刚柔耦合机械臂的滑模预测振动控制研究
2022-08-19徐丽莎
林 冲,王 刚,徐丽莎,邓 华
(中南大学 高性能复杂制造国家重点实验室,长沙 410082)
由轻质化柔性构件组成的机械臂需要的材料更少且具有更高的操作速度、更低的能耗等特点[1-2],因此在满足稳定性和强度要求下,柔性机械臂在工程中应用越来越广泛。由于刚柔性机械臂状态变量之间存在复杂的耦合关系,且由各阶模态组成的内动态子系统不仅受控制输入的影响,还受输入输出子系统的影响,动态行为十分复杂[3-4]。同时柔性臂在运动控制的过程中会产生剧烈的弹性振动,因此需要研究适用于柔性机械臂的轨迹跟踪控制策略[5-7]。Vo等[8]针对双连杆柔性机械臂,提出了一种PID-非奇异终端滑模控制,其收敛速度快且稳定性好,具有良好的轨迹跟踪性能,但控制器结构较复杂。Sun 等[9]将刚柔机械臂动力学模型分解为输入输出子系统和内动态子系统,基于模糊控制实现轨迹跟踪,但未考虑柔性臂运动时的末端振动情况。Ge等[10]通过奇异摄动控制方法,在快变子系统模型基础上设计基于自适应动态轨迹规划的轨迹跟踪控制器。
针对上述问题,本文设计一种滑模预测控制器实现轨迹跟踪控制,通过预测模型预估系统未来的输出,消除末端控制误差,提高控制精度,同时考虑内动态子系统对柔性臂末端振动位移的影响,减少末端振动。首先基于输出重定义法得到柔性臂末端的观测量,将内动态子系统转换为零动态子系统,将预测作为跟踪误差及其高阶导数组合的滑模面,并将滑模面引入预测控制的二次性能指标,通过最小化性能指标,得到具有显式解析形式的滑模预测控制律,该性能指标可以消除由于滑模控制的切换而引起的抖振现象,抑制柔性臂末端的振动,从而保证整个刚柔性机械臂系统的渐近稳定。最后将其通过仿真和实验与传统滑模控制器进行比较分析,发现该方法可以减少柔性臂末端的弹性振动,具有更优越的轨迹跟踪性能。
1 控制模型的建立
1.1 系统的动力学模型
本文研究的刚-柔耦合机械臂由两个连杆组成,第一个连杆是刚性的,第二个连杆是柔性的,柔性连杆由细长的柔性梁组成,与刚性旋转轮毂连接,假设柔性连杆可以在水平面内自由弯曲,但在垂直方向和扭转中是刚性的,系统结构组成如图1所示。
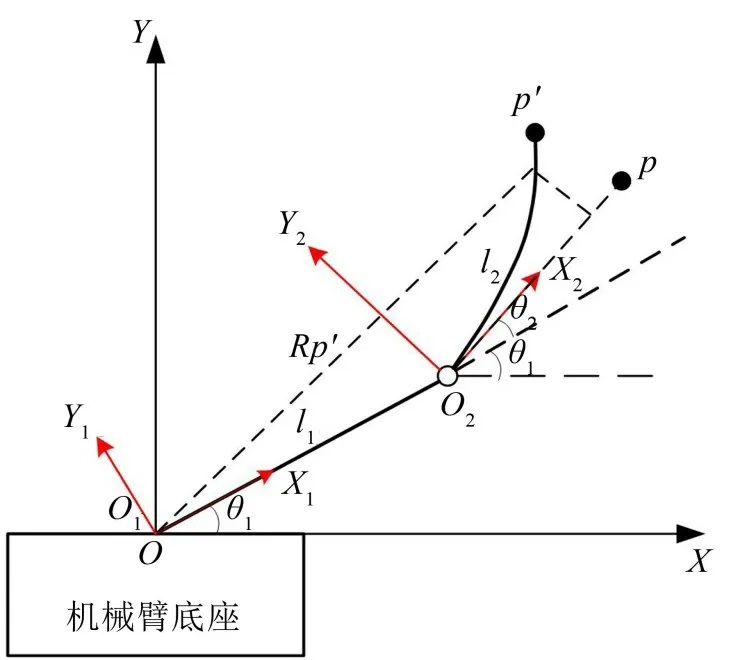
图1 结构简化示意图
图1中,刚性臂和柔性臂长度分别为l1和l2,OXY坐标系是基坐标系;O1X1Y1坐标系和O2X2Y2坐标系是固定于刚性臂和柔性臂基座的局部坐标系,θ1和θ2是刚性臂和柔性臂运动的相对角度,p′是p点发生变形后在基坐标系OXY中的位置向量,根据文献[11]得到刚柔耦合机械臂的动力学方程,考虑机械臂各关节摩擦因素后,可得动力学模型为:

式中各矩阵参数为:
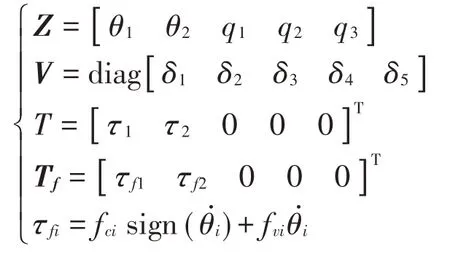
如式(1)所示,qi为柔性臂的各阶模态,M为5×5广义质量矩阵,V为广义阻尼矩阵,F是由离心力与科氏力引起的非线性项,T为广义驱动力矩,Tf为摩擦力矩,fci为库伦摩擦力矩系数,fvi为黏性摩擦力矩系数。
1.2 系统输出重定义
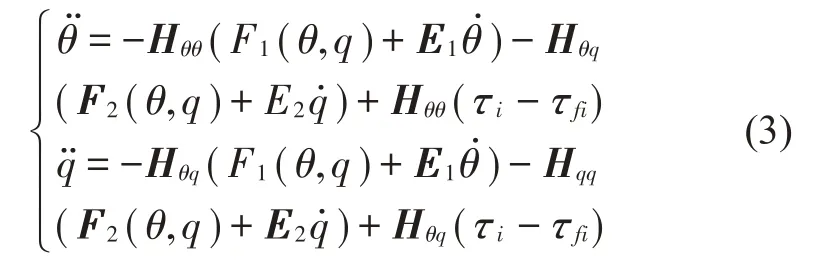
在刚-柔机械臂运动控制的过程中,不仅要使柔性臂末端位置能够精确跟踪期望的运动轨迹,同时要抑制柔性臂在运动过程中产生的弹性变形,当以柔性臂末端位置作为系统的输出时,此时是非最小相位系统。输出重定义法是克服非最小相位系统常用的有效方法,本文采用输出重定义法重新得到柔性臂末端的观测量[12]。由于上述推导的刚-柔机械臂系统的动力学方程是五阶非线性强耦合微分方程,因此需要将方程式(1)变换为:

如式(2)所示,左右两边分别乘以M-1,设M-1=得到关于转角θ和模态坐标q的输出方程如下:
通过输出重定义法将刚柔机械臂末端位置表示为:

根据上述系统输出重定义结果,对式(4)进行二次微分,得到系统输出结果:

由于刚-柔机械臂系统的维数是5,输入输出子系统维数为2,所以不可观测的内动态子系统维数是3,通过内部子系统的设计,尽可能地降低柔性模态对末端位置的影响,因此不仅要考虑系统输入输出子系统,而且需要考虑内动态子系统,构造系统的内动态子系统状态方程如下:

故有:
2 滑模预测控制器的设计
2.1 系统控制器的设计
对于刚柔机械臂输入输出子系统,结合滑模控制的强鲁棒性和预测控制的优良寻优性能设计滑模预测控制器,通过预测模型预估系统未来的输出,消除末端控制误差,提高控制精度,保证末端位置快速渐近地到达给定的期望轨迹[13-14]。内动态子系统不仅受控制输入的影响,还受输入输出子系统的影响,动态行为十分复杂,难以直接对其进行分析,因此将内动态子系统转换为零动态子系统,降低输入输出子系统对其产生的影响,滑模预测控制器控制原理如图2所示。
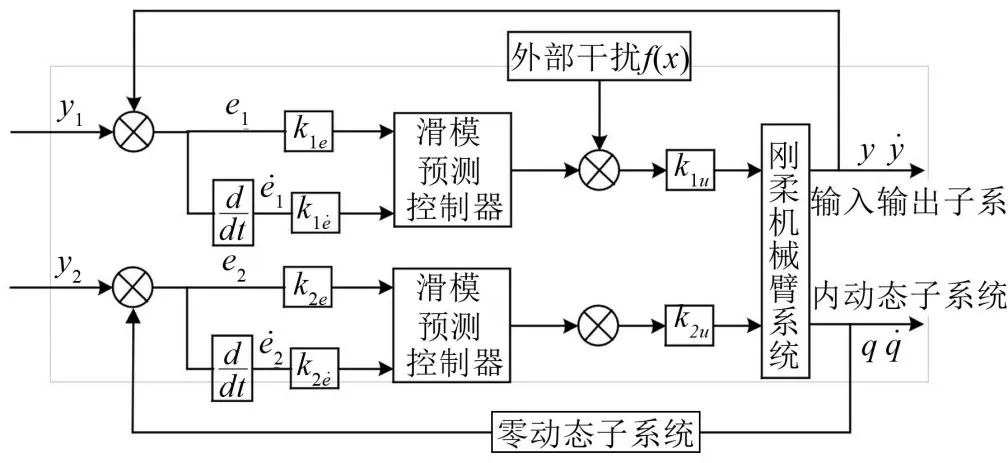
图2 滑模预测控制原理图
根据滑模预测控制的参数确定原理,将刚性臂和柔性臂的期望运动角度和实际运动角度的误差ei和误差的导数值作为滑模预测控制的输入,关节转矩和内动态子系统q作为输出,取值如下:

首先对输入/输出子系统进行滑模预测控制器的设计,取滑模函数:

如式(7)所示:e=yb-y,yb为期望运动轨迹。对滑模函数求微分得到:

预测经过时间T时的滑模面为:

预测控制目标为y(t+T)→yd(t+T),因此,设计滑模预测控制目标函数为:

要实现最优控制需满足如下条件:

因此,最优控制条件可转化为s(t+T)=0,由式(8)和式(9)可得:

得到系统输入/输出的滑模控制器为:

根据Lyapunov函数原理:
对V进行微分,将式(4)和式(8)代入,得:

将式(13)代入式(15)中,化简得:

因此,根据李雅普诺夫稳定性判据,证明了上述设计的控制律表达式(14)可在有限的时间内收敛到滑模面,保证系统的渐进稳性。
2.2 内动态子系统的设计
基于系统输出重定义法[15-16],得到刚柔机械臂的内动态子系统方程,使用泰勒级数在x=0 处展开方程式(2)中的质量矩阵M,得到:

其中:

H0是一个常数矩阵,fh(x)代表x中具有高阶项的矩阵,将式(17)代入方程式(6),得到:

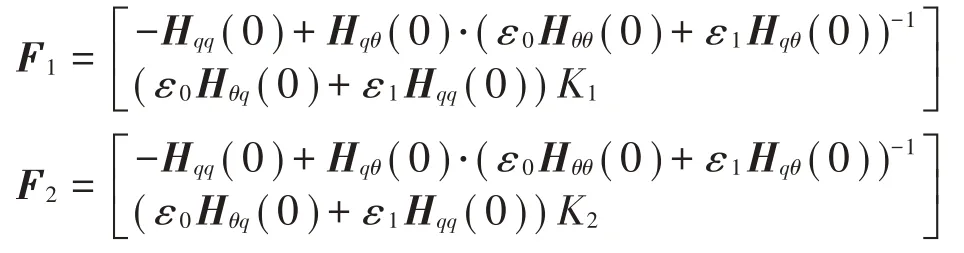
F1和F2是常数矩阵,表达式如下:
化简后得到:

式中:Ω代表区域空间,K1和K2代表系统参数,在设计控制器的过程中,将系统参数设计为严格使矩阵F1和F2的所有特征值都在左半复平面上,通过极点配置法取:
ε0=diag([4.416.12]),ε1=diag([1.239.20]),K1=17.5,K2=10.5,则可以确保动力学方程式(20)在平衡点x=0 处是渐近稳定的,减少了输入输出子系统对内动态子系统的影响。
2.3 仿真和实验结果分析
为了分析本文中设计的刚柔机械臂输入输出子系统和内动态子系统的滑模预测控制器(Sliding Mode Predictive Controller,SMPC)的控制效果,对系统控制模型进行动力学仿真,并与传统的滑模控制器(Sliding Mode Controller,SMC)比较。刚柔机械臂的系统参数如表1所示,给定阶跃信号:yd=[0.25 0.25]T,滑模预测控制时间为T=0.1 s,采样时间为10-3s。仿真结果如图3至图5所示。
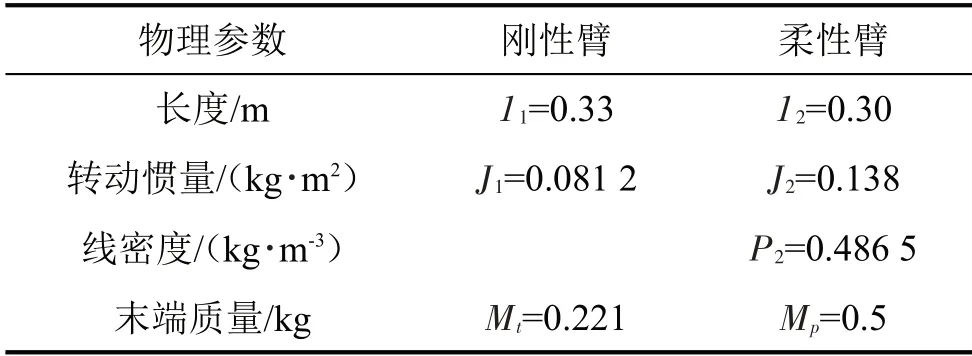
表1 刚柔性机械臂的系统参数
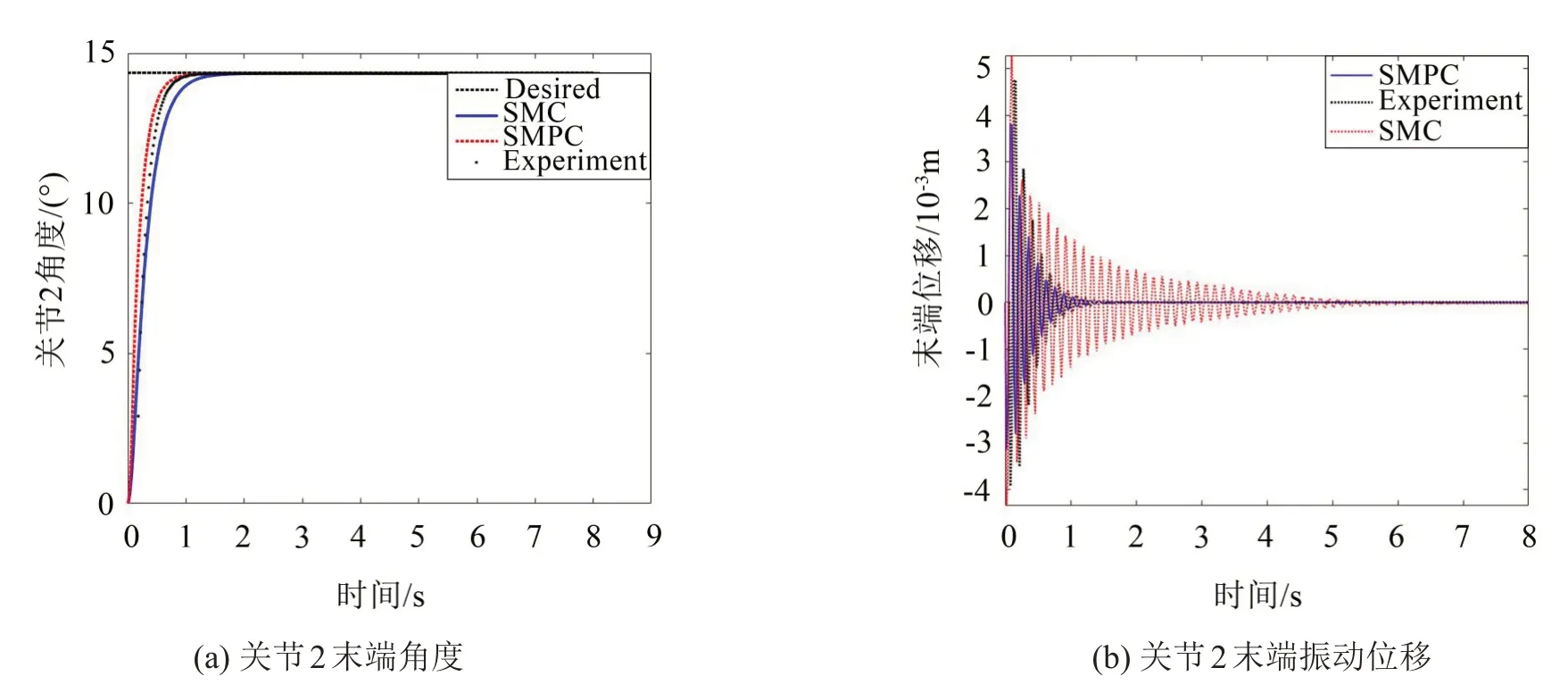
图3 阶跃响应结果
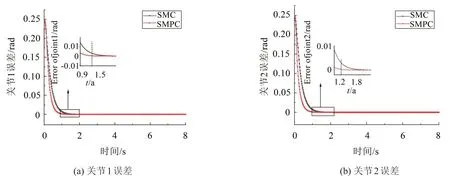
图5 误差变化
进一步搭建刚柔耦合机械臂实验平台如图6所示,在柔性机械臂的不同位置粘贴电阻应变片,将电阻应变仪的测试端口与应变片连接,根据应变片电阻变化值与变形量的关系计算得到柔性臂的振动位移。采用固高运动控制卡实现整个系统的运动控制,计算机通过与运动控制器的通讯得到伺服电机光电编码器的信号,进而反馈伺服电机的运动状态,得到实时的运动参数。

