迎浪中ONR内倾船参数横摇抑制措施研究
2022-08-20胡开业毛丽君
胡开业 赵 宾 周 辉 毛丽君
(1. 哈尔滨工程大学 船舶工程学院 哈尔滨 150001; 2. 天津航海仪器研究所 天津 300131)
0 引 言
内倾型船通常是指水线以上内倾设计且艏部为穿浪型舰首的舰船。内倾船因其独特的外形特征,使其雷达反射波大大减少,故这类船型能够实现优秀的隐身性能。与常规型船舶不同的设计特点使得内倾型船的稳性和运动特征与常规外飘型船型差异较大,如内倾船型的回复力矩通常较常规型船舶偏小,内倾船型在波浪中较容易出现较大的升沉和纵倾及较为严重的甲板上浪现象。考虑到内倾船型是未来军船发展的重点方向之一,因此非常有必要对该类船型在波浪中的稳性特性开展研究,特别是从参数横摇运动的机理出发,研究参数横摇的抑制或减缓措施,相关研究可为我国未来高性能隐身舰船的研发提供研究基础。
BASSLER等研究了重心位置的不同对内倾型船和外飘型船波浪中的动稳性影响,其计算结果可用于初步评估外飘和内倾肆2类船型的动稳定性差异。COOK开展了ONR内倾船横摇回复力矩在迎浪规则波中变化的约束模型试验,他们基于测量结果建立了一个模拟参数横摇的单自由度数学模型,其研究结果表明内倾船会出现参数横摇分叉运动,数值仿真结果表明可以用该模型预测内倾船的参数横摇现象。王建华等基于开源CFD软件OpenFoam,采用重叠网格技术研究了全附体ONR内倾船模在迎浪自航运动工况下的水动力特性,计算得到了该船的推力和扭矩系数,基于该船的流场信息特征分析了该型船在自航过程中的水动力变化特点,并与试验值进行了对比验证。目前的研究大多是关于开展内倾船参数横摇运动的理论预报方法及试验预报方法方面的,在避免参数横摇发生或降低参数横摇危害方面的研究尚且不足。
本文以ONR内倾船为研究对象,以最常见的舭龙骨为减缓参数横摇的技术措施,采用黏流分析软件STAR-CCM+对舭龙骨阻尼开展数值模拟研究并分析了舭龙骨参数变化对阻尼的影响,为了抑制参数横摇的危害,通过设计一种可伸展式舭龙骨减摇方案来抑制参数横摇的发生,数值仿真验证了该方案的可行性。
1 数值计算方法
1.1 数学方程
本文采用黏流计算流体动力学(computa- tional fluid dynamics,CFD)方法对含减摇附体的ONR内倾船开展数值模拟用于计算其横摇阻尼系数。CFD计算工具采用商业CFD软件STARCCM+,下面简要介绍其基本原理及处理方法。
