适应宽范围拉索直径的拉索机器人研制
2022-08-18付雪奇胡小立陈华平
付雪奇, 胡小立, 陈华平, 赵 敏,丁 宁
(1.香港中文大学(深圳)机器人与智能制造研究院,广东 深圳 518000)(2.深圳市人工智能与机器人研究院,广东 深圳 518000)
斜拉桥作为近几十年才兴起的一种新型桥梁,因其具有良好的抗震性能和较低的建造成本,在世界上被广泛应用。目前我国斜拉桥总跨径居世界前列,需要进行维修的桥梁数量逐渐增多,桥梁养护问题凸显[1-2]。拉索是斜拉桥的主要受力构件,一般由PE保护层、包覆层、内部钢丝束组成[3]。拉索长期暴露在空气中,拉索表面PE层易因老化和外力作用而出现严重损伤,使内部钢丝束腐蚀,甚至出现断丝。同时,由于风振、雨振及车辆在桥上行驶产生的振动等因素,拉索内部钢丝束之间相互摩擦,产生磨损,严重时也会造成钢丝束断丝[4]。
与斜拉索维护配套的相关措施还不完善,现阶段主要是依靠人工完成,大多是采用吊篮或升降装置搭载工作人员和设备对拉索进行检修。检修人员在户外高空作业,环境恶劣,存在安全隐患。同时每进行一根拉索维护都得预固定锚固装置,工作量大,效率低,几百千克重的设备在拉索上移动极易造成拉索二次损伤。为此,许多学者进行了深入的研究。韩国成均馆大学的Kim等[5]设计了六轮拉索检测机器人,该机器人可以根据拉索表面情况调节机器人对拉索的抱紧力,但能耗较大;德黑兰大学的Mahdavi等[6-7]研制了一种路灯清洗机器人,跟桥梁拉索机器人类似,该机器人可以调节连杆角度以适应在不同直径的拉索上爬升。美国IPC公司是少有的几个可以使用拉索机器人进行实际应用的公司之一,该公司的机器人有4个摄像头,可以360°视角检测拉索表面是否存在损伤[8]。我国对拉索维护机器人的研究晚于国外,上海交通大学先后研制了三代拉索维护机器人,其自重均达上百千克[9-13];在“863”计划资助下,东南大学研制了螺旋爬升拉索机器人,提出了以行走轮半径的单位越障能力h/r作为评价机器人越障性能的指标[4];重庆大学开发了一款可用弹簧调节压紧力大小的拉索机器人[14];华南理工大学设计了一种双边轮式拉索机器人,通过螺栓调节机器人可适应不同直径的拉索[15];华南理工大学还对蛇形拉索机器人应用进行了研究,并给出了机器人的仿真结果[16-17];中铁大桥局武汉桥梁科学研究院已研制了4代拉索智能检测机器人“探索者号”,是目前国内最具代表性并已开始使用的拉索检测机器人之一。
