法的优越性,通过半物理仿真以及实际飞行,验证了该算法与PID纵向制导算法融合后,可控制该固定翼无人机在有风干扰的环境下更好地实现路径跟随。
1 问题描述
首先给出本文所考虑的无人机数学模型,然后给出路径跟随问题的数学模型。飞行路径主要由直线段和圆弧段构成,本文主要考虑直线段与圆弧段的路径跟随问题。
1.1 无人机数学模型
无人机的横向与纵向控制系统包含3个闭环回路[23],在设计时,增稳回路和姿态回路的传递函数增益近似为1,横向和纵向控制回路的简化框图分别如图1和图2所示。

图1 横向运动控制回路简图

图2 纵向运动控制回路简图
动力学方程即可表示为:
(1)
(2)
滚转角指令以及俯仰角指令可表示为:
(3)
(4)

实际飞行中,航线角指令χc往往会实时变化,而高度指令hc往往以固定值的形式由预设航线给定或者由地面站发出,纵向自动驾驶仪将自主控制无人机跟随指令高度飞行。因此,接下来主要讨论直线段与圆弧段路径的侧向跟随问题。
1.2 路径跟随
直线段路径侧向跟随俯视图如图3所示。
图3中,O为路径起点,χq为目标路径的航线角,ePx和ePy为无人机与目标路径的航迹误差分量,通过坐标转换可表示为

图3 直线段路径跟随俯视图
(5)
定义1:当ePy近似为0且数值稳定时,无人机便完成了直线段路径侧向跟随,且ePx数值越小,无人机的侧向制导效果越好。
圆弧段路径侧向跟随俯视图如图4所示,其中d为无人机与圆弧中心点的距离向量;φ为其对应的相位角;向量m与圆弧相切,其方向角为χo。

图4 圆弧段路径跟随俯视图
经过坐标转换,得到无人机在d方向与m方向上的运动情况为
(6)
即:
(7)
(8)
定义2:当‖d‖近似等于ρ且数值稳定时,无人机便完成了圆弧段路径侧向跟随。
加入风扰动后,无人机的地速矢量Vg,空速矢量Va和风矢量W的关系如图5所示。在xy平面讨论无人机侧向制导问题时,运动学方程可表示为:

图5 无人机地速、风速和空速矢量关系
(9)
(10)
2 无人机路径跟随算法设计
2.1 PID制导算法
该无人机的俯仰指令公式[24]和滚转指令公式[25]为:
(11)
(12)

2.2 向量场侧向制导算法设计
PID侧向制导算法实时计算出无人机飞行过程中所需的滚转指令,现基于向量场的思想,设计一种利用侧偏距,实时计算出航线角指令输入χc的侧向制导算法 。
该算法只考虑侧偏距作为影响航线角指令变化的唯一因素,因此即使当风等外部干扰存在时,只要当无人机的侧偏距存在,横向姿态控制回路便会收到相应的航线角指令,以控制无人机消除侧偏距,完成侧向制导。
2.2.1 直线段路径侧向制导
无人机进行直线段路径侧向跟随时,当前位置的期望航线角即可作为侧向制导所需的航线角指令χc。这些期望航线角可以理解为具有指向功能的向量,构成了侧向制导所需的向量场,如图6所示。

图6 基于向量场法的直线段路径侧向制导策略
图6中,χ∞表示当无人机远离路径时的期望航线角,此时无人机几乎径直飞向路径。当无人机位于路径右侧时,χ∞=χq-π/2;当无人机位于路径左侧时,χ∞=χq+π/2。当ePy=0时,χc=χq。
定理1:假设无人机以恒定的速度飞行,目标直线段路径方向已知,为完成侧向路径跟随,无人机在当前位置下的期望航线角可表示为
χc(ePy)=-arctankmePy+χq
(13)
km为常值系数。km的取值影响了反正切函数值的变化速率,进而影响了期望航线角从χ∞到χq的转换速率。
当|χq-χ|>π时,此时给出的航线角指令往往要求无人机调整的航线角度超过180°,如图7所示。

图7 靶机的航线角与指定航线角相差较大
此时,χc>0。无人机航向控制回路会严格跟踪航线角指令,此时无人机完成侧向制导所需调整的角度为χ+χq;如果χq可用略小于-π的角度进行表示,则χc<-π,无人机便会向左调整航向,更利于飞行。那么,此时目标路径的航线角χq可表示为
(14)
n∈N,其取值使得|χc-χ|<π;单位向量q=(qnqe)T指向路径方向,qn、qe分别为北向和东向的分量。完成航向调整后,再将当前航向χ与航线角指令χc调整至区间[-π,π]内。
2.2.2 圆弧段路径侧向制导
与直线段路径侧向制导原理相同,无人机圆弧段路径侧向制导策略如图8所示。
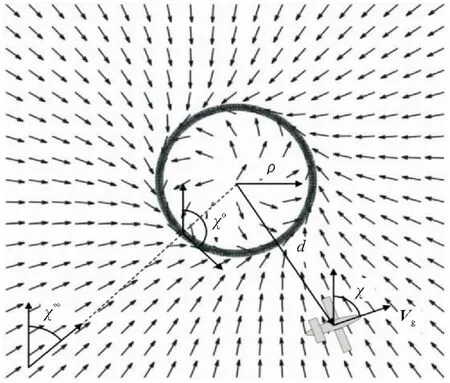
图8 基于向量场法的圆弧段侧向制导策略
图8中,χo为无人机在圆弧段路径上飞行时的期望航线角,可表示为
(15)
χ∞为当无人机远离圆弧段路径时的期望航线角,此时无人机几乎径直飞向圆弧中心,表示为

