基于双目视觉的测距系统研究
2022-08-20王浩张善房朱建高张凤生
王浩 张善房 朱建高 张凤生
1. 海信家电集团股份有限公司 山东青岛 266000;
2. 青岛大学 山东青岛 266000
0 引言
目前非接触式测距方法中,利用超声波、红外、激光等进行测量的方式较为普遍,超声波方式成本高、精度较低,红外方式测量范围小,激光方式测量精度高、成本高[1][2]。随着图像技术的发展,双目视觉测距法展现出速度快、柔性好等优点,具有较大潜力。同时,以双目视觉测距为基础,通过调整测量系统的参数,可以实现测量范围的改变,通过改变不同的图像处理算法实现不同的功能,同时搭载不同的语言控制系统,可将双目视觉技术应用到机械臂、智慧家居、智能制造等领域,前景广阔[3]。
基于视差原理分析[4]、相机成像模型分析,设计双目测距系统,并推导测距算法及计算公式。进一步对相机畸变模型、相机标定、图像处理及图像特征点匹配方法进行研究,最终将理论应用到实际,根据设计原理,基于两个CCD相机搭建双目视觉测距系统实体[5],对测距系统实体采用张正友标定法进行相机标定[6][7],并进一步对系统进行标定,得到系统的固有参数。基于系统固有参数,通过设计的系统采集被测对象的图片,并对左右相机采集的对应图片进行图像处理及特征匹配,得到被测对象相对相机的位置,最终实现测距[8][9]目的。
1 双目视觉测距原理
图1所示为双目视觉测距原理图。C1、C2为两个标称参数一致的CCD相机,f1、f2分别为左、右相机镜头焦距,α1、α2分别为左、右相机光轴倾角,理论上应有f1=f2、α1=α2。2L为左右相机像平面中心之间的距离。为测量被测对象位置,需建立如下坐标系:(1)测量系统坐标系xoz:原点为两相机像平面中心o1o2连线的中心,o1o2连线为x轴,方向o1指向o2为正;z轴垂直于o1o2连线,向上为正;(2)相机坐标系:分别以两个CCD相机像平面中心o1和o2为原点在两个CCD上建立x1o1z1和x2o2z2坐标系[10]。

图1 双目视觉测距系统示意图
设点P为待测点位置,其在xoz坐标系中的坐标为(x,z);在两相机各自成像平面上的坐标为P’(x1,0)和P’’(x2,0)。由几何光学成像原理得出:
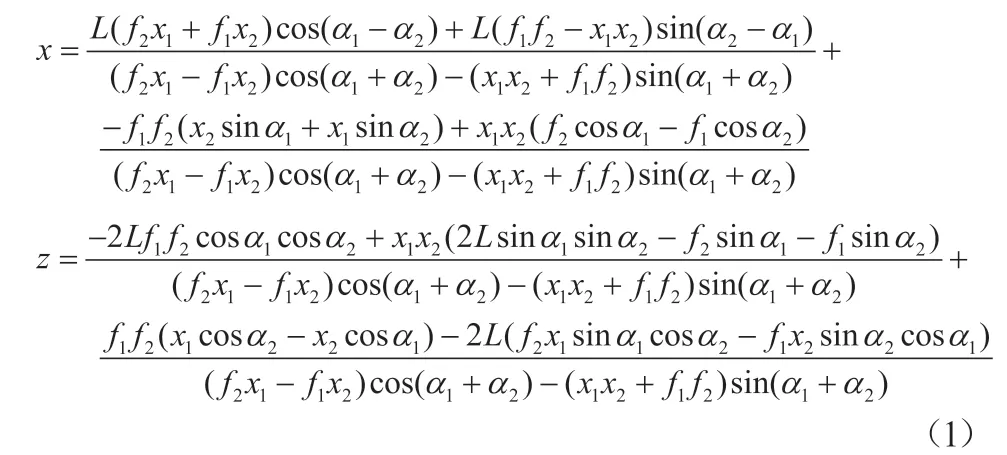
可见,P点坐标(x,z)取决于x1、x2、f1、f2、α1、α2和L这7个参数,任一值的误差均会影响测量结果。
x1、x2是通过实际测量得出,但相机采集的图像会存在畸变,影响测量精度,需要通过相机标定得到相机本身畸变系数后进行图像畸变矫正,提高测量精度;其余5个参数为系统本身固定参数,但由于固定参数的理论值与实际值难以完全一致,需要对系统进行标定,得到系统固定参数的实际值,减小测量误差,提高测量精度。
2 图像匹配
图像匹配可以建立左右相机采集到的两图像之间位置对应关系,进一步便可得到视差。图像匹配主要有三种方式:相位匹配、灰度匹配、特征匹配。
相位匹配是基于对应点相位相等,利用空间域平移与频率域相位平移的对应关系进行匹配,但会存在相位卷绕及相位奇点的问题,此方法主要处理带通滤波信号的相位信息;灰度匹配受图像灰度信息影响较大,抗造性差、误差大;特征匹配利用图像上的点、线等特征信息,不直接依赖灰度信息,具有鲁棒性好、速度快、精度高的优点,因此本文采用特征匹配的方式进行图像匹配[10]。
常用的特征点有Harris角点、FAST特征点、SURF特征点。SURF特征点检测精度和稳定性高于Harris角点和FAST特征点,但速度慢于FAST特征点检测,效率问题通过计算机设备可以得到保障,故最终选择SURF特征点检测[10]。
基于SURF特征点的图像匹配主要有两种:BruteForceMatcher(暴力匹配法)、FlannBasedMatcher(快速最近邻逼近搜索法)。BruteForceMatcher法精度高、效率低,通过目前计算机设备可以弥补效率低的缺点,因此选择BruteForceMatcher法进行SURF特征匹配。但是在匹配过程中,由于环境因素影响,往往会存在一些误匹配现象,干扰因素越多,匹配情况越差,如图2 a)所示。因此需要采取去除误匹配措施。
目前主要有两种去除SURF特征点误匹配方法:基于RANSAC法特征匹配、基于极线约束法特征匹配。基于RANSAC法特征匹配利用迭代比对方式求解最优模型,该方式精度高,但匹配对数量少,如图2 b)所示,并且一定情况下还会出现匹配不成功的情况。基于极线约束法特征匹配,其原理为:右成像平面上一点在左成像平面的对应匹配点必定位于左成像平面的极线上。此方法将求解范围由二维降低至一维,提高了效率,匹配对数量多,但仍然有较少误匹配点对,如图2 c)所示。本文提出首先通过基于极线约束法进行一次匹配,去除绝大部分杂点、误匹配点,后在此基础上进行基于RANSAC法的特征匹配,由于首先进行了一次基于极线约束法的特征匹配,为后续RANSAC法的特征匹配提供了一个干扰小、杂点少的环境,最终结果表现为匹配精度高、匹配点多的良好效果,如图2 d)所示。

