太阳能多垄蔬菜坐水移栽机设计①
2022-08-24郑君发梁秋艳刘训报王万营孙玲杰
郑君发, 梁秋艳, 刘训报, 王万营, 王 雨, 孙玲杰, 杨 爽
(佳木斯大学机械工程学院,黑龙江 佳木斯 154007)
0 引 言
我国是世界上最大的蔬菜生产国和消费国,从播种育苗到收获的过程中有多个环节,而蔬菜移栽是此过程中重要的环节之一,特别是在冬季蔬菜反季种植需求量大的情况下,移栽对于蔬菜产量的提高更加重要[1]。目前,蔬菜移栽主要以人工为主,费时费力,效率低,达不到理想效果。采用机械移栽,可以很好的提高作业效率,且能保证移栽的秧苗在株距、行距、入土深度上保持一致,更好的提高秧苗的成活率及蔬菜产量[2]。但是在机械移栽中,部分还需要人工进行投苗,影响作业效率及产量[3]。本文设计一种太阳能多垄蔬菜坐水移栽机,由太阳能提供电力,有效节约能源;通过机械手抓苗代替人工投苗,同时进行多垄坐水移栽,有效提高移栽效率、降低人力成本与劳动强度、提高秧苗成活率。
1 整体设计及工作原理
太阳能多垄蔬菜坐水移栽机结构示意图如图1所示,装置由太阳能光伏板发出电能,晴天时进行电能收集,存储于挂式蓄电池中,以备阴天时使用。电源采用并联式油电混合动力源,防止因电动力不足导致无法正常进行工作。
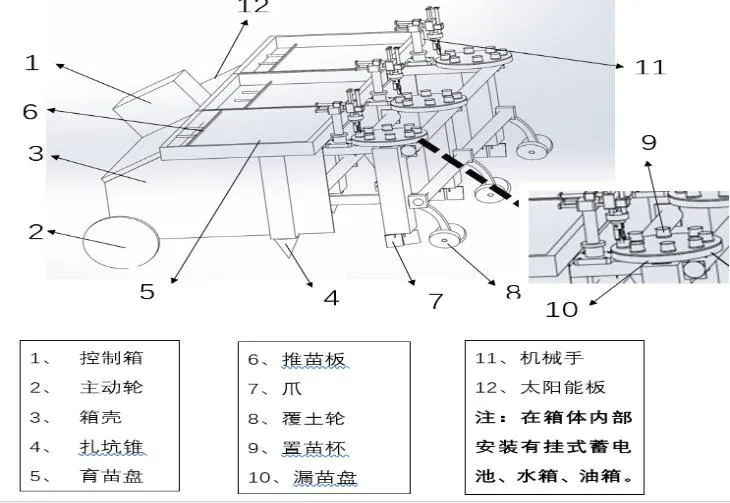
图1 整体设计图
工作时,控制系统控制机械爪的工作频率,将秧苗从育秧盘中取出放置到漏苗圆盘中。育秧盘的设计上,在机械手的相对端增加了推板,推板推进的频率与机械手抓取苗的频率相同,从而能够减少机械手的工作行程,提高工作效率。圆盘分为上下两层,工作时上下两层圆盘相反方向运动,漏苗频率与机械手抓苗频率成线性关系,完成抓苗、漏苗。装置的扎坑结构通过动力系统运作带动其上下规律性运动,进行扎坑,锥头附近配有注水口进行注水,保证蔬菜幼苗移栽之后的水分需求。漏下的秧苗坐水后经覆土轮压实,保证水分有效的被幼苗吸收,提高秧苗成活率。
2 硬件设计
2.1 机械爪设计
