变电站边缘计算多无人机协同避障方法
2022-08-22王干军江玉欢丁宗宝温佳静
王干军,江玉欢,丁宗宝,温佳静
(1. 广东电网有限责任公司中山供电局,广东 中山 528400;2. 武汉大学电气与自动化学院,湖北 武汉 430072)
1 引言
随着无人机技术的成熟,无人机在电力系统中得到了广泛的应用。在输电线路、配电线路的机巡中,应用图像识别技术以及红外检测技术,基于图像识别技术对缺陷进行预判已经较为成熟,逐步进入实用阶段[1]。
由于无人机续航能力有限,采用单台无人机开展巡检工作效率显然很低,现有电力巡检要求也开始要求无人机搭载多种载荷开展巡检[2,3]。显然,采用多无人机开展协同巡检,是提高机巡效率的有效手段。
与输电线路、配电线路机巡相比,在变电站中开展机巡由于空间有限,带电高压设备密集,对飞行和避障的精度要求显然更高。通常采用的避障手段是通过双目识别或者毫米波雷达进行避障[4-5]。文献[6]提出了一种基于迭代重组(iterative recombination,IRIS)和人工势场(artifical potential field,APF)相结合的避障方案。文献[7]对农田环境中的障碍物进行了分类,并提出了作业视场的避障分区及各区避障策略。文献[8]采用自下而上的建模方法,对单个个体建立变系数控制器,包括一致性运动模块和避障模块,提出自组织避障的控制策略,实现了集群自组织避障。
在变电站中开展机巡工作空间有限,选择小型无人机显然更加合适,因此无人机的载荷也相对而言有限。为了避障,单一无人机搭载多种检测装置显然不现实,而变电站内有大量的监控终端数据,或者是多台无人机协同飞行的数据可以参考。
边缘计算适用于具有海量数据特征的业务动态管理、边缘化安全隐私防护等技术需求[9],其中下行数据表示云服务,上行数据表示万物互联服务。有数据表明,物联网产生数据的45%都将在网络边缘处理[10]。文献[11]提出了提出基于边缘计算的主动配电网的PTN物理架构模型,构建了基于边缘计算的分层自治协同的主动配电网信息物理系统(CPS)管控模型。
与现有方法相比,本文将多台巡检无人机以及变电站摄像头的数据整合,并提出一种基于边缘计算框架的分析方法,在匹配特征点以及线段后,可以全面分析障碍物的外形以及动态特征,从而可以提前为无人机避障提供精准的分析及计算依据。
2 变电站边缘计算框架
