基于车路协同的十字路口行车方案仿真研究
2022-08-22孟振宇向郑涛
孟振宇,向郑涛
(湖北汽车工业学院电气与信息工程学院,湖北 十堰 442000)
1 引言
汽车作为重要交通工具,近年来数量激增。十字路口作为各向车流交汇处,常引发道路拥堵、事故频发等一系列问题。通过有效方法降低事故率和提高车辆通行效率已成为智能网联汽车研究领域的热点问题。
目前针对交通事故预警问题的主要研究方法有:通过传感器检测的传统方法和正在兴起的车联网技术。车联网技术通过车与车,车与路侧设施等之间通信,完成车速、位置、红绿灯信号状态等信息交互,达到缓解拥堵、避撞、节能减排的目的,利用车联网技术解决这些问题已然成为当前智能网联汽车研究领域的热点方向。基于车联网技术对事故预警问题研究的有:刘占文等[1]采用车联网技术,发布不同等级危险信息和控制信号灯状态实现路口事故预警。张玉婷[2]运用车联网中车路协同技术,获取车辆位置信息,经过两阶段预警过程实现闯红灯预警。基于传感器检测的传统方法对事故预警问题研究的有:杨艳芳[3]利用事故发生点附近传感器采集的交通事故数据为基础,分析交通流特性对事故的影响。Essam等[4]利用装置于车上的雷达、GPS传感器获取驶近交叉口和即将转向车辆的速度位置信息,计算车辆间碰撞概率进行事故预警。考虑到车载传感器受视野限制等因素影响,Minjin等[5]提出基于多传感器并融入无线通信的碰撞预警方法来预测车辆轨迹,在将要碰撞之前向驾驶员发送预警信息提醒其避撞。
针对紧急车辆在城市交叉口通行效率低的问题,龙文民等[6]用车路协同技术实时获取信号灯、车辆信息并建议紧急车辆以合理速度尽快通过交叉口。凌康杰等[7]利用射频和图像处理技术,计算紧急车辆最佳行车路径,减少通过交叉口时间。豆雪姗[8]运用车路协同技术,使紧急车辆发送优先通行请求让信号灯改变信号提高紧急车辆通行效率,并考虑以平滑方式恢复信号状态减少对社会车辆影响。Ali等[9]设计了紧急车辆在城市交叉口优先通行的智能交通系统,通过对紧急车辆有效引导和调控信号灯来提高行车效率。L Jiangchen等[10]利用V2X(Vehicle to Everything)通信技术使紧急车辆控制信号灯来减少通过交叉口时间,并采取距离补偿策略降低时延影响。