计算中考虑自由液面的影响,整个流场属于两相、三维和黏性的不可压缩流体流动。对湍流的模拟采用雷诺平均法,控制方程为:

式中:为水密度,kg/m;为时间,s;u和u为速度分量;u′u′为雷诺应力,N;为流体的压力,N/m;为流体的动力黏性系数,N·s/m。
自由液面采用流体域体积函数VOF方法来追踪自由液面的运动状态,其方程为:

式中:a是第相流体在单元中所占的体积分数。
本文湍流模型选取了SST-湍流模型,微分方程的离散使用有限体积法,对流项的处理采用了二阶迎风格式。
1.2 研究对象
本文的研究对象为一公开几何数据的ONR内倾船。该船的横剖线图如下页图1所示,在其穿浪船体的舷侧有10°的内倾设计。为减少计算时间,数值模拟时采用了模型尺度,模型的缩尺比为1/40.526,下页表1给出了船的模型及实船主尺度参数。
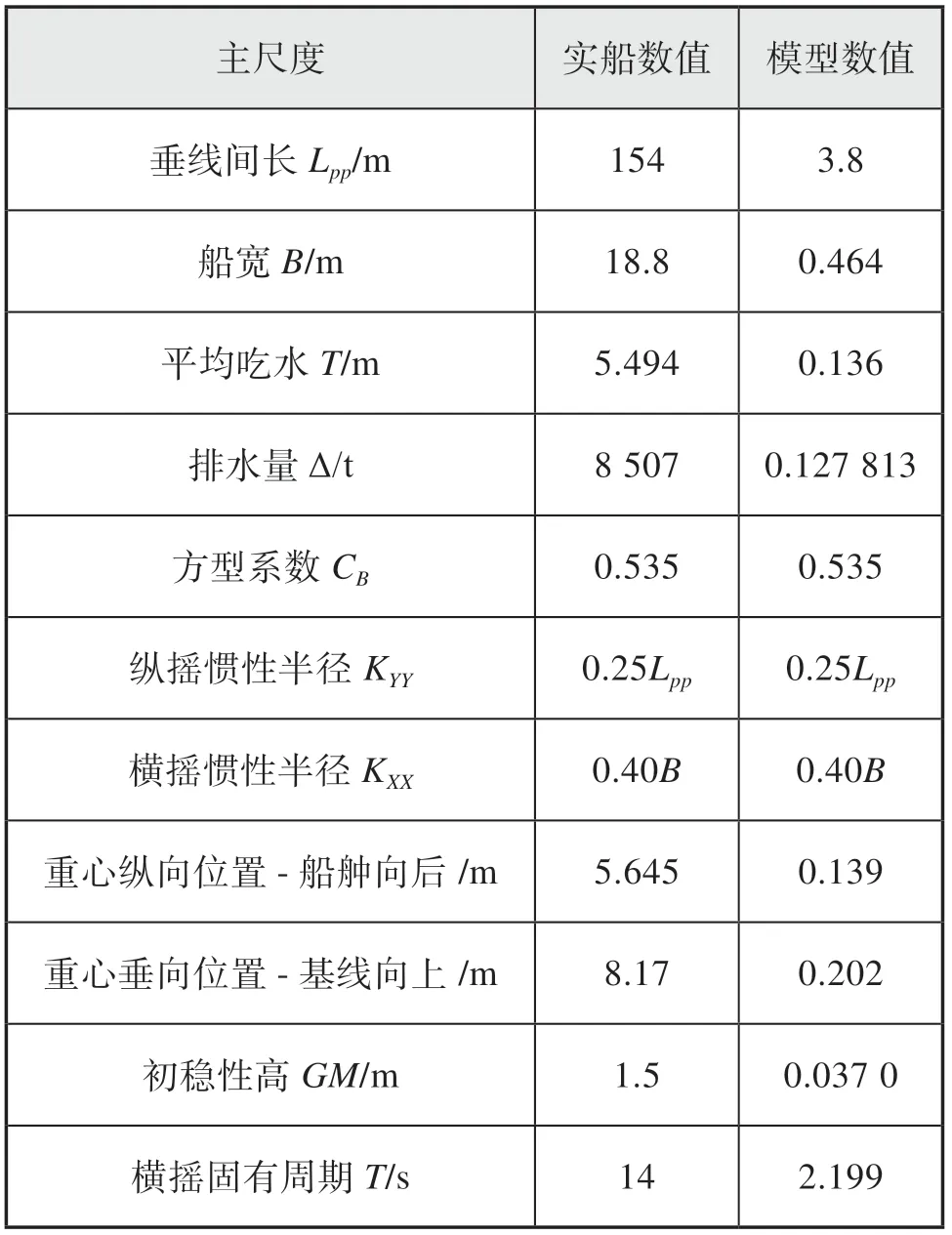
表1 ONR内倾船主尺度参数(缩尺比1/40.526)
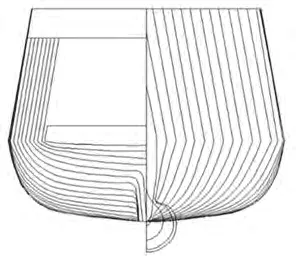
图1 ONR内倾船型线图
1.3 网格处理
网格选用切割体网格,网格划分过程中采用了重叠网格技术。重叠网格方法是一种非常方便实用的模拟大幅运动的网格处理方法,用该方法划分出的网格可使波浪中的浮体大幅运动过程中不会发生变形,采用重叠网格方法划分的计算网格如图2所示。整个流场计算域划分为背景网格区域和重叠网格区域,ONR内倾船船体区域被重叠网格区域包裹,重叠区和背景区域的数据交换采用线性插值的方式进行,2套网格之间进行过渡区域加密,使其保持相近的网格尺度。
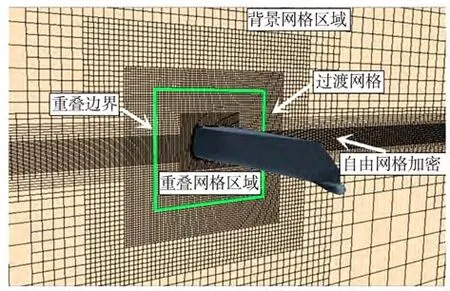
图2 重叠网格划分
对于横摇阻尼的模拟计算,最终设置的重叠区和背景区域的处理方案如图3和图4 所示,其中边界四周处设置了阻尼消波区,阻尼消波区长度为1.1倍船长。边界条件的处理选取入口边界条件为速度入口,出口边界条件定义为压力出口边界;壁面边界条件设置为光滑无滑移边界。

图3 重叠区域尺寸选取

图4 背景区域尺寸选取
1.4 求解参数设置及验证
求解参数设置为三维、多相流和非定常模拟,欧拉多相流设置为水和空气两相流动,将水和空气均设为恒密度流体;自由液面的追踪处理方法采用了VOF法,流体域考虑了重力的作用;流场的工作压力设置为1个标准大气压并将参考高度设在水面上;湍流模型选取为SST-模型,该模型可以比较准确地预报由逆压梯度导致的流动分离现象;对流项采用二阶离散格式。求解器参数设置中,时间步长项的设置为0.002 s,内迭代次数设置为10步。
