基于陀螺减摇装置的船舶横摇减摇研究
2022-08-20夏召丹汤雅敏张杰杰范佘明
刘 义 夏召丹 汤雅敏 张杰杰 范佘明
(1. 上海市船舶工程重点实验室 中国船舶及海洋工程设计研究院 上海 200011;2. 喷水推进技术重点实验室 上海200240)
0 引 言
船舶减摇是为了防止对货物的损坏,使船员能够有效地工作,并为乘客提供舒适的乘船环境。为了实现船舶减摇,可以使用闭环反馈控制系统(主动控制)或仅依靠开环镇定系统(被动控制) 来响应扰动。船舶减摇的方法有很多种,比如陀螺减摇、鳍减摇、舵减摇、舭龙骨减摇、水仓减摇和移动重物减摇等。减摇装置可分为外部运动控制系统和内部控制系统2类:外部运动控制系统在船体外产生力和力矩,通常依赖于水动力的相互作用,例如鳍减摇、舵减摇和舭龙骨减摇等;内部运动控制系统是在整个刚体中产生力和力矩,以便抵抗横摇运动力矩,例如水舱减摇和移动重物减摇等。减摇系统概述见表1。可以看出,外部运动控制系统的主要缺点是它们在船舶低速下会失效。对于船舶低速或零速状态,内部运动控制设备如陀螺仪可被使用。

表1 减摇系统概述
陀螺仪减摇装置(陀螺稳定器),利用其高速转子输出稳定动量矩,以1个较小的进动力矩,可获得放大的输出力矩来抑制船舶横摇。
采用陀螺减摇器的设想有较长历史:在非海洋应用背景下,第1次提出陀螺稳定器是应用于奔驰汽车。SCHILOVSKI设计了第1个实尺度应用到汽车的陀螺稳定器。最近,陀螺稳定器也被用于航天领域,包括在外太空航行的飞行器(如卫星),使用单万向节控制力矩陀螺(CMGs)或变速控制力矩陀螺,以提供结构振动的阻尼和曲率控制。此外,陀螺稳定器也已应用于两轮车[和自主水下航行器(AUV)。在水面船应用背景上:SCHLICK在1904年提出了1种应用水面船的被动陀螺控制装置,它由1个电动机和 1个制动器来控制陀螺仪的进动。在这种布置中,进动速度与船的横摇率成正比。随后,BRENNAN和THOMAS也提出了用于水面船的被动陀螺稳定器。1908年,SPERRY首次提出了海洋环境中模型尺度的主动控制陀螺稳定,第1个全尺寸主动陀螺稳定器在1912年进行的海试后安装在美国Worden号船上。之后,主动陀螺稳定器被安装在大约40艘舰船上,其中大多数安装在游艇上。安装了主动陀螺仪的最大船只是Conte Di Savoia(1932-1950),1艘排水量为4 700 t的意大利豪华客轮,这种装置的减摇率可以达到60%。
近些年,随着使用改进的轴承材料和性能更高的电机,以及使用更小的陀螺减摇装置来产生转动力矩,减摇效率大幅度提升。例如:Kisaka海洋有限公司和三菱重工开发了新的被动陀螺稳定系统,并应用到法拉利定制系列游艇中,长度从83~128 ft(1 ft≈0.31m)不等。中国减摇装置公司也相继研制了一系列主动陀螺稳定器。采用先进的陀螺减摇技术几乎可以消除船舶的摇摆,最大化实现船舶稳定。
本文的目的是建立结合船舶横摇运动下的陀螺减摇动力学模型,探讨陀螺仪在船舶横摇减摇的应用效果。利用MATLAB Simulink软件开发了由船舶与陀螺减摇装置联合动力学模型组成的控制仿真程序。通过仿真,分析使用陀螺减摇装置对船舶在不规则波中的减摇效果,并对自然进动陀螺减摇装置和主动控制进动陀螺减摇装置的减摇效果进行了对比。
1 数学模型
1.1 陀螺减摇装置
陀螺减摇装置可分为被动和主动陀螺稳定器 2种。被动陀螺稳定器是自然进动式,主动陀螺稳定器是控制器驱动进动式。控制器驱动的旋进运动陀螺稳定器是通过在自然进动式陀螺稳定器上增加1个数字控制电机来实现的。控制器驱动的陀螺稳定器通过主动控制进动力矩,可提供更精确的稳定性能。图1为2种方式的陀螺稳定器示意图。