(16)
其中,当无人机准备以顺时针方向驶入轨道时,λ=1;当无人机准备以逆时针方向驶入轨道时,λ=-1。
定理2:假设无人机以恒定的速度飞行,目标圆弧段路径位置已知,为完成圆弧段侧向路径跟随,无人机在当前位置下的期望航线角可表示为
(17)
kn为常值系数。kn的取值同样影响了输入的航线角指令的过渡速率。侧向跟随过程中,无人机在逐渐贴近圆弧段路径飞行时,航向变化最大。若kn取值过大,航线角指令变化较为急促,不利于飞行;若kn取值过小,航线角指令变化不及时,难以满足路径跟随要求。
同样在实际的应用中,无人机在进行圆弧段侧向路径跟随时,部分位置会发生航线角指令的突变,以图9为例。
在图9a中,无人机的当前航线角大小为π,由于航线角的变化区间为[-π,π],当无人机经过该位置时,航线角指令χc≈-π,受控的航向会发生2π的突变;图9b中,无人机经过该位置时,相位角φ同样会发生幅值为2π的突变,从而造成航线角指令的变化。因此,当|χc-χ|>π时,需对无人机相位角进行修改,即

图9 航线角指令发生2π突变
φ=arctan(pe-ce,pn-cn)+2πn
(18)
n∈N,n的取值使得|χc-χ|<π,航线角指令便不会发生幅值为2π的突变。
3 仿真实验与实际飞行
首先通过数字仿真实验,将基于向量场的侧向制导算法与PID侧向制导算法进行对比,以证明前者的优越性;然后采用改进制导算法对固定翼无人机进行了半物理仿真试验,以证明算法有效性。
3.1 数字仿真实验
仿真实验包括3部分,分别为近距离直线段路径侧向跟随、远距离直线段路径侧向跟随和圆弧段路径侧向跟随。假设无人机的初始航向为90°,飞行速度为20 m/s。运算步长为0.01 s。

3.1.1 近距离直线段路径侧向跟随
目标路径y=0,无人机的初始位置为(0,100),风速为6 m/s,方位角为315°。2种控制算法的仿真结果如图10~图13所示。图10为近距离直线段路径的侧向跟随结果,图11、图12和图13分别为无人机侧偏距、航线角和滚转角的变化曲线。

图10 近距离直线段路径跟随结果

图11 侧偏距变化

图12 航线角变化

图13 滚转角变化
采用向量场法时,无人机在30 s左右完成侧向制导,跟随误差2.1 m;采用PID制导算法时, 无人机54 s后跟踪误差收敛至2.1 m内,但航向并不稳定。
上述结果可以看出,向量场制导算法控制下的无人机收敛至目标航线的时间更短,航向控制更为精准,跟随误差更小,同时滚转角振荡较少,飞行更平稳。
3.1.2 远距离直线段路径侧向跟随
目标路径y=0,无人机的初始位置为(0,400),风速为6 m/s,方位角为315°。2种控制算法的仿真结果如图14~图17所示。