基于传感器检测的传统方法进行事故预警问题研究存在成本高、易受外界因素干扰、预警准确率低的特点,如:杨艳芳[3]取离事故点最近的下游传感器采集的离事故发生前很短部分数据进行事故风险预测,交通事故的发生是多种因素共同作用的结果,其采集的数据随机性较大不能准确预测事故的发生。Essam[4]等考虑转弯车辆和驶入路口车之间的碰撞,其使用的传感器在测量距离和方位角的误差超过0.1m和0.2°时,其系统精度显著下降而影响预测结果。Minjin[5]等加入多传感器进行事故预警,但在恶劣天气,如浓雾[11]及遮挡等因素影响下,摄像头难以捕捉清晰实时画面,造成预警准确率急剧下降。基于车联网技术的事故预警方法相比于传统方法能极大程度避免外界环境因素造成的影响,在较远距离获取其它车辆信息提前采取措施避免事故,具有准确率高、通信范围广、实时性强的特点且具有广阔的发展应用前景。目前大多数预警方法中主要关注存在冲突的车辆之间的避撞过程及措施,而忽略了紧急状况下非冲突正常车辆该采取何种行车策略来避免或减小碰撞风险[1-5]。真实交通环境中紧急状况下往往存在部分非冲突正常车辆,并非只存在冲突车辆,在紧急状况下考虑非冲突的正常车辆采取何种行车方案来减小事故风险是全方面考虑交通事故预警方案中重要一环。刘占文等[1]事故预警方案中存在冲突车辆时,交叉口信号灯变为全红灯阻止车辆驶入路口,但信号灯状态的突然改变将导致车辆紧急刹车造成追尾等事故;张玉婷[2]、杨艳芳[3]的交通事故预测方案中没有考虑紧急状况下正常车辆采取何种行车方式来进一步减小事故风险;Essam[4]等和Minjin[5]等同样忽略了紧急状况下其它正常车辆该采取何种行车措施来减小行车事故风险以确保行车安全。