边缘计算中涉及三类设备:边缘终端,边缘服务器以及中心节点。在变电站中,涉及到机巡的边缘终端包括监控摄像头,红外摄像头以及无人机等多种终端;边缘服务器主要是架设在变电站,用于数据分析的服务器;中心节点则隶属于区域中心,例如集控站中的计算及分析平台,通常基于云计算技术实现。
与民用边缘计算的应用有差异的是,变电站中应用边缘计算时,边缘终端的数量要少,但计算分析的数据量大,实时性要求也高。电力系统当中的机巡目前已经开始尝试无人机的自主飞行。
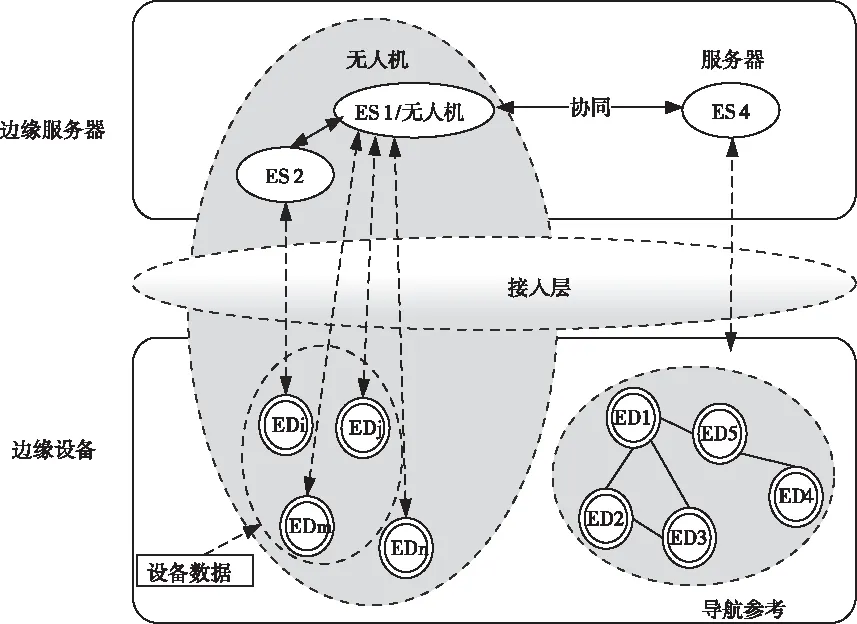
图1 变电站机巡避障边缘计算架构
采用边缘计算通常需要将数据通过互联网与云平台进行交互,本应用中飞行的基础三维数据相对固定,而在变电站固定环境中避障,需要提高计算效率,因此,不需要与云平台互动。由此,采用边缘计算对临时出现的障碍物进行辨识、避障的架构如图1。
变电站无人机在巡检过程中,既要通过可见光、红外等设备检测设备的缺陷,也要采集边缘终端上相应的设备数据供缺陷以及故障的诊断。
由于变电站中设备较为密集,采用毫米波雷达信号进行避障难度较大,在目前可见光设备分辨率较高的情况下运用该技术较为合适。当前变电站中监控的覆盖率相当高,充分利用现有的摄像头的边缘终端数据,基于无人机机巡任务,对障碍以及障碍的性质进行判断,从而做出合理的规避判断决策。
3 边缘计算协同避障算法
3.1 避障算法流程
对变电站障碍进行分析,首先需要对变电站中的障碍性质进行判定并进行相应处理:
1)静态障碍:在变电站中永久增加的障碍,如设备机柜、端子箱等;包括临时增加的施工设备、现场改换位置的设备或者是检修装备。
这样一些静态障碍在检测到后,无人机通过避障算法修改巡检路径,在安全区域内通过。障碍在系统中记录,如果是永久增加的静态障碍,多次巡检中均可以发现,此时应在后台三维模型中对数据进行人工确认与更新,对巡检线路也进行相应的更新;对临时出现的静态障碍,障碍消除后恢复原始飞行线路,自动更改飞行线路后也需要后台确认。
2)动态障碍:在变电站中移动的人或者是检修车辆、装备等;在变电站中协同当前无人机开展巡检的自动化装备,如其他的无人机或者机器人等。
对于随机运动的人或者设备、装备,需要充分预留相应的空间、选择避障线路或者返航;对于协同飞行的设备或装备,由于飞行或者运行线路都提前经过设计,因此,不需要避障,除非检测到设备运行偏离了预设的轨迹和路径。