机械抓通过X,Y,Z三轴的移动,实现在立体空间的转动取苗任务,工作示意图如图2所示。本装置机械爪在X,Y轴的伸缩距离各是50cm,在Z轴上的伸缩距离是60cm。装置横宽为200cm,放置三个机械爪可以最高效率的完成抓取作业。机械爪上安置了胶性物质,减小对秧苗的伤害,同时具有二力平衡反馈装置。通过单片机控制机械手抓力的大小区间,通过最短路径高效率的将秧苗从育秧盘抓至漏苗圆盘中。
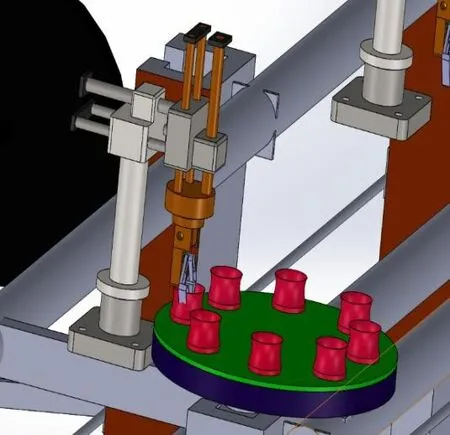
图2 机械抓工作示意图
2.2 漏苗圆盘设计
漏苗圆盘为直径为150mm,圆盘上面均匀分布着8个直径为20mm的落苗孔,机械手走完行程刚好定位到其中一个落苗孔,机械手松开将秧苗落入落苗孔中。通过转速和抓取的频率的调节,实现同频率。
2.3 育秧盘设计
如图4所示,设计100cm×50cm×8cm大小的育秧盘,在育秧盘的后部有推板,随着育秧盘上秧苗的减少将剩余的秧苗推进,通过减少工作距离保证机械手工作速度。

图4 育秧盘示意图
2.4 落苗平土部件设计
落苗平土部分主要由落苗拨片和覆土轮两部分构成,如图5所示。覆土轮由两个轮子夹角成40°定轴摆放,夹角顶点的高度距离地面10cm,实现覆土的同时保证不伤害幼苗。
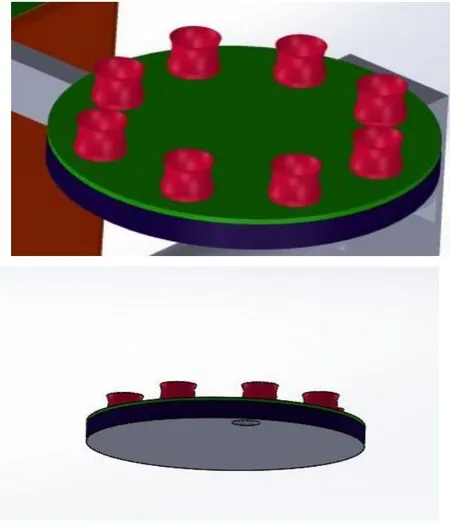
图3 漏苗圆盘示意图

图5 落苗平土部件设计
秧苗从套筒下落时考虑高度的因素,设计落苗爪,通过落苗拨片与竖直的套筒形成的角度,减少竖直方向的向下冲力,从而保证秧苗根部培土量最大成度的保留。落苗的套筒采用伸缩式,能够更好的应对多种地形造成的伤害,并且套筒内部还有凸起的减速瓣膜,有“减速带”的作用。落苗拨片(爪)共两片,安装在一个旋转轴承上,形成更大角度的工作空间。
3 控制系统设计
3.1 STC89S52单片机
装置核心控制系统采用STC89S52单片机,此单片机集LM324红外信号转换电路、光电测速信号接口、蜂鸣器报警装置、4位数码管显示屏等功能于一体,灵活支配各部分工作[4]。STC89S52单片机最小系统如图6所示。