针对上述方案中没有关注存在冲突车辆的紧急状况下其它非冲突正常车辆该采取何种行车方案减小事故风险的问题,本文基于车路协同技术设计出面向十字路口的事故预警方案和紧急车辆通行方案,在事故预警方案中充分考虑紧急状况下各方向驶入交叉口的正常车辆在收到危险信息后及时调整自身驾驶行为来进一步减小事故风险,完善事故预警方案体系。通过引入车联网中车路协同技术,使车辆间或车辆与路侧设施间通信车辆改变行车状态来达到降低事故率或提高紧急车辆通行效率的目的。最后,在搭建的基于Veins(Vehicles in Network Simulation)的双向耦合车路协同仿真平台上对上述事故预警方案和紧急车辆通行方案进行了验证。
2 基于车路协同的十字路口事故预警方案
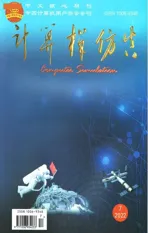
如图1是十字路口发生的典型交通事故。假设此时南北向信号灯为红灯,东西向为绿灯,车辆R越过停止线继续驶入路口与东西向车辆碰撞。
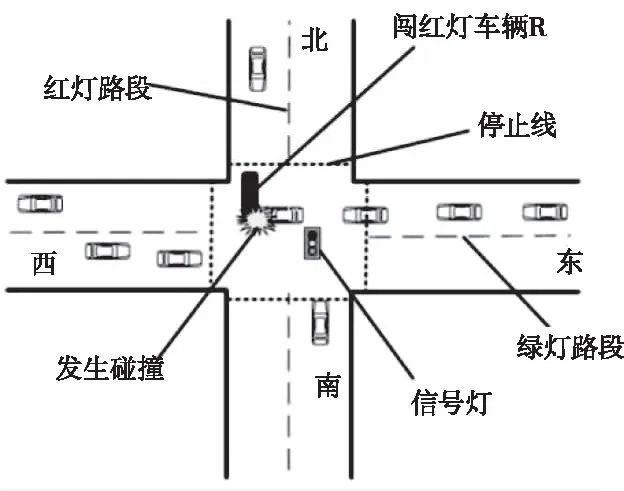
图1 十字路口处典型交通事故
车辆R闯红灯可能原因有:
1) 驶入路口前车辆R速度过高,刹车距离变长,无法及时安全停车;
2) 驾驶员受外界因素干扰,无法正常获取信号灯信息;
3) 驾驶员危险驾驶,如醉酒驾驶等。
2.1 事故预警场景及过程
本文搭建基于车路协同的十字路口事故预警场景如图2图所示。路口中心布置RSU(Roadside Unit,RSU)与信号灯,道路上车辆均配备OBU(Onboard Unit,OBU);RSU与OBU间通信基于专用短程通信技术(Dedicated Short Range Communications,DSRC)。DSRC的178号信道是传输控制和安全信息的专用信道,本文设定OBU与RSU间通信在178号信道上进行。车辆进入RSU通信范围后与其建立通信连接。

图2 基于车路协同的十字路口事故预警场景
被OBU判定危险驾驶的车辆本文称为危险车辆。
上述场景事故预警过程如下:
1) 车辆OBU实时采集车辆速度、位置信息并结合信号灯状态、车速和刹车距离等来判定车辆是否为危险车辆;
2) 车辆被判定为危险车辆后,OBU将发送判定信息至RSU;
3) RSU收到判定信息后,将广播危险预警信息至其它正常车辆;
4) 正常车辆收到危险预警信息后及时改变车辆运动避免事故。
2.2 十字路口危险车辆判定方法