由此,整个算法的流程图如图2所示。

图2 机巡协同避障算法流程
障碍定时检测可以根据需要设置,日常应用中可以设定为30秒。在边缘计算的机巡协同避障中,障碍物的识别、分类以及规避航线的设计是本文讨论的重点。
3.2 障碍物识别及分类
单一运用BIM信息和毫米波雷达导航误差较大,而变电站中设备密集,毫米波雷达的应用受到一定限制。有研究提出以伪距、伪距率差分信息,惯导航向与磁航向的差值信息,以及惯导高度与气压高度的差值信息作为观测量,采用多源数据融合的方式提高导航精度[12]。
3.2.1 障碍物识别特征
现有变电站中有大量的监控探头,也有大量的历史监控图像供比对。由此,为减少边缘计算的计算量,障碍物特征识别采用以下步骤分析计算。
1)对摄像头的彩色图像采用差异图识别方法,对无人机飞行航线上的图像进行预处理。现有图像分析方法可以基于单帧图像局部差异特征开展分析[13]。显然,在绝大多数情况下,变电站中的障碍物具有一定的体积,通过简单对比即可初步判定。在本应用中,为提高分析效率,不需要对图像进行复杂的图像边缘特征分析[14],如图3只需要在无人机飞行航线及邻近区域上初步判断是否存在障碍物即可,采用改进后的最为简单的比值法进行判定。
图3 航线障碍物比值判定法
图像首先经过预处理,包括几何配准、几何校正以及图像去噪,并划分为9块。对于摄像头采集到的两幅单帧图像,进行图3的划分,其中M×N为航线的飞行包线及邻近区域。
由此,对于图3中每一块的航线障碍物比值可以按照式(1)计算
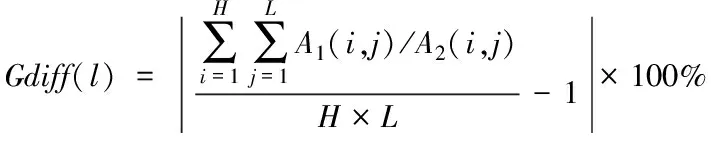
(1)
其中,H,L分别为图块的像素长和宽,i,j分别为像素点在分块中的坐标,l为图块的序号。A1和A2分别为作为对比标准图片与飞行前航线上对应拍到的图片。
则判定航线上没有障碍物的公式为
∀Min(Gdiff(l))〈TGl∈{1,2,3,…,9}且l≠5
(2)
其中,TG为图块判定差异过大的阈值,一般定为10%。如果超过阈值,则可以认定整个图片覆盖区域都被障碍物所阻碍。
TR为判断航线图块5中是否存在障碍的阈值,一般设定为5%。通过该公式,可以用比较粗略的办法处理图像噪声。显然,在一张照片上,噪声数据相对比较一致,采用本方法,可以粗略判断给定区域是否存在障碍物。