综观国内外拉索机器人,根据爬行部件形态可以分为轮式和足式拉索机器人。轮式拉索机器人行走速度快但负载小,而足式拉索机器人行走速度慢、负载大。目前的机器人尚不能同时做到行走速度快、负载大,且现有机器人仅能适应拉索直径在小范围内变化,不能满足宽范围直径拉索的检测。因此,研制一款能适应宽范围直径且具有速度快、负载大特点的拉索机器人很有必要。
1 拉索机器人整体结构
综合国内外拉索机器人性能和桥梁拉索实际情况,制定了本文拉索机器人性能指标,见表1。机器人采用模块化设计,其结构如图1所示,由小车模块、调节模块、足掌模块和控制模块组成。小车模块有2个,是用于机器人在拉索上爬行的功能模块,对向布置;2个调节模块分别与2个小车模块相连,也为对向布置;足掌模块有2个,分别装在2个调节模块上。
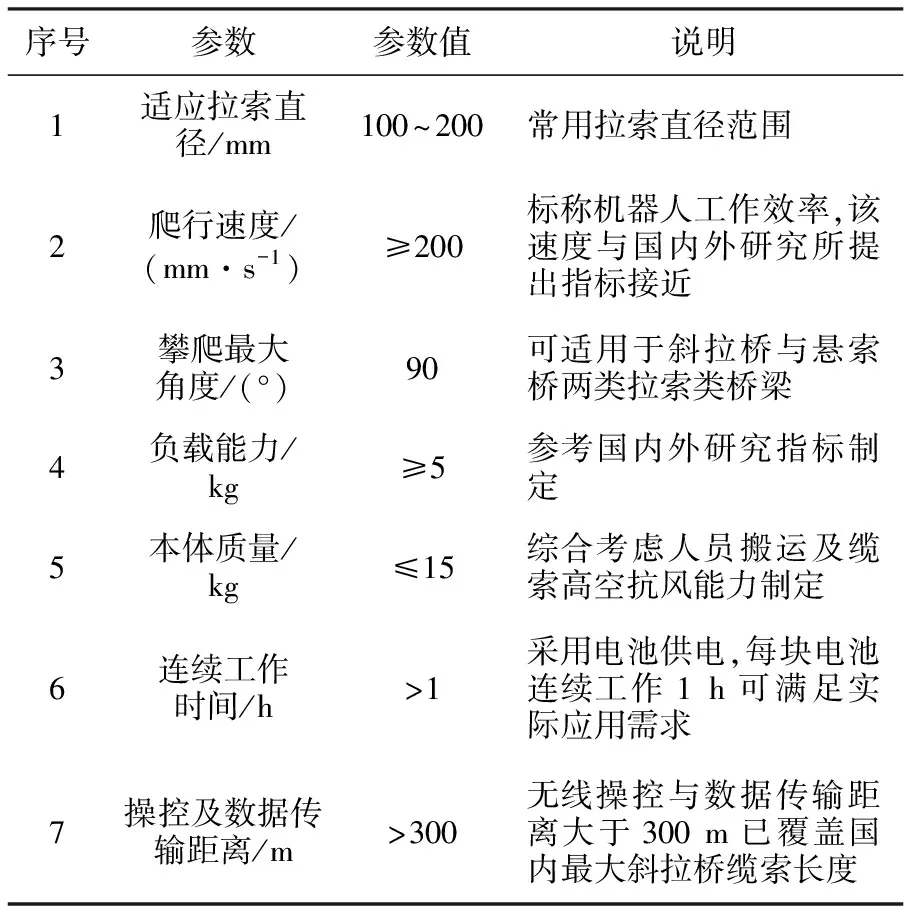
表1 拉索机器人性能指标
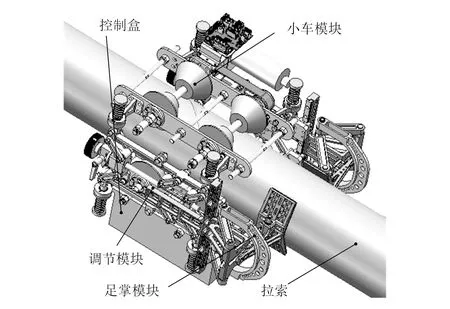
图1 拉索机器人结构图
1.1 小车模块
小车模块结构如图2所示,机架上装有滚轮轴,每个滚轮轴上安装两个锥形滚轮,两个锥形轮可以等效成一个V形轮,能有效减少机器人自旋[18]。滚轮为表面包覆有软橡胶的铝合金轮,包覆软橡胶可以在增加摩擦力的同时防止伤及拉索表面。两个锥形轮间中空柱状挡圈为两个半圆柱形的组合挡圈,更换组合挡圈,可以使滚轮分别适应100~150 mm和150~200 mm两种直径范围的拉索。小车模块由伺服电机经涡轮蜗杆减速机驱动,滚轮轴通过同步带带动使小车模块的驱动方式为四驱,可以增加小车模块的爬行能力和越障能力。两侧的减震装置可以使机器人适应振动和越障产生的两小车模块相对位置的车体变化。
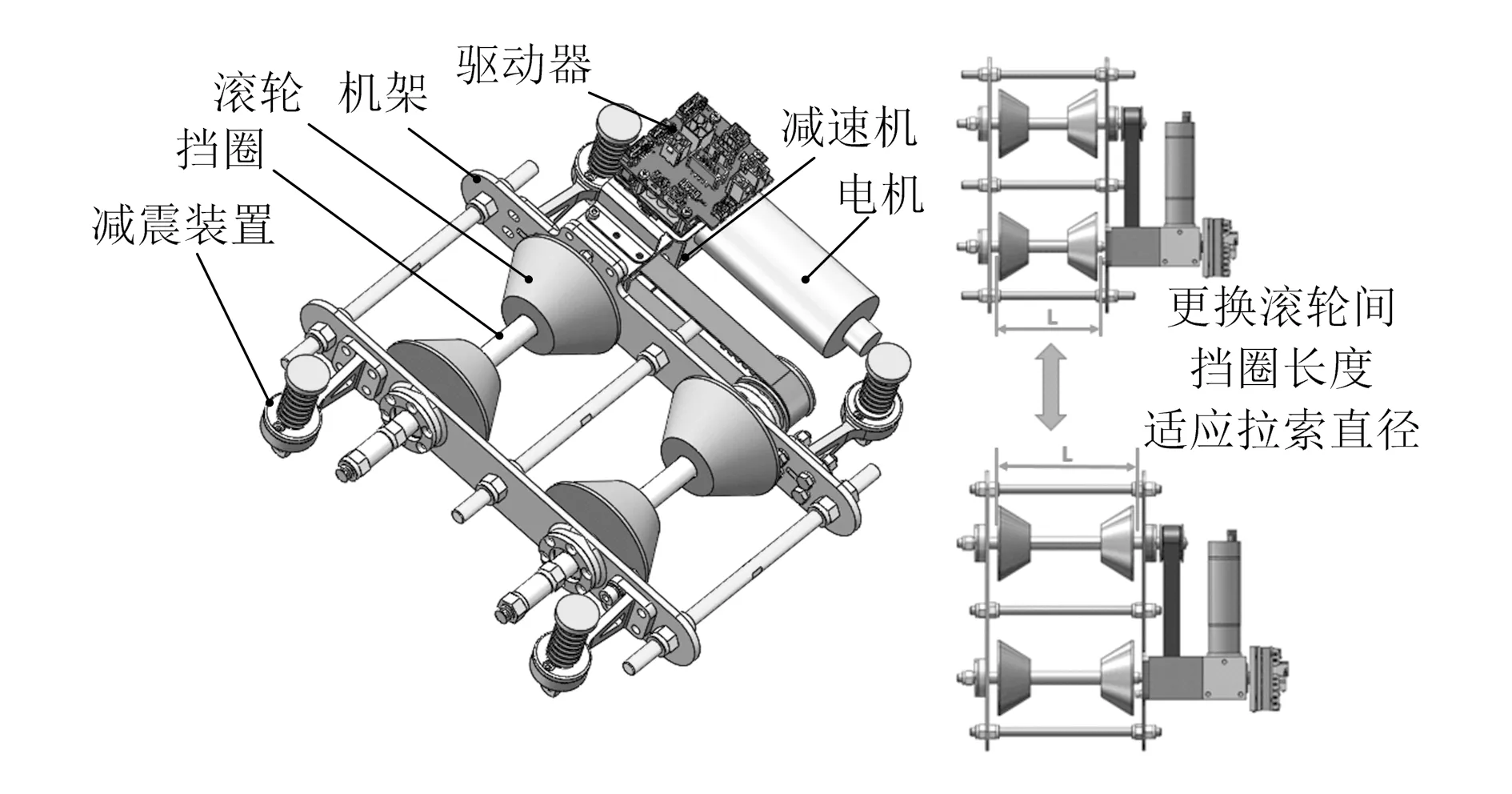
图2 小车模块结构图
1.2 调节模块