RSU与停止线间距离固定,车辆与停止线距离可通过计算与RSU距离得到,OBU通过此距离变化趋势判断车辆是否在靠近路口。
当车辆靠近路口时,OBU根据车速、信号灯红灯状态、刹车距离等因素判断车辆是否为危险车辆。刹车距离计算方法如下[1]

(1)
式(1)中,Sbrake为刹车距离,v为车辆当前车速,g为重力加速度,μ为摩擦系数,treact为驾驶员反应时间。
如图,假设此时车辆A以低于限速的速度v0靠近路口,南北方向信号灯为红灯、东西向为绿灯。车辆A是否为危险车辆判断过程如下:
1)OBU计算出车辆A以速度v0刹车到完全停止的刹车距离Sbrake;
2)OBU计算出车辆A此刻与停止线距离SstopA;
3)OBU判断SstopA与Sbrake的大小关系,如图3,此时SstopA小于Sbrake,表明车辆A此时立即刹车也会闯入路口;OBU获取到车辆A行驶方向为红灯;综合以上条件判定车辆A为危险车辆。

图3 刹车距离与危险车辆判定的关系
2.3 紧急状况下路口处正常车辆行车方案
车辆被判定为危险车辆后,OBU将广播危险信息,本文称此场景为紧急状况;紧急状况下十字路口行车场景如图4。假设此时由北往南驶入一危险车辆D,并发布危险信息,S3为路口中心与停止线距离,圆形范围半径为S3,位于此范围内车辆被判定在路口当中,此时车辆A被判定处于路口当中。
紧急状况下路口处正常车辆行车方案:
如图4,正常车辆收到危险信息后根据自身位置、行驶方向及时调整驾驶行为避免事故:
1) 对车辆A而言,此刻正处于路口当中,则车辆A需加速来尽快驶离路口;
2) 位于路段E2、S2、W2、N2上正常车辆此时均驶离路口,不调整;
3) 位于路段E1、S1、W1、N1上正常车辆正在驶入路口,需减速避免驶入路口。

图4 紧急状况下的行车场景
3 基于车路协同的十字路口紧急车辆通行方案
图5为某时刻紧急车辆E自北往南即将通过交叉口,此时南北方向为红灯,东西向为绿灯,为使紧急车辆E快速通过路口,本文引入车路协同技术,使紧急车辆提前发送信息至信号灯让其改变信号状态。道路上车辆均配备OBU,OBU与信号灯间通信基于DSRC技术,并在DSRC频谱178号信道上进行数据传输。