2)无人机对障碍物的精确识别采用双目识别算法[15],选择图块5中Gdiff(l)中前10%的像素点开展分析,显然最有可能优先发现障碍物。该方法可以有效判定障碍点的景深。双目识别采用图4所示的识别方法,其中Lb是左右相机之间的固定基线长度,f为相机焦距,ul和ur分别为P点在左右相机上投影坐标的横坐标,视差d=ul-ur。

图4 障碍物识别特征

(3)
(4)
双目识别算法较为成熟,但也存在一定的判定误差。通过变电站其它方位的摄像头SC1、SC2,可以协同参与判定障碍物特征点位置是否精确。由此,LC、RC、SC1以及SC2可以自由组合,通过本节的同构相机算法,或者异构相机算法,对障碍点的位置进行精确判断。为使用本文提到的双目识别,对于部分没有摄像头覆盖的区域,可以应用多无人机的巡检线路合理设计,为安全飞行提供有力的支撑。
3.2.2 障碍物三维拼接
目前对于立体视觉的研究多从图像的边缘信息、颜色信息、光流场的变化和立体视觉。与地面机器人巡检不一样的是:由于无人机巡检在空中,一旦运动起来惯性较大,要实现精确避障控制存在较大的难度。还需要指出的是,不停的通过SLAM建模来判别障碍物的形态,对于无人机的续航、计算资源要求以及巡检进度都会有较大的影响。
通过多个摄像头以及多无人机摄像头获取的图像拼接为立体图形,有利于提前规划安全的路径。为此,基于多个位置的摄像头数据,实现障碍物的静态识别。对于一个物理实体而言,其外边缘在绝大多数情况下是由线段或曲线组成,在一张照片中,线段或曲线的特征具有相似性。由此,基于障碍特征点的外延,可以预先判定障碍物的外轮廓,从而为选择避障路径提供依据。
1)关键点匹配
关键点匹配采用灰度匹配法计算,一旦两个点匹配,则进一步判断是否归属于同一条线段。
2)线段关联
定义N(t)是t时刻已存在的环境特征,n′(t)为t时刻变电站摄像头或者变电站摄像头与多个无人机镜头合作采集的图像,n(t)为对应时刻无人机双目识别采集的数据。由此,根据式(5)可以准确判断在两个图像中基本重合或者部分重合的线段。

(5)

3)轮廓生成
应用多无人机以及变电站中摄像头采集的数据,通过宽度优先迭代算法,就可以将障碍物的三维轮廓生成。
3.2.3 障碍物动态识别
通过3.2.2节的障碍物静态识别算法,可以分析出障碍物的三维轮廓。障碍物的组合可能比较复杂,包括静态和动态的部分,例如:巡检人员带着巡检设备到现场,两者都会成为障碍物的组成部分,但是可能只有巡检人员在现场走动,是动态障碍物。
