大型空间展开臂地面微重力试验方案设计与验证
2022-08-22胡添元雷海鸣王浩威何鹏鹏宋晓东
胡添元 雷海鸣 王浩威 何鹏鹏 宋晓东
(1 北京空间飞行器总体设计部,北京 100094)(2 北京理工大学 宇航学院,北京 100081)(3 北京卫星制造厂有限公司,北京 100094)
随着航天技术的飞速发展,空间可展开机构作为航天器分系统的重要组成部分,在高精度天线、星载雷达、空间望远镜以及大功率太阳翼展开过程中发挥着越来越重要的作用。同时,随着航天器任务需求越来越复杂,大型空间展开臂也逐步由单维度、单自由度、小型化向多维度、多自由度、大型化发展[1-6]。
大型空间展开臂臂杆细长、结构刚度低,是一种典型的刚柔耦合系统,因此展开运动过程中伴随着小幅度柔性运动[7-10]。为复现其真实在轨工况,与之匹配的地面微重力试验系统也越来越复杂。如何在有限资源条件下提出合适的技术指标,实现精确模拟空间的微重力环境,成为航天器系统部件地面验证试验面临的难题。
目前,空间展开臂地面微重力试验方法主要有悬吊法、静平衡法、水浮法和气浮法[11-12]等。悬吊法应用最广泛,其特点是结构简单,但吊丝与滑轮间存在摩擦阻力,并且吊丝不易控制,颤动情况下容易导致试验系统精度降低。静平衡法依据能量守恒利率,保持重力势能与弹性势能总分和不变,利用钢丝、弹簧滑轮等部件实现微重力模拟,但精度差。水浮法在进行试验时,水的阻力和惯性将影响试验系统准确性,且维护成本过高。气浮法通过反作用力抵消试验设备重力,具有阻力小、可靠性高、随动性能突出等优点,广泛应用于二维平面运动,但难以应用于多维空间运动。