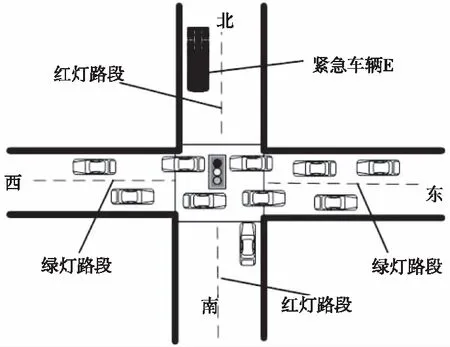
图5 紧急车辆通过路口场景
3.1 紧急车辆发送控灯请求策略
如图6,某时刻紧急车辆E以速度v1由北往南行驶,其OBU计算得到与停止线距离d1,假设此时东西向为绿灯,并获取到南北向红灯持续时间T,则紧急车辆E到达路口时间t为

(2)
若t小于T,表明紧急车辆E到达路口时,南北向为红灯,东西向为绿灯,则紧急车辆E发送信息至信号灯,请求其将东西向改为红灯,阻止其它车辆驶入路口,确保紧急车辆E顺利通过;
若t刚好满足大于T,表明紧急车辆E到达路口时,信号灯南北方向为绿灯,东西向为红灯,则不发送请求信息。

图6 紧急车辆到达路口时间与信号灯状态关系
4 基于Veins的车路协同仿真平台搭建
4.1 仿真平台选取
目前,网络仿真软件主要有NS2、NS3、OMNeT++等,交通仿真软件主要有VISSIM、SUMO等。SUMO中实现车辆运动模型和跟驰模型[11],能模拟各类交通参与者在交通环境下运动场景。Sommer等人[12]首次提出将网络仿真与交通仿真相融合的双向耦合思想并实现。
本文利用网络仿真器OMNeT++和交通仿真器SUMO构建的双向耦合车联网仿真平台Veins进行研究。Veins可在应用层对车联网环境中车辆编队、路径规划、信号灯配时等方面展开研究[13];还可研究交通场景下车辆间通信协议和车辆间通信对交通性能的影响[14]。Veins中自带建筑物遮挡造成的信号衰减阴影模型[11],可仿真本文中城市十字路口场景。
4.2 Veins仿真平台搭建
本文搭建的Veins车路协同仿真平台所用操作系统及各软件版本如表1所示。
表1 操作系统及软件版本汇总
5 基于车路协同的十字路口事故预警及紧急车辆通行方案仿真分析
5.1 仿真参数设置
本文场景中OBU、RSU均基于IEEE802.11p的DSRC技术进行通信。OMNeT++中的Veins模块已完成对IEEE802.11p底层通信模型的构建,可实现本文两种方案的模拟。具体网络仿真参数如表2所示。

表2 网络仿真参数设置