为了验证上述计算仿真策略的正确性,对ONR内倾船开展初始10°横倾角的自由衰减CFD仿真模拟,图5为采用CFD方法的横摇衰减曲线。利用该衰减曲线绘制出的消灭曲线,可计算出其线性横摇阻尼系数为0.039 54。查阅试验报告,试验结果为0.037 62。数值仿真结果与试验结果对比误差为5.1%,误差较小,可以认为上述CFD计算策略是合理的。
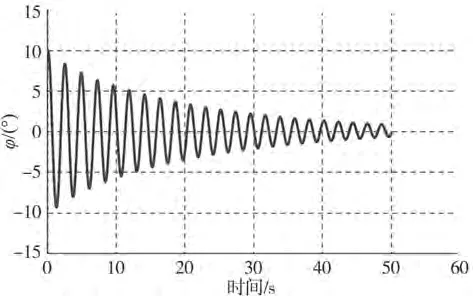
图5 ONR内倾船自由横摇衰减CFD模拟曲线
2 参数横摇抑制措施研究
2.1 减摇装置的选取
目前已有的减摇装置主要有舭龙骨、减摇水舱、减摇鳍、减摇陀螺和舵减摇装置等,其中舭龙骨是应用最广的一种减摇装置,其具有结构简单、造价低廉、安装方便和维护方便等优点。由于ONR内倾船的内倾设计特点导致其舱内空间有限,因此,本文选择舭龙骨作为该船的减摇装置。
2.2 设计参数对减摇效果的影响
本文的研究对象为ONR内倾船,该模型已设计一舭龙骨减摇附体,在本文中称其为初始方案。初始方案的舭龙骨布局如图6所示,其设计参数为:长度l为51.78 m、宽度b为1.25 m、安装角为43°,安装位置在该船中间位置的舭部沿着流线方向安装。
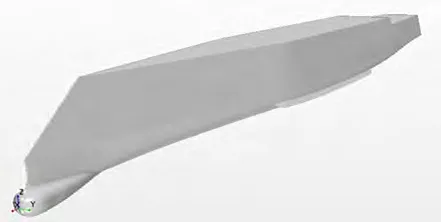
图6 带有舭龙骨的ONR内倾船(初始方案)
为了使舭龙骨产生较大的横摇阻尼力矩,舭龙骨一般安装在船舶的舭部,这样可具有较大的阻尼力臂。考虑到舭龙骨的存在将会增加船体的湿表面积,使得船舶航行时的阻力略有增加,因此为了减小舭龙骨的存在对阻力的不利影响,舭龙骨在沿船长方向布置时还需要与船体舭部处的流线方向保持一致。设计舭龙骨时,其横向尺寸一般不超出中站面最大宽度,这样可使船舶在停靠码头、进坞等作业时,舭龙骨不被碰撞受到损坏。
本节研究舭龙骨安装角度的不同对其横摇阻尼的影响。其中,安装角度定义如图7所示,即点水平线与舭龙骨阻尼力臂线的夹角,图中点为横摇中心。

图7 舭龙骨安装角度
基于初始方案并考虑到该船中站面最大宽度的限制,ONR内倾船的舭龙骨安装角度范围为38°~47°。在该范围内,采用CFD方法对其在不同安装角度下的横摇阻尼进行计算,考虑到航速对横摇阻尼值也有影响,本文的计算均选取一容易发生参数横摇的航速,即实船航速为3.887 m/s,弗劳德数()为0.1的航速工况,计算结果如图8所示。其中,舭龙骨长度和宽度分别为 51.78 m和1.25 m,与初始方案保持一致。