本文在大型空间展开臂地面微重力试验需求分析的基础上,设计了一种智能跟随气浮与悬吊相结合的地面微重力模拟试验系统,在动力学建模与仿真的基础上,完成了系统卸载效率的指标分配和地面微重力模拟试验。
1 地面微重力试验系统设计
1.1 试验需求与任务分析
地面微重力试验要对空间展开臂及其反射器模拟件进行展开过程跟踪以及零重力卸载,展开臂的臂展10.9 m,整体为悬臂梁结构,末端负载要进行空间六自由度运动,该系统需要保证臂杆展开空间的适应性和可靠性以及跟踪轨迹的精确性。其中,展开臂关节处的附加阻力矩和卸载效率作为试验系统的重要指标,需要进行重点分析。
试验系统要求展开方向附加阻力矩最大不超过关节锁定力矩40 N·m的50%,即20 N·m,卸载效率满足95%精度要求。对于大型空间展开臂微重力模拟设备,各吊点对卸载效率要求不同,需要将卸载效率分解到各个吊点,合理分配卸载力。
1.2 试验系统设计
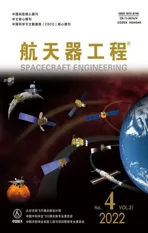
基于智能跟随气浮与悬吊法结合的地面微重力模拟系统,能够高效、高精度的完成展开试验,将试验系统设计为垂直悬吊装置和六自由度重载智能跟随气浮车两部分,其中垂直悬吊装置用于卸载大臂的重力,六自由度重载智能跟随气浮车用于卸载小臂、模拟负载和气浮托架的重力,如图1所示。
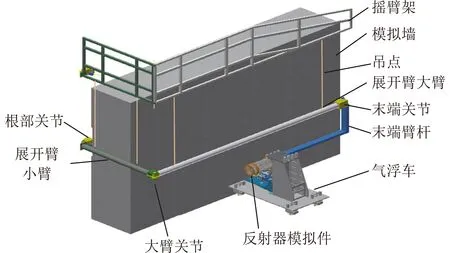
图1 试验系统总体示意图
悬吊装置为摇臂架组件,由四段绳索连接展开臂吊点与摇臂架,吊点靠近展开臂关节处,能够有效避免臂杆产生较大的柔性振动。