调节模块连接足掌模块和小车模块,其结构如图3所示,通过边上的销孔与小车模块的减震装置连接,足掌模块固定在两个连接边和连接块1的安装孔上。拧动旋轮带动T型丝杆旋转,改变连接块1和连接块2之间的距离从而改变两个连接边之间的距离,达到改变两个小车模块之间距离的目的,实现两个小车模块对不同直径拉索的贴合。调节到合适位置,并使小车模块上的减震弹簧有适当的压缩量后,锁紧丝杆,防止T型丝杆转动,从而使两个连接边之间距离固定。

图3 调节模块结构图
1.3 足掌模块
足掌模块结构如图4所示,导轨1和导轨2连接调节模块,可以保证足掌模块始终处于调节模块中间位置(即机器人中间位置)。足掌通过导轨3与连接座连接,可以伸出和缩回,杆1和杆2铰接,两者的铰接处装有吊环,连接座和足掌之间由弹簧连接。当吊环受力往下拉时,足掌伸出,当吊环不受拉力作用时,在弹簧的作用下足掌收回。该足掌模块实质上是一个三角增力机构,将施加在吊环上的力转化为施加在拉索上的抱紧力,使足掌产生的摩擦力大于吊环的拉力。足掌模块自锁条件如下:
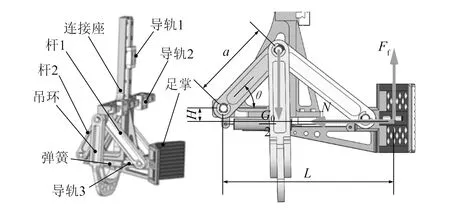
图4 足掌模块结构图
Ff=G0/2
(1)
acosθG0/2+NH=FfL
(2)
μN≥G0/2
(3)
μ(L-acosθ)/H≥1
(4)
式中:Ff为拉索对足掌的摩擦力;G0为作用在吊环上的拉力;a为杆2两铰接点之间距离;θ为杆2与水平线夹角;N为拉索对足掌的反作用力;H为足掌受力中心与杆2下铰接点的垂直距离;L为足掌受力中心与杆2下铰接点的水平距离;μ为摩擦系数。
足掌模块为本文机器人用于功能拓展的组件,作业机器人、检测作业模块(本文统称负载本体)通过柔性绳索挂在足掌模块的吊环上,在负载本体上有收放绳索的卷扬机,足掌模块和机器人组成仿生机器人系统。将机器人系统分解为较轻的攀爬前体(本文所述机器人)和较重的负载本体(有电驱足掌),可有效拓展机器人的负载能力。两者之间通过可收放的柔性绳索连接组成仿生机器人系统,模拟自然界蠕虫爬行方式,实现机器人系统的交替攀爬,如图5所示。当负载本体的电驱足掌不抱紧拉索时,因负载本体的重力作用,负载本体通过绳索拉紧吊环,足掌模块足掌抱紧拉索,负载本体可通过卷扬机收放绳索使自身上下攀爬;当负载本体的电驱足掌抱紧拉索时,卷扬机同时收放绳索,足掌模块吊环不受力,其上足掌在弹簧作用下不去抱紧拉索,机器人可进行上下运动。

图5 仿生机器人系统
2 拉索机器人动力分析
2.1 拉索机器人力学分析