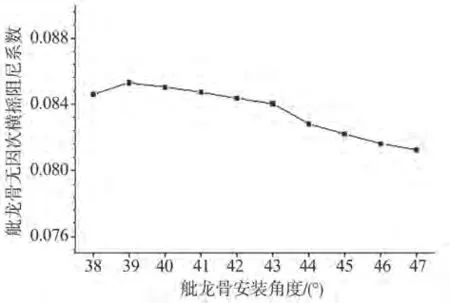
图8 舭龙骨安装角度对舭龙骨阻尼的影响
由图8的计算结果可以看出,在舭龙骨长度和宽度相同的情况下,对于目标算例船,舭龙骨阻尼同舭龙骨的安装角度呈现如下的规律:初始阶段其阻尼随着安装角度的增加而增加,在39°时达到最大阻尼值,之后随着安装角度的增大而减小;但总体来说,安装角度对舭龙骨阻尼的影响并不大。如对于本算例模型,在38°~47°角度变化范围内,横摇阻尼的最大与最小值差值约为9 N·m·s,为相对于最大横摇阻尼值的5%,变化幅度很小。算例模型初始方案的舭龙骨的安装角度为43°,从优化舭龙骨横摇阻尼的角度可使舭龙骨安装角度调整为39°,但无法通过调整安装角度获得很好地优化效果。
参数横摇薄弱性衡准表明,增加舭龙骨面积可使船舶更容易通过参数横摇薄弱性衡准,使参数横摇运动不易发生。因此,在设计时应尽可能使舭龙骨面积大一些,以增加舭龙骨的横摇阻尼,提高其减摇效果。但是舭龙骨的宽度越宽,其摇荡运动时流体对其结构的反作用力也会越大,对舭龙骨的结构强度以及其与船体的安装工艺均提出了更高要求。过宽的舭龙骨,还会大大增加船舶并靠作业时发生破坏的可能性,因此要综合考虑各方因素,确定合理的舭龙骨尺寸参数。
舭龙骨的长度在设计时一般选取为船长的1/5~2/3,但是舭龙骨长度存在一定的最佳值区间。在靠近船首、船尾处,船体舭部曲率较小,舭龙骨能够产生的阻尼力矩也较小。因此,在最佳区间外再增加舭龙骨的长度,其产生的横摇阻尼也不会再有显著的变化。ONR内倾船的方形系数为0.535,方形系数较小,属于瘦长型而不是丰满型的船型,因而适合采用短而宽的舭龙骨方案。因此,本文的研究中不再对舭龙骨长度进行改变,其值与初始方案保持一致,为51.78 m。
舭龙骨的宽度一般为船宽的3%~5%,取不同的舭龙骨宽度,分别计算舭龙骨的横摇阻尼,由此来分析舭龙骨宽度对横摇阻尼的影响规律,计算结果如图9和下页图10所示。其中图9为不同宽度方案下,舭龙骨阻尼与船舶总的无因次阻尼的对比,图10为不同舭龙骨宽度下,舭龙骨的阻尼在总黏性阻尼成分的占比。

图9 舭龙骨宽度对横摇阻尼的影响

图10 舭龙骨宽度对横摇阻尼的影响