当臂杆进行空间运动时,反射器模拟件通过臂杆的带动在智能跟随气浮车的气浮托盘上运动,且智能跟随气浮车上安装有位置传感器,能够对反射器模拟件的中心位置与车体位置进行监测,当反射器模拟件因跟随臂杆运动而与车体产生位置偏差时,传感器将偏差反馈至车体控制器以进行偏差补偿,从而达到智能跟随的目的,气浮车的轮部具有水平高度监测调节能力,能够保证车体在自流平地面上运动时车体水平倾角、水平高度保持不变。
整个展开过程分3个阶段,分别为臂间展开、根部展开以及末端展开。臂间展开过程中,大臂电机驱动大臂绕竖直方向旋转90°,此时气浮车对展开臂及负载实现水平跟随;根部展开过程中,大臂关节处锁定,根部电机带动展开臂及其负载绕竖直方向旋转160°,气浮车对展开臂及负载实现水平跟随;末端展开过程中,根部关节锁定,末端电机驱动末端臂杆及负载绕展开臂末端关节轴线方向转动180°,气浮车跟随负载进行水平运动以及竖直运动。展开过程如图2所示。
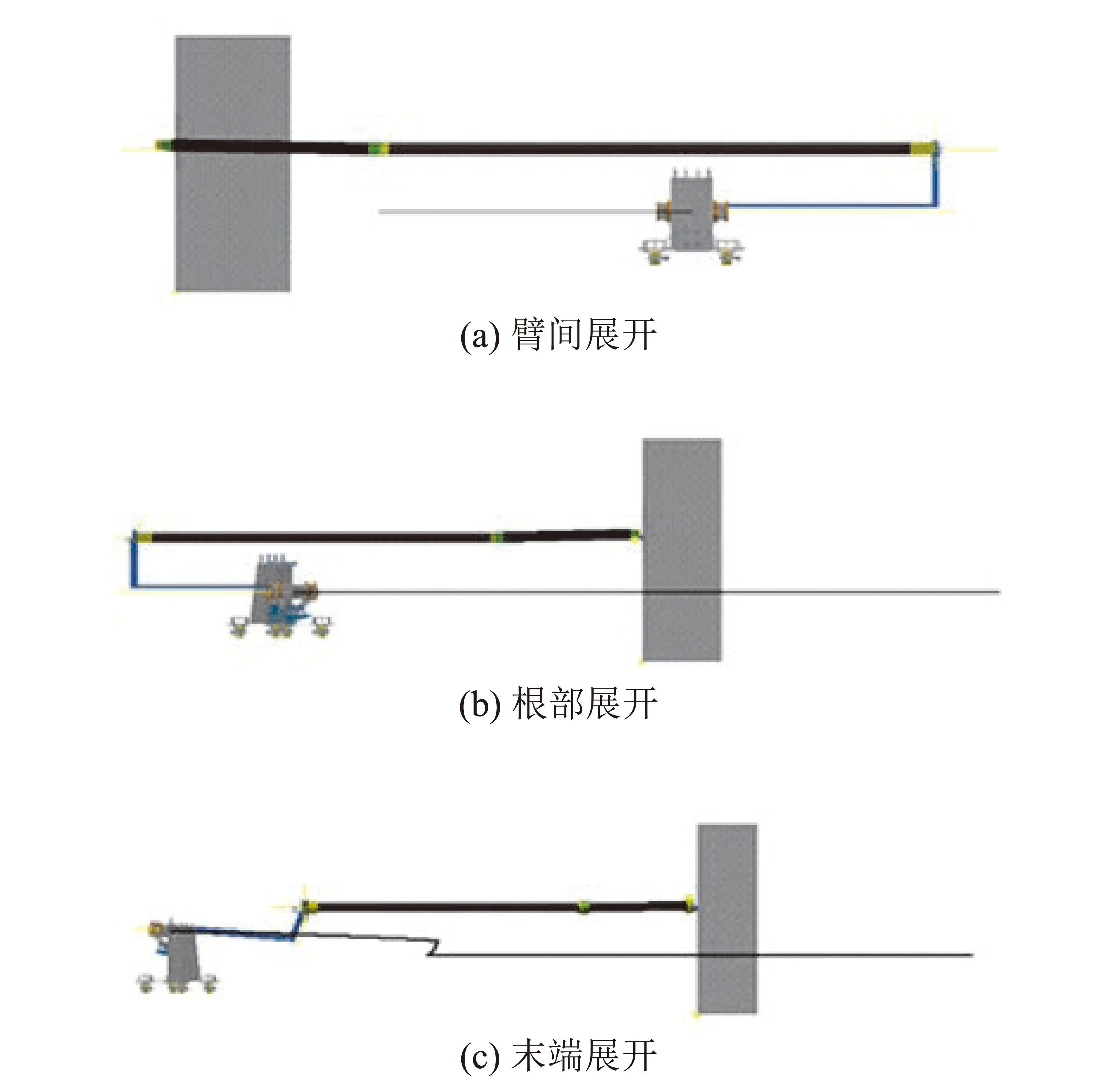
图2 展开过程示意图
大型空间展开臂质量80 kg,反射器模拟件质量209 kg,气浮车附加质量40 kg;在展开过程中,气浮车的卸载效率将会极大地影响关节处的附加阻力矩以及吊点位置的卸载效率,如何合理分配卸载效率是整套试验系统的关键所在。因此,需要对试验系统进行动力学建模与仿真,确定卸载效率分配方案。
1.3 系统多体动力学建模
1.3.1 刚体建模
在根部关节与模拟墙连接处建立惯性坐标系oxyz,如图3所示。定义刚体的质心位置固连局部坐标系为orxryrzr,如图4所示。
图3 惯性参考系
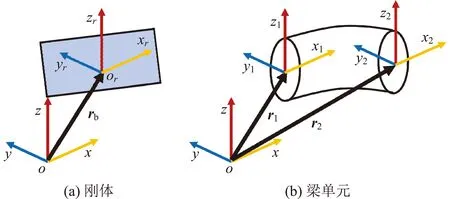
图4 建模单元
选择刚体的广义坐标为
(1)