交通仿真场景十字路口四个方向路段长度为1000m,单向车道数为2,道路限速60km/h,道路车辆仅可直行和右转。两种方案仿真配置如下:
1) 事故预警方案实验共仿真4次,单次仿真时间6500秒。单次仿真中危险车辆为50辆,为研究危险车辆闯红灯场景,单独设置危险车辆由北向南行驶,且到达路口时为红灯;单次仿真中正常车辆共两种,其中正常车辆1速度为30km/h,数量为1000辆,正常车辆2速度为50km/h,数量为1000辆,均以一定时间间隔到达路口。
2) 紧急车辆通行方案实验共仿真2次,单次仿真时间1500秒。单次仿真中紧急车辆为10辆,为研究紧急车辆通过路口需避让路口中车辆的场景,单独设置紧急车辆由北向南行驶,且到达路口时为红灯;单次仿真中正常车辆共两种,正常车辆1速度为30km/h,数量为1000辆,正常车辆2速度为50km/h,数量为1000辆,均以一定时间间隔到达路口。具体交通仿真参数如表3。

表3 交通仿真参数设置
图7为本文搭建完成基于Veins的车路协同仿真平台界面。
图7 本文搭建基于Veins的车路协同仿真平台
5.2 仿真结果分析
5.2.1 基于车路协同的十字路口事故预警方案仿真结果分析
表4记录的是200辆危险车辆在应用方案前后碰撞次数及事故率。没应用事故预警方案时,4组实验共发生碰撞115起,事故率为57.5%;应用方案后,4组实验共发生碰撞20起,事故率为10%;实验结果表明,在采取了本文提出的事故预警方案后十字路口内事故率降低了47.5%。
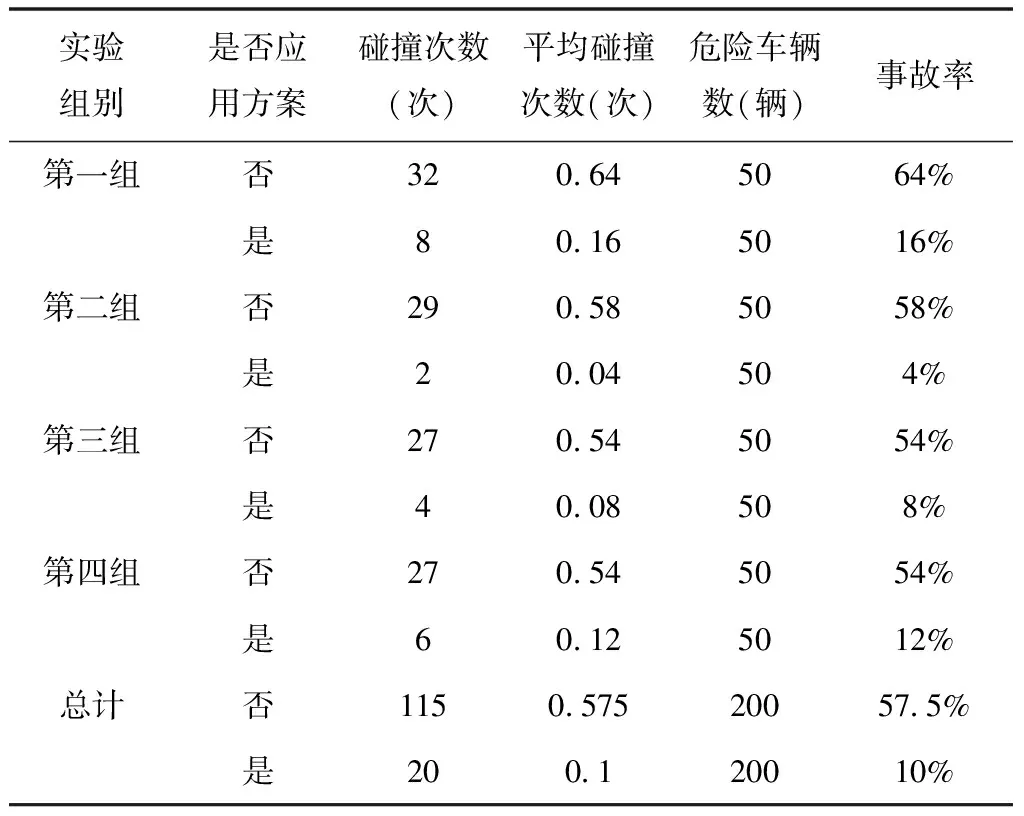
表4 应用事故预警方案前后碰撞发生次数、平均碰撞次数、事故率
应用方案后事故发生原因为:危险车辆距停止线很近时,南北向绿灯突然变红灯,此时广播危险信息较晚,正常车辆已驶入路口造成碰撞。
图8为没应用事故预警方案时SUMO中仿真场景。图8中(a)所示为东西向车流正在通过路口,此时危险车辆闯红灯驶入路口极有可能发生事故。图8中(b)为危险车辆驶入路口后与正常车辆发生碰撞。

图8 未应用事故预警方案SUMO-GUI仿真结果