图2 不同SURF特征匹配方法效果对比图
3 双目视觉测距系统搭建及标定
根据双目测距系统原理,搭建双目测距平台,如图3所示。相机型号为FC-IU320C-6,像元大小3.2 μm×3.2 μm,分辨率为2048×1536,焦距f=25 mm,设置两个相机各自的光轴倾角6.703°。底座为自制槽钢,尺寸为100 mm×48 mm×5.3 mm,槽钢两端装配有两个可调节云台,通过调节云台,设定系统参数2L为1375 mm。自制8×6格数的棋盘格,每格大小为80 mm×80 mm。

图3 双目测距系统组成装置图
采集19对不同方位下棋盘格标定板的图像进行双目测距系统标定,标定程序为基于Visual Studio 2015,利用C++语言自主设计开发,标定程序界面及标定结果如图4所示。
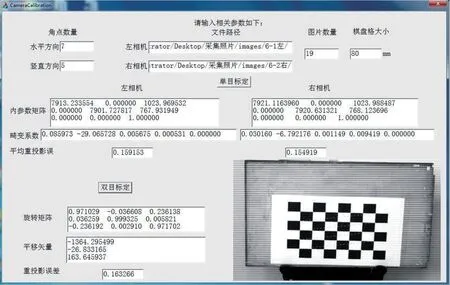
图4 相机标定程序界面
根据标定结果计算得f1=7913.234×3.2×10-3≈25.3223 mm,f2=7921.116×3.2×10-3≈25.3476 mm,畸变系数不为零,说明存在畸变,需要矫正畸变。一般平均重投影误差小于0.2个像素即可认为标定结果良好,两相机该值均小于0.2,说明相机标定结果良好[10]。
根据双目标定结果可求解左相机光轴倾角α1=6.8399°,两相机主点距离为2L=1374.07 mm,右相机光轴倾角α2=6.8228°,此结果与实验前设定的两个相机各自的光轴倾角6.703°和两相机主点距离1375 mm非常接近,同时得到的重投影误差小于0.2,说明双目标定结果良好[10][11]。
4 双目测距实验及结果评价
基于标定结果进行测距系统的测距实验,选取一段管路(没有棱角、特较不明显、对系统检测能力要求更高)作为被测对象进行测量实验,如图5所示。管路固定于工作台,可实现调整x(代表左右方向,下同)、z(代表前后方向,下同)方向的位移,调整精度为0.01 mm。