图9和图10中,横坐标均为计算的舭龙骨宽度相对于初始方案中的舭龙骨宽度的比值。由图可见,增加宽度后,舭龙骨产生的阻尼显著增加,其在总的船舶阻尼成分中的占比也在增加,比如当舭龙骨宽度从 0.2倍的初始宽度增加到1.6倍的初始宽度后,总黏性阻尼系数从0.094增加到0.21,增加了122%,当舭龙骨宽度为1.2倍的初始宽度时,舭龙骨阻尼占总黏性阻尼的比例已经超过了一半。因此,在进行舭龙骨减摇设计时,应在保证舭龙骨自身的强度和连接强度的基础下,尽可能的增加舭龙骨的宽度,使舭龙骨能够产生足够的横摇阻尼。
2.3 改进的舭龙骨减摇装置
从上一节的计算结果可以发现,对于确定的船型,舭龙骨的减摇效果主要取决于其宽度值,舭龙骨越宽,其面积也就越大,能够产生更好的减摇效果。传统的舭龙骨在设计时为了避免船舶并靠及近岸作业时因舭龙骨超宽而发生碰撞造成损坏,其设计的最大宽度一般会限制在船舯最大宽度的界限内,这样就会造成舭龙骨减摇方案的一个减摇能力的上限问题。为了解决舭龙骨减摇能力问题,本文提出了一种使用导轨的可收放式舭龙骨装置方案,该方案能够通过导轨将舭龙骨副板部分或完全推出,由此来增加舭龙骨宽度,实现更优的减横摇效果;同时副板可收放,不需要时可收起副板,保证了作业的安全性。
本文提出的收放式舭龙骨装置借鉴了收放式减摇鳍的设计思想,该型装置由收放式舭龙骨和压杆驱动装置两部分组成,如图11所示。

图11 一种可收放的舭龙骨结构图
其中,收放式舭龙骨主要由舭龙骨主板、布置在主板上方的可收放式副板、液压驱动机构以及行进导轨构成,压杆驱动装置主要由液压杆、驱动导轨构成。舭龙骨主板与船体焊接在一起,不可收放,但在舭龙骨主板上设置有导轨,主板上方的副板通过嵌套在主板上与行进导轨的凹槽连接在一起,收放式副板由液压收放机构推动副板实现全部或部分展开,副板端部与压杆驱动装置铰接,压杆驱动装置沿船体舭部型线布置,同船体焊接,压杆驱动装置的液压杆杆端在驱动导轨内滑动,驱动导轨同时对液压杆杆端起支持作用,液压杆杆端同液压收放机构铰接。
当海上风浪较大需要舭龙骨提供更好的减摇效果时,可通过压杆驱动装置,推动副板,将其完全展开,如图12所示。展开后的舭龙骨其宽度增加了不少,能产生较大的横摇阻尼,提升减摇效果。
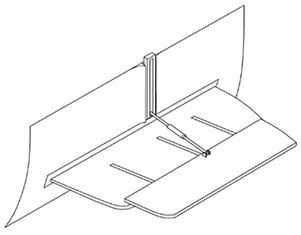
图12 舭龙骨的展开状态
这种改进的舭龙骨装置结构比较简单,舭龙骨副板能收放自如,舭龙骨的宽度尺寸将不再受船舶中站面最大宽度要求的限制。收放式舭龙骨装置可根据实际航行的需要打开或收起副板,当船舶横摇运动幅值较大时,可展开舭龙骨副板,提高减摇效果。当船舶在出现两船并靠作业、近岸作业时,则收起副板,防止因碰撞导致舭龙骨损坏。
3 算例分析