机器人攀爬的最大角度为90°,即沿垂直拉索向上运动,此时所需的驱动力最大。机器人小车模块同一滚轮轴上两个锥形滚轮可以等效于一个正压在拉索上的轮子,拉索直径越大,等效轮的直径越大,在其他条件不变的情况下,轮子直径越大,需要的驱动力越大,因此本文拉索机器人在攀爬直径为200 mm的垂直拉索时所需要的驱动力最大,其受力简图如图6所示。
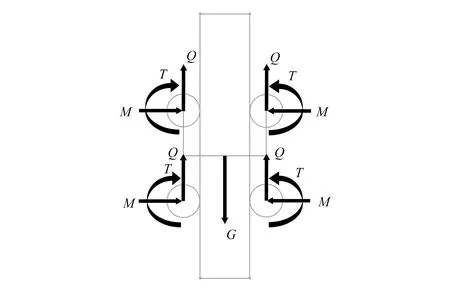
图6 受力简图
机器人在拉索上运动时滚动摩擦系数f<静摩擦系数f0,轮子所受压力恒定及爬行动力足够时,静止时机器人也不会滑落。机器人在拉索上不下滑所需的最小静摩擦力F0为:
F0=4fMG
(5)
机器人保持不下滑时单个等效轮所需要的扭矩T:
T=F0r/4=fMGr
(6)
机器人往上攀爬时单个等效轮所需驱动力Q:
Q=G/4=fM
(7)
电机功率P:
P=2Qv/η=2fMv/η
(8)
式中:M为正压力;G为重力;r为等效轮半径;v为机器人爬行速度;η为驱动效率。
2.2 驱动电机选型及校核
计算时等效轮取最大等效直径r=30 mm。其他参数为:G=200 N(含5 kg负载),f0=0.3,f=0.2,v=0.2 m/s,η=0.75。
由式(5)~(8)得机器人不下滑等效轮最小正压力为:
M=G/(4f)=25(N)
(9)
所需最小电机功率P为:
P=2fMv/η=26.67(W)
为使住培相关制度“落地”,齐鲁医院完善了毕业后医学教育委员会-职能部门-专科考核委员会-科室住培领导小组四级管理机构与职能,确立医院层面一把手亲自抓、分管院长具体抓、定期召开院级住培专项工作会议、重大议题经由党政联席会讨论决定的工作机制。强化职能部门作用,增加配备专职管理人员至15人。明确专科培训主体定位,适当放权与加强监督并重,强化专科管理力度。在各专科设置专管住培项目的分管主任和秘书,并在涉及多学科的专科设置专职培训助管,与专科衔接协管,进一步强化了专科层面管理规范性。以“确保管理链条无断点,培训要求逐层落实到位。”
(10)
机器人在垂直拉索上保持不下滑时一侧两个等效轮需要的最小扭矩Ts为:
Ts=2T=2fMGr=3(N·m)
(11)
机器人以0.2 m/s速度爬行时滚轮的转速n1为:
n1=60v/(2πr)=63.69(r/min)