为简化分析,本文暂时不考虑运动速度变化较大的动态障碍物。通过改进的尺度不变特征变换SIFT(Scale-Invariant Feature Transform)算法,可以快速判断障碍物的移动方向与速度。
3.2.4 避障过程
图5给出的是避障算法的流程,其中左下角表示有障碍物以及巡检人员,巡检人员可以移动。正常情况下,无人机沿着线路1飞行,如果碰到障碍物,则需要进行决策。多无人机在飞行时,
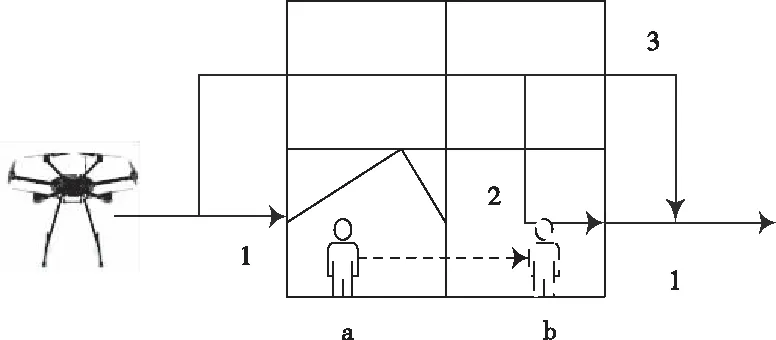
图5 避障过程示意图
无人机避障的线路,在躲过障碍物后应尽快恢复到原始线路,如图中线路2,3所示。在变电站中,出于飞行安全考虑,应优先选择图3中的1,2,3,4,6几个方位中没有障碍物的线路飞行。
1)如果是静态障碍物,则在绕过障碍物后,恢复到原始巡检线路即可,如图5线路2。
2)如果是动态障碍物,如图5中的人从位置a向位置b移动,则根据动态障碍物的移动方向,移动速度并充分预留余量后选择避障线路,如图5线路3所示。
3)如果没有合适的避障线路,则无人机原地等待10秒后再次检测并规划避障线路。
4)如果无人机剩余电量有限,则放弃本次巡检并返航。
4 实验结果及分析
实验所采用一台台式服务器作为边缘计算服务器,配置为:XeonSilver 6130 2.0GHz CPU,128G内存,在Windows操作系统下对中山某变电站进行基于边缘计算无人机协同避障测试。选用2台自主研发的四旋翼无人机,对变电站瓷瓶开展巡检工作,飞行时间15分钟,覆盖巡检线路的现场有4个摄像头。由于变电站中开展机巡都是精细巡检,飞行速度控制在0.5m/s以内,重点部位需要定点拍照。
现场模拟测试如图6所示,其中(a)为正常无障碍的情况,(b)为存在静态障碍物的情况,(c)为存在动态障碍物的情况。
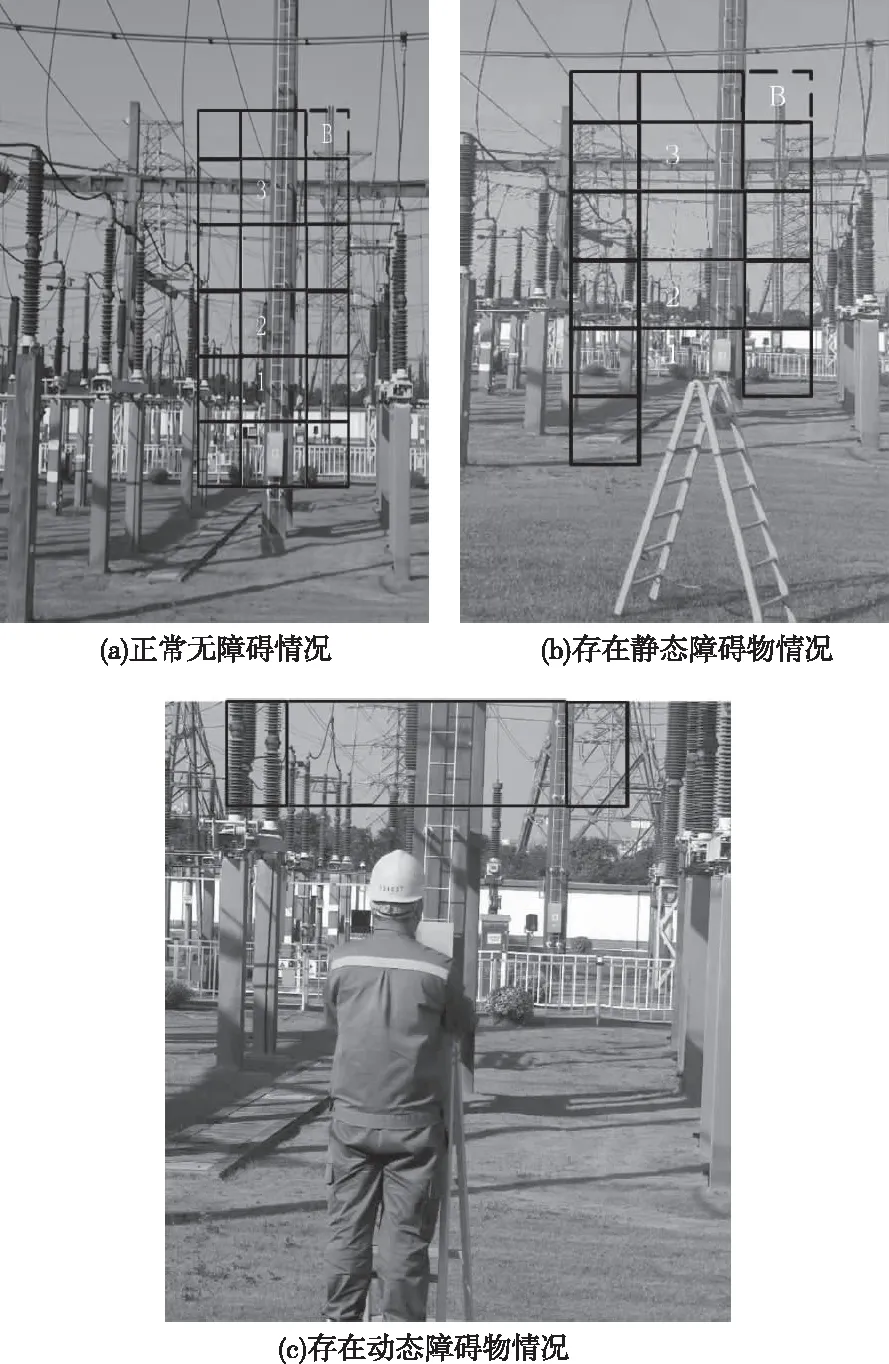
图6 避障选择测试
无人机A主要任务是巡检,为全面观测瓷瓶的状态,需要分别从图6 (a)中标注为1,2,3的方位飞行,标注为绿色;黄色为优先可以选择的备选路径;红色为无人机最大可以飞行的边界,即无人机飞行的电子围栏。而线路B上的无人机B主要任务是为巡检提供避障参考,即图6(a)中右上角绿色的部分。无人机A需要与设备尽可能的接近以方便检出故障,对避障的要求高;而无人机B不需要贴近设备,对避障的要求不高。