数值模拟方法采用三维势流方法,将不同方案下的横摇阻尼值作为输入参数代入到三维势流分析程序中,开展迎浪规则波中ONR内倾船参数横摇运动数值仿真,分析不同舭龙骨方案下的减摇效果和对参数横摇的抑制效果,其中舭龙骨方案分别为无舭龙骨方案、初始宽度方案和收放式舭龙骨方案。图13给出了3种方案下的船舯横剖图。
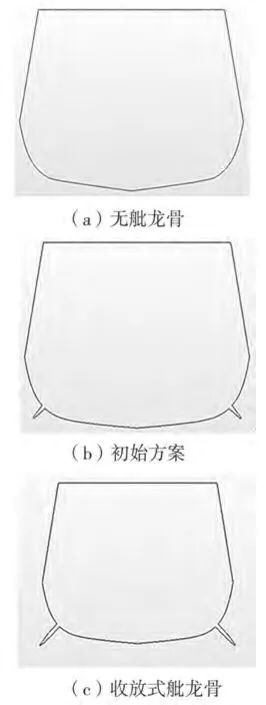
图13 不同舭龙骨方案
图14是ONR内倾船在迎浪规则波中模拟得到的横摇运动时历对比图。其中航速为3.887 m/s(=0.1),海况选取为一容易发生参数横摇的海况参数,即波长为154 m、波高为3.08 m。
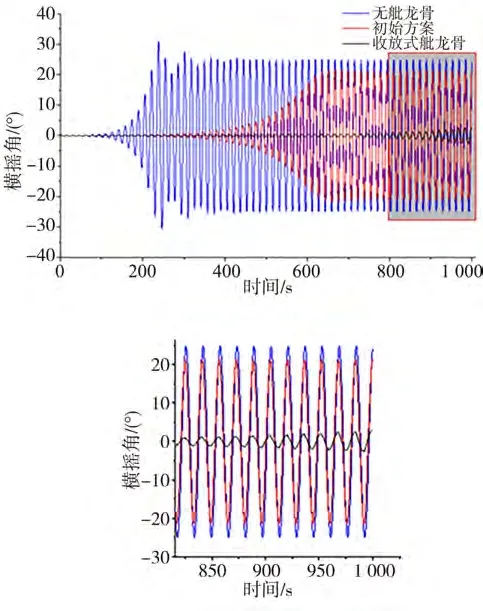
图14 横摇运动时历对比图
由数值仿真结果可见,安装舭龙骨对该船的参数横摇起到了很好的改善和抑制作用:不安装舭龙骨时,船舶横摇运动最大值可达30°左右,稳定横摇幅值为25°左右。安装初始宽度方案舭龙骨时,虽然该船仍然出现了参数横摇现象,但其稳定横摇值降到20°左右,减摇效果约为15%,参数横摇出现的时间也推迟了。当采用收放式舭龙骨方案时,该工况下船舶的横摇运动幅值很小。可以认为,使用收放式舭龙骨方案成功抑制了该船参数横摇运动的发生。
为了进一步研究舭龙骨减摇装置的减摇机理,图15和图16给出了初始宽度方案和收放式方案下的船舯处速度矢量图。

图15 船舯速度矢量图(初始方案)

图16 船舯速度矢量图(收放式舭龙骨)
对比两图可见,收放式方案的舭龙骨处产生的漩涡明显比初始宽度方案的漩涡要大。通过对整个摇荡周期的流场分析研究还可以发现,收放式方案的舭龙骨处旋涡的生成速度和脱离船体的速度也比初始宽度方案更迅速, 消耗船舶摇荡运动的能量也更多,因此能带来更好的减摇效果。
4 结 论
本文选用舭龙骨作为ONR内倾船减摇和抑制参数横摇发生的工具,开展了舭龙骨设计参数变化对减摇效果的影响规律研究,提出了一种能有效抑制参数横摇发生的收放式舭龙骨减摇装置,通过数值仿真验证了该装置的减摇效果和对参数横摇的抑制效果,得到如下结论:
(1)优化舭龙骨的安装角度对提高ONR内倾船的横摇阻尼的贡献较小,长度上也无较多的优化空间,但宽度上的增加对提高横摇阻尼的作用非常显著。舭龙骨在设计和安装中还应考虑其对船舶阻力的影响。
(2)本文提出的新型收放式舭龙骨装置,突破了传统舭龙骨设计时在舭龙骨宽度上的限定条件,能够起到更好的减摇效果,对参数横摇也具有很好的抑制作用。
(3)该新型减摇装置也可为其他类型船舶的减摇及参数横摇抑制提供参考。