图5 测量实验场景图
在有效测量范围内选取了9个待测点,如图6所示。基于xoz坐标系,待测点1~9右侧与下方数值为待测点位置设定值,通过德国BOSCH公司激光测距仪设定,测距仪型号为DLE40,精度1 mm(注:理论上设定值也会存在一定误差,限于实验条件,未考虑该误差)。待测点基本涵盖有效测量范围区域。在这9个待测点处均以如下方式进行图像采集:以待测点为中心,沿z轴方向前、后各移动10次,每次移动1 mm且采集一对图像;同理以待测点为中心沿x轴向左、右方向各移动6次进行图像采集。
按照上述移动方式,下面以待测点5为例,对测量过程进行说明:
由图6知,待测点5位置为(5693, -22),单位:mm,负号表示待测点5位于x轴负半轴。
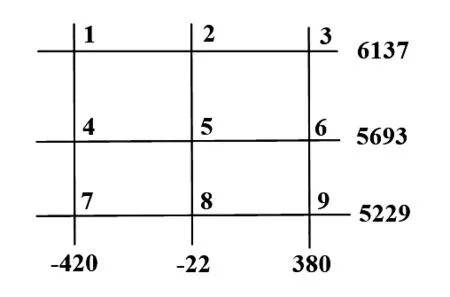
图6 待测点位置关系图
(1)图像预处理
首先对采集的图像进行降噪,后进行图像畸变矫正。
(2)图像匹配
将两幅对应图像通过RANSAC法与极线约束法结合的方式进行SURF特征匹配:首先在左图选取ROI,其左上边角坐标为(911, 308),此为起始坐标。以一对匹配点为例:
首先求解匹配点对像素坐标。左匹配点在ROI图上坐标为(87.274, 114.004),由上可知该点的起始坐标为(911, 308),因此该点的实际坐标为两坐标相加为(998.274, 422.004);右匹配点可直接得出坐标为(984.347, 424.048)。
已知像素坐标,进一步求解物理坐标x1、x2。由于物理坐标位于相机像平面的中点,故由相机标定结果得知左相机物理坐标原点为(1023.970, 767.932),右相机物理坐标系原点为(1023.988, 768.124),因此,计算x1为:

同理,计算x2为:

将所有参数带入公式(1)可得x为-22.86639 mm,z为5693.77632 mm,十分接近设定值(5693,-22)。以此方式按照在待测点5处前后、左右移动的方案进行测量,由实验结果得到,待测点5所处区域,z最大测量误差为3.091 mm,x最大测量误差为0.962 mm。同理,按照同样方式在其余待测点位置区域进行实验,得到所有待测点所处区域对于z值和x值的最大测量误差,如表1所示。进一步,将前后方向和左右方向的最大测量误差绘制成如图7所示误差图,可直观反映前后方向和左右方向的测量精度情况。

图7 各个位置z、x最大测量误差图
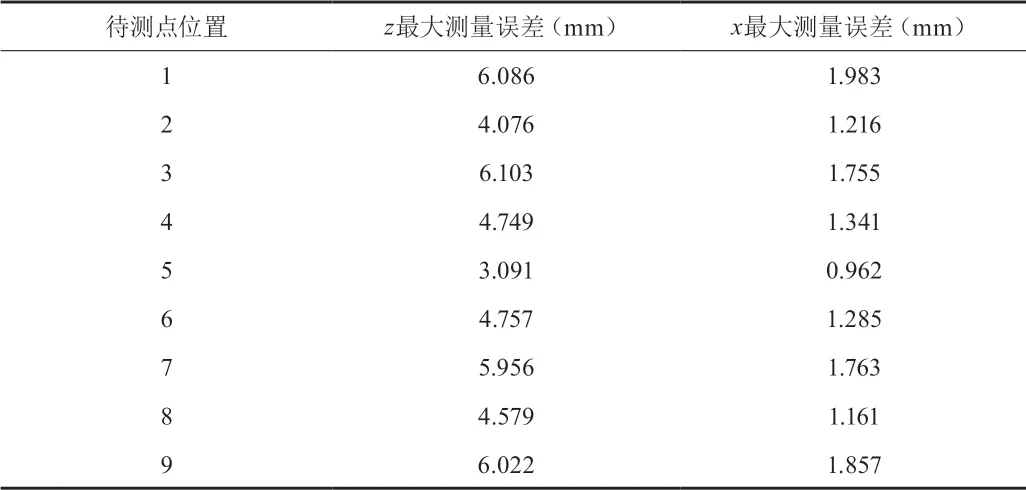
表1 各待测点位置测量实验的最大测量误差
根据实验结果,有如下结论:
(1)在有效测量区域内,双目测距系统对前后方向z的测量误差为±6.103 mm,左右方向x的测量误差为±1.983 mm。
(2)在有效测量区域内,边角处测量误差最大(即待测点1、3、7、9所处区域),中心位置区域测量误差最小(即待测点5所处区域),中心位置区域z测量误差为±3.091 mm,x测量误差为±0.962 mm。
(3)在测量分辨力方面,系统对左右方向x的测量能力优于对前后方向z的测量能力。
5 结论
通过研究双目测距原理,设计了双目测距系统,以Visual Studio 2015为开发平台,基于C++语言、OpenCV3.2.0函数库编制测距系统程序,进行图像采集、相机标定、图像处理、图像匹配,最后进行实验验证。实验结果表明,双目测距系统具有良好的精度和可行性,下一步将继续深入研究、分析、完善此双目测距系统的测量精度及可靠性,开展双目系统应用到相关智能制造设备和智能化场景的研究。