经过现场5条线路,选择8:00,10:00,12:00,15:00,17:00五个时段进行测试,500架次飞行的结果可以得到以下主要结果:
1)对于静态障碍物,无人机可以在优选路径,或者电子围栏内飞行,如图6(b)所示;对于动态障碍物,如人、车,则对于可选路径的要求更为严苛,如图6(c)所示。
2)最早在8.73s即可判定,通过监控摄像头数据即可;最短在2.46s可以判定,障碍物较为隐蔽,通过2台无人机协同分析才能得到结果。结合摄像头数据后,对障碍物外轮廓的判断可以提高3~5秒。
3)平均避障检测时间为3s,由于变电站中精密巡检时速度较低,按照0.5m/s的速度以及飞控的响应时间,1.5s以内可以完成检测以及线路的重新规划。
4)光线过强、光线过暗,都可能影响到障碍物检测的准确性。检测率与障碍物的性质也有密切关系,这主要是由光线与障碍物自身颜色的反差决定。
针对不同尺寸,不同性质的典型障碍物,有以下有效避障率数据。
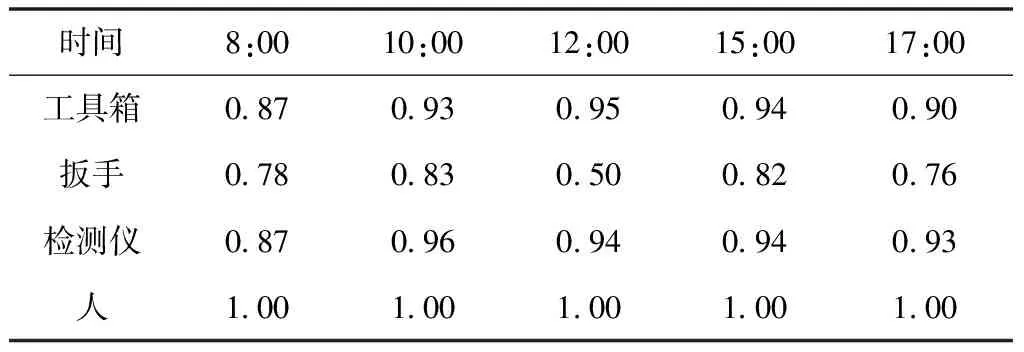
表1 有效避障率
从数据分析可以看出,体积大的障碍物识别效率显然更高。其中,巡检人员处于运动状态,由于在工作区域佩戴安全帽,可以有效识别和避障。暗色工具箱在光线不强的情况下避障有困难。以扳手为代表的金属材质工具在强光下,如果角度不理想也存在避障困难,但在实际工作中,处于影响飞行路径的情况比较少见。
现场检修设备以及遗忘在现场的设备是对无人机飞行安全可能造成影响最为普遍的障碍物。针对光线对检测率的影响,在不影响检修装备性能的前提下,在纯色装备上贴上彩色标签或者涂上颜色,如图7所示,在暗色或者强光下,可以大幅度提升障碍物识别的精确度,对比数据见表2。

图7 检修设备改造

表2 改造后有效避障率
实用过程中,本文提出的协同避障算法不仅可以确保无人机飞行安全,也可以检测到现场需要清理的遗留工具、设备或者是垃圾。
5 结论
无人化巡检是变电站巡检未来发展的趋势,无人机是其中重要的组成部分。
提出了协同利用无人机及摄像头数据的边缘计算框架。基于此架构,能比单纯采用无人机摄像头数据提前3~5秒完整判断障碍物形状。
现场实验验证表明,现有避障算法可以有效提前完成障碍物检测与避障路线的规划,验证了算法的可行性和合理性。
光线、障碍物的性质与检测率有着密切关系,可为今后现场设备,人员装备的设计、巡检方案的选择提供参考。