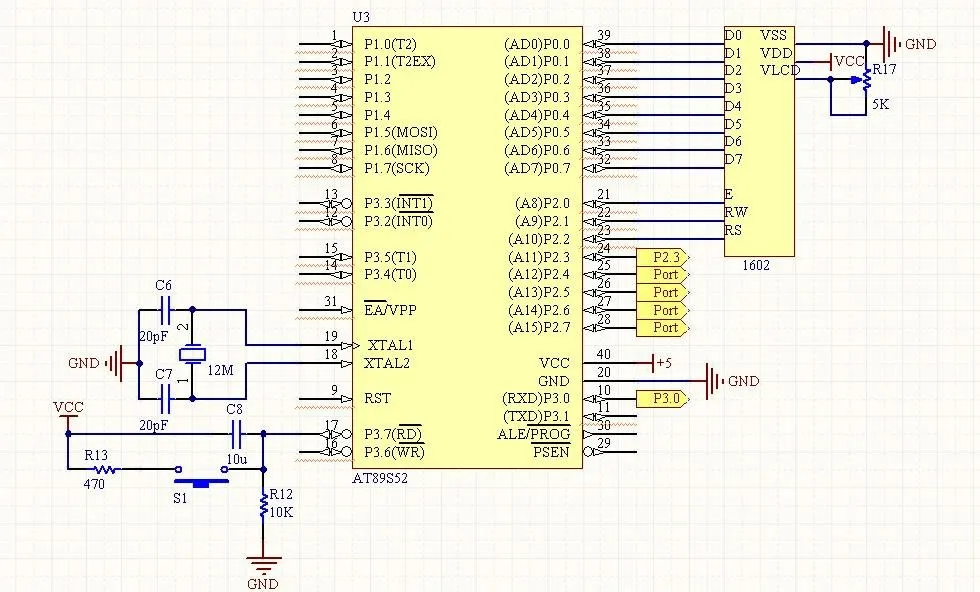
图6 STC89S52单片机最小系统
单片机控制系统结构图如图7所示,系统实现带全向轮的两轮驱动避障以及循线,感知模块为超声波和红外传感器。
图7 单片机控制系统结构图
3.2 超声波与红外传感器
装置采用HC-SR04型超声波测距模块,可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm,模块包括超声波发射器、接收器与控制电路,实现小车的避障功能[5]。
3.3 红外循迹模块
图9是一个四路的红外循迹模块,其原理是利用红外传感器感知车轮下是否有目标线(黑色),然后将这个数据交给单片机处理后控制相应的电机,红外模块的读取只需要用到单片机的输入IO,实现装置循线功能[6]。

图9 红外循迹模块
3.4 电机驱动模块
单片机的电压输出为5V且其电流输出很微弱,而电机是一个较大功率的用电器,因此要使用一个驱动模块,单片机只需要输出逻辑控制信号便可以控制电机的转动[7]。图10是L293D电机驱动模块,通过对信号线(M1A,M1B)的控制进而驱动电机。

图8 HC-SR04型超声波模块

图10 电机驱动模块
3.5 调速电机
装置安装调速电机,通过单片机控制电机的运行,然后控制传送带的运输,保证幼苗能进去到落苗口,同时将幼苗输送时间相同,保证幼苗规律进行移栽。调速电机如图11所示。

图11 调速电机
4 仿真分析与试验
4.1 机械爪旋转运动性能分析
机械爪做旋转运动时力学分析结果如图12所示。
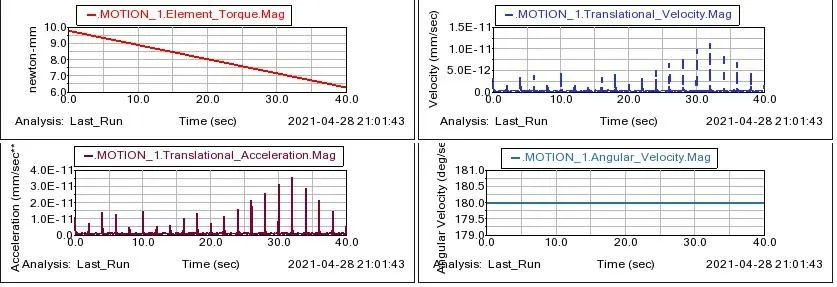
图12 机械爪旋转运动分析