图9所示为应用事故预警方案后SUMO中仿真场景。如图9中(a),由于应用了方案,危险车辆在闯红灯驶入路口前发布了危险信息,东西向正常车辆收到危险信息后提前采取减速措施没驶入路口。如图9中(b),危险车辆正在通过路口,无事故发生。
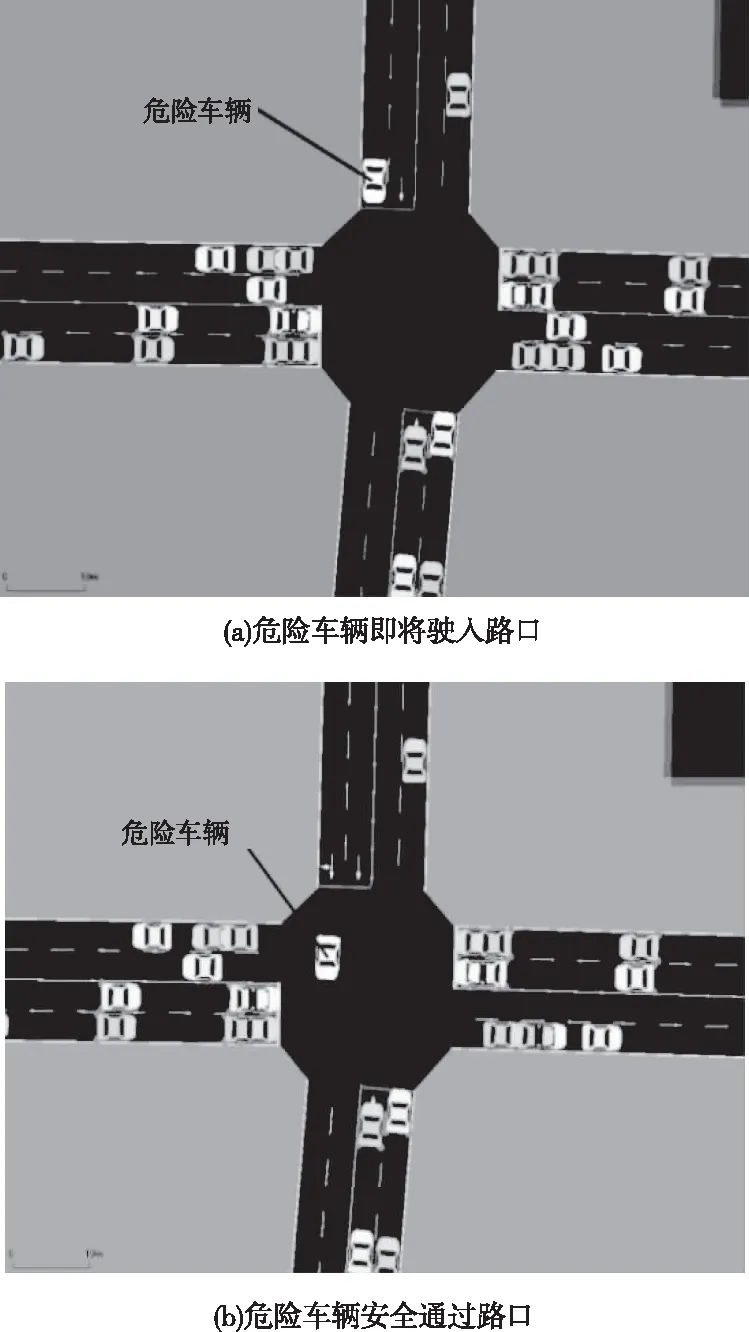
图9 应用事故预警方案后SUMO-GUI仿真结果
实验还记录了100秒到280秒应用事故预警方案前后部分驶入路口方向车辆速度变化图。如图10,当没有应用事故预警方案时,200秒后存在危险车辆时,驶入路口方向车辆速度没有改变。

图10 应用事故预警方案前驶入路口正常车辆速度变化图
图11为应用了事故预警方案后,在203秒驶入路口方向车辆收到危险信息,采取减速操作避免事故。
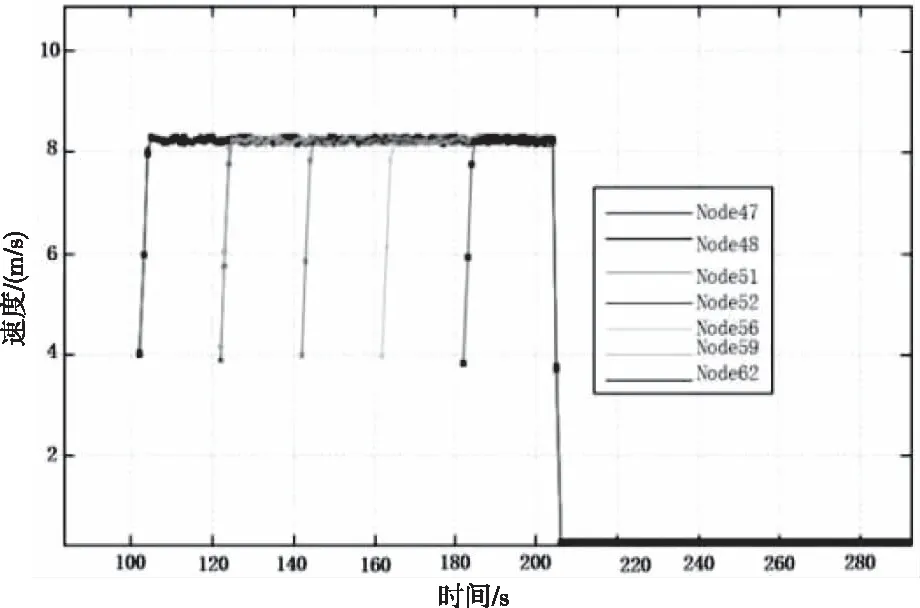
图11 应用事故预警方案后驶入路口正常车辆速度变化图
5.2.2 基于车路协同的十字路口紧急车辆通行方案仿真结果分析
表5为应用十字路口紧急车辆通行方案前后,统计紧急车辆通过路口总时间、总停车次数、平均时间、平均停车次数。
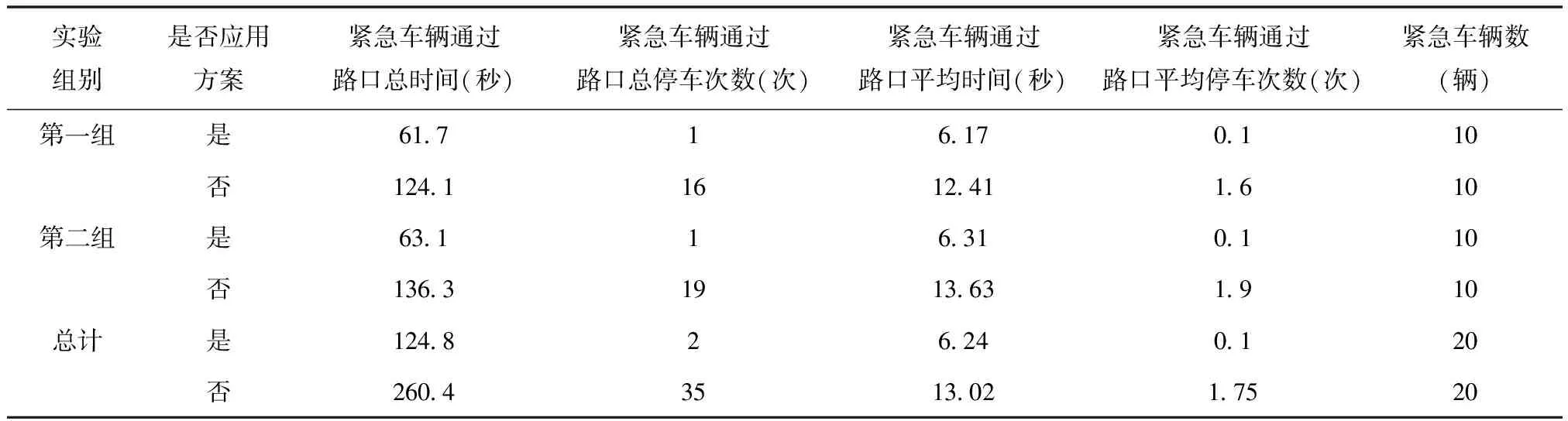
表5 应用方案前后紧急车辆通过路口总时间、总停车次数、平均时间、平均停车次数
没应用方案时,20辆紧急车辆通过路口总时间260.4秒、平均时间13.02秒,总停车次数35次、平均停车次数1.75次。
应用方案后,20辆紧急车辆通过路口总时间124.8秒、平均时间6.24秒;总停车次数2次、平均停车次数0.1次;从仿真结果可看出应用方案后,紧急车辆通过路口平均时间、平均停车次数比未采取方案时分别降低了6.78秒、1.65次。
根据仿真结果,应用方案后,紧急车辆通过路口平均时间、平均停车次数比在未采取方案时分别降低了52%、92%以上。因此,本文提出的方案能有效提高紧急车辆在十字路口的通行效率。
图12为未应用十字路口紧急车辆通行方案时SUMO中仿真场景。如图12中(a),此时信号灯南北向为红灯,东西向为绿灯,东西向车流正通过路口,消防车即将驶入路口。图12中(b)为紧急车辆驶入路口后正停车避让东西向车流,这将耗费通过路口时间,降低通行效率。