图14 远距离直线段路径跟随结果
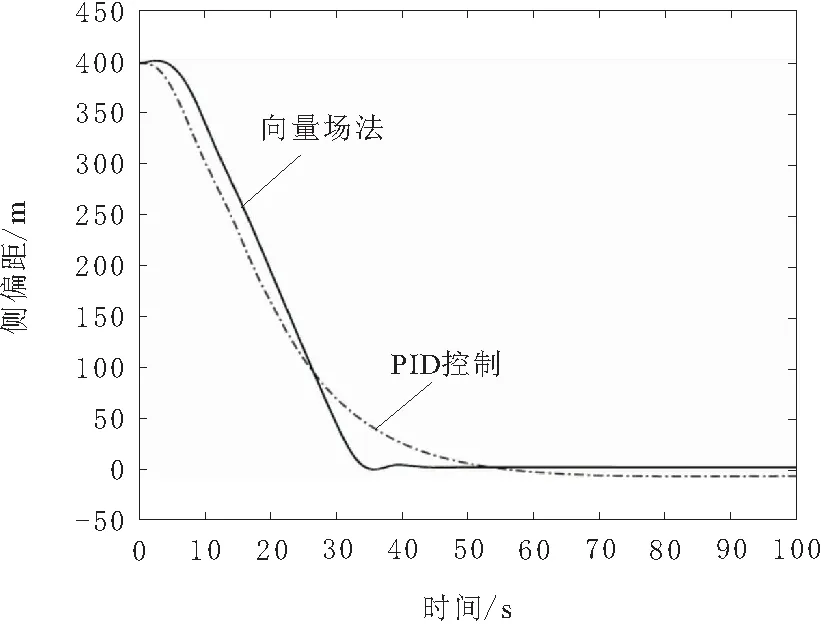
图15 侧偏距变化
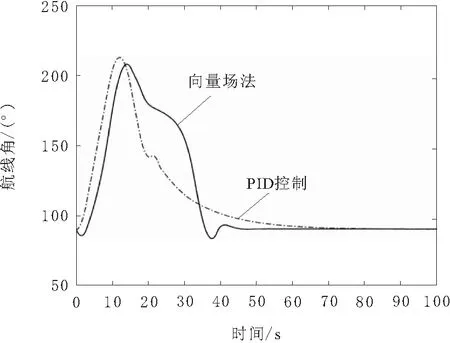
图16 航线角变化

图17 滚转角变化
采用向量场法时,无人机46 s后实现航向稳定,完成侧向制导,跟随误差约3.5 m;采用PID制导算法时,无人机77 s后完成侧向制导,跟随误差约为5.5 m。
当无人机距离目标航线更远,向量场制导算法的优势更加明显。向量场制导算法控制无人机收敛至目标航线的调节距离明显更短,飞行曲线更为平滑,跟随误差更小,制导效果明显更优。
3.1.3 圆弧段路径侧向跟随
期望圆弧段路径由2个半径为200 m的半圆弧组成,无人机初始位置为(0,200),风速为6 m/s,方位角为315°。2种控制算法的仿真结果如图18~图21所示。

图18 圆弧段路径跟随结果
2种算法控制下的无人机在前半段路径中的跟随效果相仿,但在后半段路径中,采用PID制导算法时,无人机出现较大的震荡与超调,随后逐渐收敛。从图20和图21中可以看出,向量场制导算法控制无人机74 s完成圆弧段的飞行任务,而PID制导算法控制无人机81 s完成圆弧段的飞行任务。

图20 航线角变化情况

图21 滚转角变化情况
总体而言,在圆弧段路径侧向跟随任务中,向量场制导算法控制下的无人机飞行耗时更短,跟随误差更小,飞行过程更加平稳,制导效果更好。

图19 侧偏距变化情况
3.2 半物理仿真实验
搭建仿真平台,开发环境选用Microsoft Visual C++ 6.0。依据该无人机具体参数,结合6个动力学方程和6个运动学方程构造其数学模型。无人机起飞方式为弹射起飞,仿真平台中包含了火箭助推器模型以及发动机模型[26],以模拟无人机的真实飞行。同时,加入水平方向上的常值风,模拟风的干扰。
选择向量场法为侧向路径跟随算法。模拟起飞前,上传预定航线至飞控系统,输入无人机起飞点的经纬度以及起飞时的航线角和俯仰角,输入干扰风的方位和风速。模拟起飞后,仿真平台接收飞控传入的舵面信息并经过解算,将取代GPS以及陀螺仪,发送经纬高、航线角、三向加速度以及欧拉角等数据给无人机的飞控系统。飞控接收后进行解算,同时控制舵面偏转,完成路径跟随,并将所有数据由无线电台发送至地面站,地面站可观测飞行期间所有状态数据,且全程可控。半物理仿真流程如图22所示。

图22 仿真流程
输入无人机起飞时仰角大小为15°。风的方位角设为45°,风速大小为6 m/s。仿真结果如图23和图24所示。

图23 侧向路径跟随

图24 纵向高度跟随
图23中,坐标(0,500)为起飞点,无人机在第二圈飞行不久后进行回收。飞行曲线平滑,无明显抖动与振荡,无人机与直线段路径和圆弧段路径贴合度较高,高度跟随过程较为平稳,路径跟随情况良好。向量场侧向制导算法与纵向制导算法融合效果较好,验证了向量场侧向制导算法的有效性。
4 结束语
为提高某中小型固定翼无人机在有风环境下的路径跟随性能,本文设计了一种基于向量场的侧向制导算法。该算法通过提供实时精准的航线角指令,控制无人机迅速调整姿态,修正航向。数字仿真实验表明,在有风的环境下,与原PID侧向制导算法相比,该算法控制无人机收敛至目标航线的调节时间更短,调节距离更短,航向控制更加精准,跟随误差更小,飞行过程更加平稳,制导效果明显更优。最终,半实物仿真实验证明了向量场侧向制导算法与PID纵向制导算法可较好融合,算法改进后的无人机拥有更好的抗风干扰能力,路径跟随性能明显增强。