图6 实验平台
如图3(a)所示,本文设计的控制器具有良好的动态跟踪性能,无超调量且无稳态误差,但滑模预测控制器的响应速度优于传统滑模控制器,且和实验数据基本吻合。
如图3(b)所示,采用滑模预测控制器可以减少柔性臂末端的振动位移,使系统更快速达到稳定,通过实验测量所得的柔性臂末端的振动位移证明了其有效性。
如图4所示,采用传统滑模控制器时得到的两关节输入力矩存在一定的抖振现象,且输入力矩波动范围较大,采用滑模预测控制器则可以避免这种现象,两关节输入力矩可以快速到达稳定且使抖振减小;
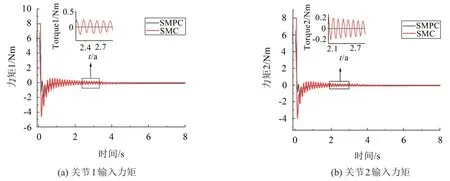
图4 控制器输入力矩变化
如图5所示,设计的滑模预测控制器跟踪误差小于传统滑模控制器,误差收敛速度逐渐趋于平缓,跟踪效果良好。
3 结语
针对刚柔机械臂系统轨迹跟踪和末端振动控制的问题,设计了一种基于滑模预测控制的有效控制方案。为了解决非最小相位系统的问题,采用输出重定义法得到柔性臂末端的观测量,并将内动态子系统转换为零动态子系统,通过分析零动态子系统的动态特性,设计了重新定义的系统输出参数;将预测作为跟踪误差及其高阶导数组合的滑模面,得到滑模预测控制律,同时抑制柔性臂在运动过程中产生的弹性变形,保证整个刚柔性机械臂系统的渐近稳定。根据仿真和实验结果可知,与传统的滑模控制器比较,本文中提出的滑模预测控制方法可以抑制柔性臂的末端振动,收敛速度更快,跟踪误差更小,并且可以有效避免关节输入力矩的抖振现象,最后通过仿真和实验证明了该方法的优越性。