(2)

(3)
(4)
则刚体的动能可表示为
(5)
其中质量矩阵Mr为
(6)
式中:mr为刚体质量;Jr为刚体在局部坐标系下的惯性矩阵,具体建模方法见文献[13]。
1.3.2 柔性体建模
考虑臂杆在空间的大尺度运动以及臂杆运动时产生的柔性振动,对臂杆进行柔性体建模。基于转动向量的两节点Timoshenko梁的广义坐标为
(7)
(8)

将式(8)求导,可得梁单元的动能为
(9)
式中:ρ,A和J分别对应梁单元的密度,截面面积以及截面惯性矩阵;矩阵H的形式与式(4)相同。梁单元的应变向量γ和曲率向量κ分别为
γ=ATr′
(10)
κ=HTφ′
(11)
式中:′表示对弧长的求导,矩阵A的形式与式(2)相同。则Timoshenko梁的弹性势能为
(12)
式中:CN和CM为线弹性本构关系,具体建模见文献[14]。
1.3.3 约束
系统中包含固定约束、平面约束和转动约束,如图5所示。分别建立这三类约束的方程为

图5 约束
(13)
(14)
(15)

1.3.4 系统动力学控制方程
完成系统中各个体的动力学建模后,利用第一类拉格朗日方程,将系统中的刚体、柔性体整合,可建立描述多体系统的微分代数方程(Differential-Algebraic Equations, DAEs)[15]:
(16)
式中:T和U表示对应系统的总动能和总势能;q是系统的广义坐标向量;Q是系统的广义外力向量,重力作为系统的广义外力;Φ为系统约束方程;λ为拉格朗日乘子向量。完成系统动力学方程建模后,采用向后差分方法高效求解[16]。
1.4 卸载效率指标分配
为简化模型,将气浮车未卸载重力部分作为臂杆所受外力,以气浮车卸载效率为系统输入,输入值分别为98%、99%、99.2%、99.4%、99.6%以及99.8%。
对系统进行仿真,结果表明:当气浮车卸载效率大于等于99.6%时,附加阻力矩以及各吊点卸载效率满足指标要求,当卸载效率为99.6%时,仿真结果见表1及表2。因此,在试验过程中,气浮车重力卸载效率应大于等于99.6%。
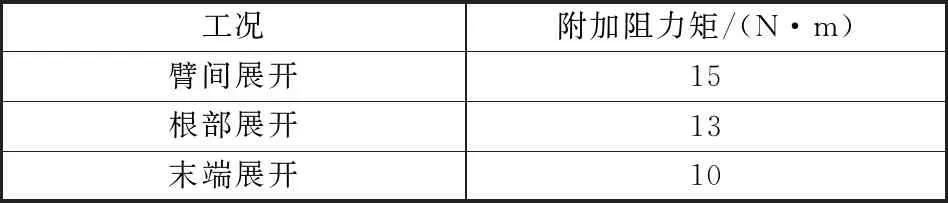
表1 展开过程附加阻力矩
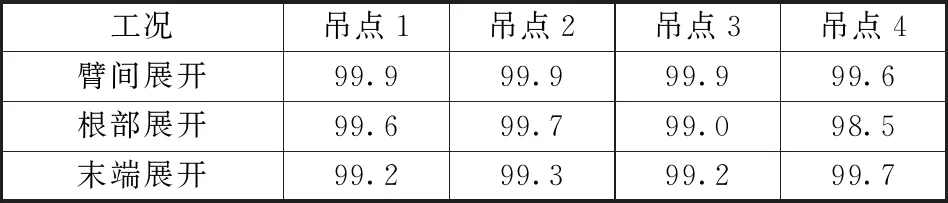
表2 展开过程卸载效率
2 地面微重力模拟试验
采用本文设计的试验系统对大型空间展开臂进行地面微重力模拟试验,试验设备如图6所示。

图6 地面微重力模拟试验系统
本次试验完成了对大型空间展开臂及反射器模拟件的六自由度展开轨迹模拟运动,试验过程中气浮车卸载效率为99.7%,附加阻力矩以及各吊点卸载效率试验结果见表3和表4。由结果可知:附加阻力矩以及各吊点卸载效率均满足要求,且优于设计指标。

表3 附加阻力矩试验结果

表4 卸载效率试验结果
3 结束语
本文针对大型空间展开臂多维空间运动的微重力模拟需求,设计了一种智能跟随气浮与悬吊相结合地面微重力模拟试验系统,利用摇臂悬吊机构和智能跟随气浮车分别实现了臂杆平面运动和末端执行器空间三维运动跟随和高精度动态重力卸载,该系统具有附加耦合作用小、卸载力稳定和卸载效率高的优点。对空间展开臂与地面微重力模拟装置构成的耦合系统进行了多体动力学仿真分析,实现了系统各卸载点卸载效率的合理分配。试验结果表明:本文提出的地面微重力试验系统,在臂展10.9 m、末端负载209 kg的工况下,实现了根部关节附加阻力矩小于16.54 N·m,满足了20 N·m的设计指标要求,成功解决了复杂多维运动下的高精度动态重力卸载问题,可为相关大型空间运动机构动态重力卸载提供有效、可靠的实验技术保障。