机械爪做360°旋转运动进行对苗圃的抓取过程中,转矩的大小从开始的9800N·M下降到6200N·M,表明机械爪在启动过程中需要较大的转矩,在启动后转矩逐渐平稳,能够实现平稳抓取过程。平动速度和平动加速度是波动式变化,表明转动过程中机械爪力发生了变化,符合抓取过程中的变化,转动角速度为π/s,表明2s中转一圈,实现一次抓取。
4.2 机械爪抓取运动性能分析
机械爪做抓取运动时力学分析结果如图13所示。
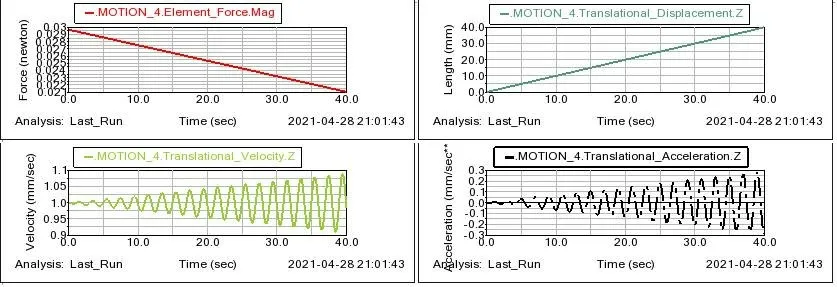
图13 机械爪抓取过程图
机械爪抓取秧苗过程中,力是逐渐下降的,平动位移是逐渐增大的,平动速度和平动加速度呈现一种波浪式变化,说明抓取过程是直线运动和圆周运动几个运动在空间叠加在一起,抓取过程是一个复杂的变化,仿真结果表明,设计的机械爪可以实现抓取过程。
4.3 试验结果
根据文献调研,秧苗的最佳移栽距离与秧苗的根系、株高等因素有关[8]。以芹菜为例,种植本芹,株距为8cm左右,亩栽苗45000株左右;种植西芹,株距为20厘米左右,亩栽苗16000株左右。芹菜采用平畦沟栽的方法进行定植,在畦面开小沟,沟深10cm左,保证根部入土的深度,提高成活率。本移栽机经试验测试,测得的移栽西芹秧苗数据结果如表1所示。
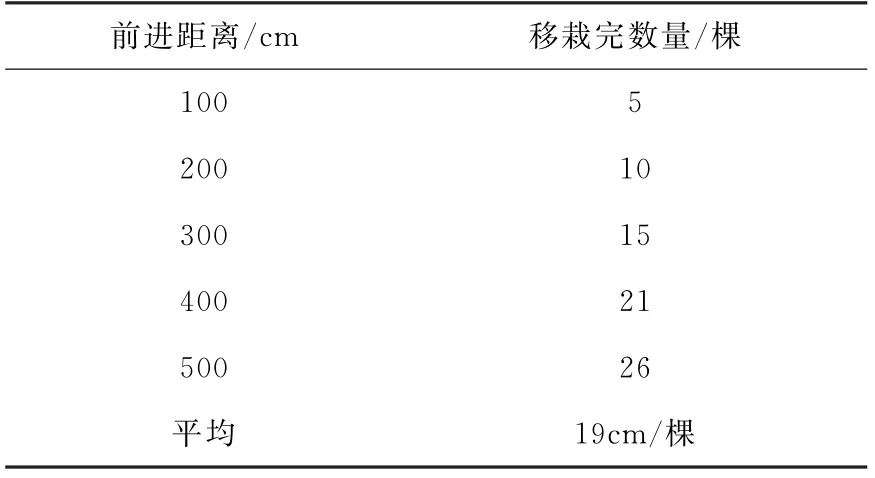
表1 移栽机前进距离与移栽量数据实验表
从表中数据可以看出,移栽的西芹秧苗平均株距为19cm/棵,株距合理且机器速度稳定,以一亩地666.67m2的推断,可以满足西芹生长密度。从最初的工作几下到移栽20几下后,在长时间的多次工作中机器仍旧能够保持相对稳定的前进速度及工作频率。株距间距也比较均匀,满足西芹的生存条件,秧苗成活率较高。
5 结 语
设计一种油电混合动力系统的太阳能多垄蔬菜坐水移栽机,对装置的硬件和控制系统进行设计,提高蔬菜秧苗移栽作业效率;对设计的机械爪进行力学性能仿真分析研究,仿真结果表明,设计的机械爪可实现精准、稳定抓取秧苗,设计准确。试验测试结果表明,该移栽机移栽西芹秧苗速度较快,效率高,落苗速度恒定,损苗率低,秧苗株距合理,成活率高。