图1 2种方式的陀螺稳定器示意图
仅使用1个陀螺稳定器来产生横摇运动抵消扭矩存在一些问题。当飞轮绕进动轴旋转时,陀螺万向节轴的方向会随之改变,导致陀螺稳定器输出转矩的方向发生变化,从而产生不需要的转矩,可能导致船舶发生不必要的偏航或俯仰运动。针对这一问题,工程上通常采用如图2所示的方法,即2个陀螺减摇装置为1个工作组,转子转速大小相等方向相反,转子进动大小相等,方向相反。这确保了所有在不希望的方向上产生的扭矩将相互抵消。

图2 双陀螺仪稳定器的总体布置
1.2 单陀螺减摇装置动力学模型
在建立动力学模型之前,要先建立坐标系,如下页图3所示。设单框架控制力矩陀螺的载体坐标系或称为基座坐标系-,点为坐标原点。一旦陀螺减摇稳定器安装在船上,则船舶便成为陀螺稳定器的基座。基座坐标系-绕轴转动角度为框架坐标系-。框架坐标系-绕轴转动角度为转子坐标系-xyz。轴即为转子转轴,坐标系-作为不参与转子自转的主轴坐标系。陀螺稳定器相对于框架坐标系-的运动方程线性化表达为:

图3 陀螺仪坐标系示意图

式中:M、M和M为绕相应轴的陀螺力矩,N·m;ω为陀螺仪轮子转速,r/s;为进动角,rad;为绕轴惯性矩,kg·m;I为陀螺稳定器的极惯性矩,kg·m;为基座相对于轴运动的角度,即船舶的横摇角,rad。
1.3 双陀螺稳定器的船舶和陀螺联合动力学模型
建立船舶在波浪中的非线性横摇运动模型,并忽略船舶纵摇、首摇运动以及横荡、纵荡、垂荡运动对船舶横摇的耦合效应:

式中:参数为船舶的横向惯性矩;为附 加 质 量 惯 性 矩,kg·m;为 横 摇 阻 尼,kg·m·s;为横摇恢复力矩,N·m;源项τ是波浪产生的横摇力矩,N·m。
结合公式(1)和公式(2),双陀螺稳定器的船舶和陀螺联合动力学模型为:

式中:I为陀螺稳定器的极惯性矩,kg·m;I为横向惯性矩,kg·m;B为陀螺阻尼,kg·m·s;C为陀螺恢复力矩,N·m;ω为转动速度,r/s;源项τ是陀螺稳定器产生的控制力矩,N·m;对于双陀螺稳定器2,K=Iω为陀螺减摇装置在自转轴产生的角动量,kg·m·s。
如果陀螺仪的进动角幅值||较小,式(3)可进一步线性化,并采用状态空间形式表示:


建立双陀螺稳定器的船舶和陀螺联合动力学模型后,设计一个基于横摇角反馈的陀螺稳定器PD进动控制器:

式中:K代表比例控制器系数;K代表微分控制器系数。
1.4 波浪力模型
本文中波浪干扰作用的建模方法采用线性状态空间模型。控制系统中采用这种方式,主要是用于测试系统鲁棒性和闭环控制系统性能分析,并不是真实船舶实时受到的波浪力。
在计算不规则波浪力和不规则波浪作用下的船舶运动响应之前,要确定波浪谱()。本文采用Torsethaugen波浪谱来模拟不规则波工况。在这个模型中,根据最高谱峰的来源,将海况分为2种类型,频谱有1个峰或2个峰,根据峰值周期T的值而定。风主导(非充分发展的波浪)和涌浪主导(充分发展的波浪)的海况区别由T值定义:

如果T<T,为风主导海况;如果T>T,主谱峰对应涌浪主导海况系统;如果T的值在T附近,则会产生2个谱峰。
根据2个谱的作用大小,计算Torsethaugen谱如下:
=1是主峰系统,=2是次峰系统。具体参数定义可参照TORSETHAUGEN发表的论文。其中,波浪相应模型的具体计算流程见图4。

图4 波浪响应模型流程
将RAO与线性船舶运动方程合起来近似表示为可调增益≈()H():其中()是波幅到波浪诱导力转换的传递函数,H()是力到位移转换的传递函数,具体处理时增益调节以最终位移()()在实际可接受范围内为标准,()是高斯白噪声,()是波浪谱拟合传递函数。拟合波浪谱函数的二阶有阻尼传递函数()如下:

式中:是阻尼系数;是波浪的主频率,s,即峰值频率;是表示波能的常数。
将公式(7)转化成状态方程形式:

式中:x状态方程,x是x的一阶导数;y是输出;是零均值白噪声;A是状态矩阵;B是控制矩阵;c是观测矩阵。
2 仿真结果和讨论
2.1 Simulink框图
基于第1章节介绍的数学模型,构建了如图5所示的陀螺稳定器和船体模型的Matlab Simulink框图。

图5 船舶及陀螺减摇的Simulink框图
2.2 研究对象
本文以某船为研究对象,外形示意图如图6所示,采用裸船体结构,排除了船体舭龙骨、舵和其他附件等干扰因素。

图6 船舶示意图
该船船长24.429 m、型宽 5.636 m、排水量70.5 t。陀螺仪的额定转速 5 500 r/min、直径 1.16 m、质量950 kg。选择陀螺仪的尺度要和船舶尺度相匹配一般来说,陀螺仪质量占船舶质量的 1% 左右,效果匹配最好。系统相关参数如表 2 所示。

表2 参数值表
2.3 结果分析
为了分析不规则波浪下船体横摇运动,先要确定在某海况下,传递函数()相应的系数。本文采用的不规则海况为有义波高2.5 m,峰值频率=0.73。选取=0.257 ,=0.875 2,谱峰函数和传递函数下的伯德图对应见图7。
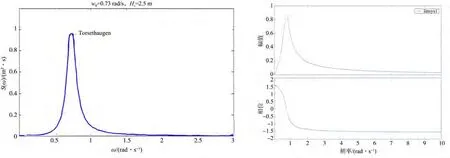
图7 Torsethaugen 波浪谱函数(左图)和线性状态空间模型的伯德图(右图)
由图可见,采用的线性状态空间模型的谱峰值以及谱峰值对应的频率值与波浪谱函数基本一致,即选取的值可以基本模拟谱函数。
基于输入参数和数学模型,下页图8给出了不加陀螺稳定器、被动陀螺稳定器和主动陀螺稳定器3种情况下的船舶横摇时历及相应的进动角变化。

图8 船舶横摇响应与进动角响应
由图可见,陀螺减摇装置工作后的,其最大横摇角从14°降到8.8°,加主动控制以后,最大横摇角进一步降到2.2°;不加陀螺稳定器的横摇标准偏差为5.3°,被动和主动陀螺减摇以后横摇标准偏差分别为2.8°和0.8°。此外,在仿真时间380 s附近,自然驱动的陀螺稳定器反而放大了船体的横摇振幅。
为了定量分析减摇效果,定义减摇率为()/100%。式中:为减摇装置不工作时的船舶横摇标准偏差,为减摇后的船舶横摇标准偏差; 可计算得到在有义波高为2.5 m时,被动减摇装置和主动式减摇的减摇率分别为47%和84%。由此可见,设计的陀螺仪对船舶的非线性横摇有较好的抑制效果。
3 结 语
本文建立了双陀螺稳定器的船舶和陀螺联合动力学模型及基于Torsethaugen波谱的不规则波扰动模型,设计了自然驱动和控制器驱动2种陀螺稳定器模型,并构造了相应的MATLAB Simulink框图。仿真结果表明:在有义波高为 2.5 m 时,自然驱动和控制器驱动减摇装置的减摇率分别为47%和84%,设计的控制器驱动陀螺稳定器与自然驱动模型相比,对横摇运动的抑制效果更好。