图12 未应用十字路口紧急车辆通行方案SUMO-GUI仿真结果
如图13为应用十字路口紧急车辆通行方案后SUMO中仿真场景。如图13中(a),为保证尽快通过路口,消防车提前发送信息至信号灯请求其将东西向信号灯改为红灯,阻止车辆驶入路口,确保路口通畅。如图13中(b),此时消防车正顺利通过路口,大幅降低避让车辆时间,提高了通行效率。
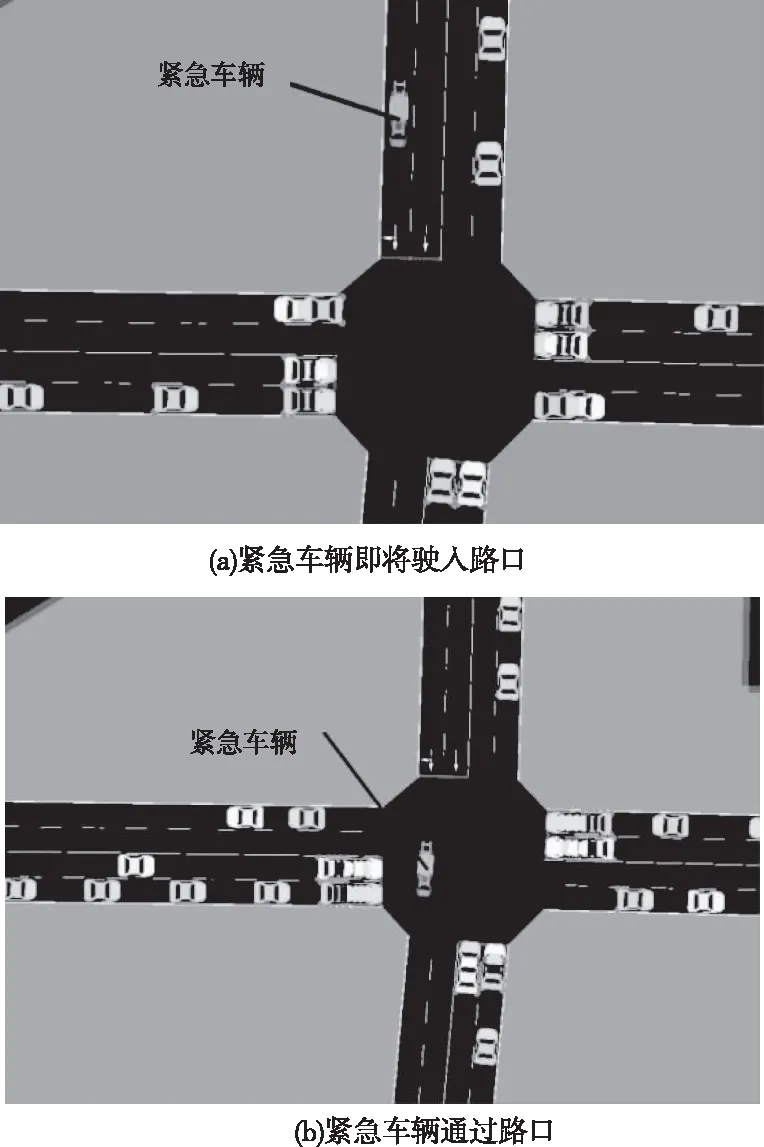
图13 应用十字路口紧急车辆通行方案后SUMO-GUI仿真结果
图14是统计应用十字路口紧急车辆通行方案前后,每辆紧急车辆通过路口时间。
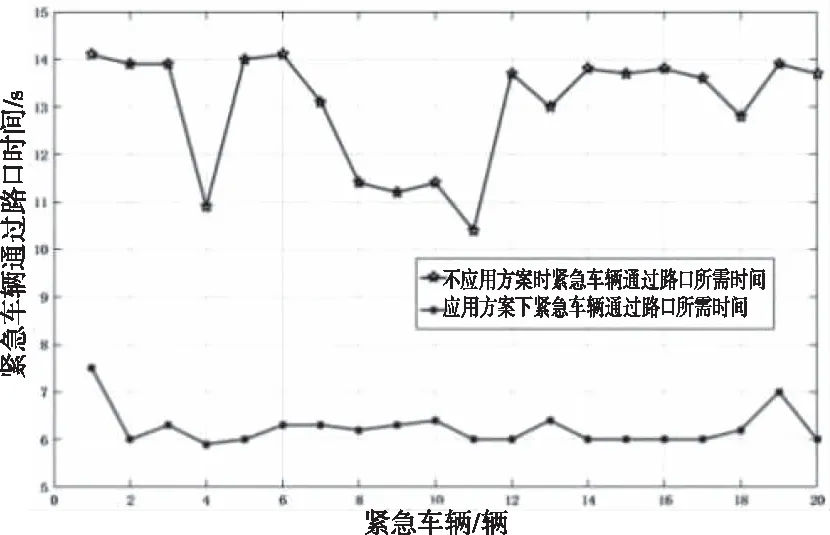
图14 应用方案前后每辆紧急车辆通过路口所需时间
如图14,不应用方案时,第4、11辆紧急车辆通过路口时间明显变短,因为此时路口内车辆较少,避让车流时间减少,故时间较短。
如图14,应用方案后,第1、第19辆紧急车辆通过路口时间略长,因为紧急车辆到达路口后需避让少数在红灯亮起前驶入路口内的车辆,导致时间增加。
图15为记录应用十字路口紧急车辆通行方案前后,每辆紧急车辆通过路口的停车次数。应用方案后,第1、第19辆紧急车辆停车次数为1,这是避让红灯亮起前驶入路口内车辆导致的停车,这与图14中应用方案后,第1、第19辆紧急车辆通过路口时间较长相符。

图15 应用方案前后每辆紧急车辆通过路口停车次数
6 结语
针对城市路网十字路口处事故频发、紧急车辆通行效率低的问题,基于车路协同技术提出了一种面向十字路口的事故预警方案和十字路口紧急车辆通行方案。在基于Veins的双向耦合车联网仿真平台上对两种方案进行仿真测试,验证了方案的有效性。通过交叉口处RSU与OBU信息交互,影响车辆运动状态,达到事故预警和提高紧急车辆通行效率的目的。未来工作中,将融入更复杂交通信息,如路口车辆节点密度、驾驶员行为特性,以实现对车辆更精准控制,并考虑刹车因素对车辆运动的影响,来进一步降低路口事故率和提高紧急车辆通行效率。