(12)
根据以上计算结果,初步选定电机,其额定功率P电机为130 W,额定转速n2为3 990 r/min,额定扭矩T电机为299 mN·m。初步选定的减速机减速比i为30,输入端允许最大扭矩为2 N·m,效率为0.70。
为判断所选驱动器和电机是否满足设计要求,对机器人所选电机进行功率校核,电机的功率安全系数取1.6。
P输出=130×0.70=91(W)>1.6P=
42.67(W)
(13)
式中:P输出为电机经减速机后的输出功率。
取电机输出扭矩安全系数为2,则电机经减速机后输出扭矩T输出为:
T输出=T电机iη=6.29(N·m)>2Ts=
6(N·m)
(14)
速度校核:
v=2πrn2/(60i)=0.42(m/s)>0.2(m/s)
(15)
由以上计算和校核结果可知,所选驱动电机满足机器人攀爬需求。
3 拉索机器人实验
本文所述机器人有爬行速度和负载能力要求。垂直爬升状态是机器人爬行的极限状态,机器人在极限攀爬状态攀爬速度和负载能力若能满足指标要求,则认为机器人可以满足指标要求。
拉索机器人及其在斜拉索上进行攀爬情况如图7所示。用于验证机器人技术指标的仿真测试平台设计为竖直的拉索,参照标准GB/T 18365—2018《斜拉桥用热挤聚乙烯高强钢丝拉索》中缆索规格,选择直径为100,145,200 mm 3种规格拉索进行实验。设计的拉索为铝管材机加工而成,每段1 m,中间用连接件连接,外面包覆PE材质,模拟真实的拉索表面环境。每种规格的拉索总长为4 m,由4段包覆PE的铝管材组合而成,每种规格拉索底部都有个固定座。

图7 拉索机器人在斜拉索上攀爬
机器人性能指标测试方法和评估标准见表2。

表2 机器人性能指标测试方法和评估标准
机器人在直径分别为100,145,200 mm的仿真拉索上垂直向上攀爬,如图8所示。机器人攀爬时拍摄视频,根据视频中从1 m处攀爬至3 m处所用时间计算机器人攀爬速度。3种规格拉索上机器人的攀爬速度见表3,表中1 m处时间为t1,3 m处时间为t2。机器人在攀爬时其上挂的负载为哑铃配重块,两侧各配2.0 kg和2.5 kg组合的配重块,共9 kg,电子秤实际称量为8.85 kg。由测试结果可知,机器人满足性能指标1~4要求。

图8 机器人在垂直拉索上进行攀爬
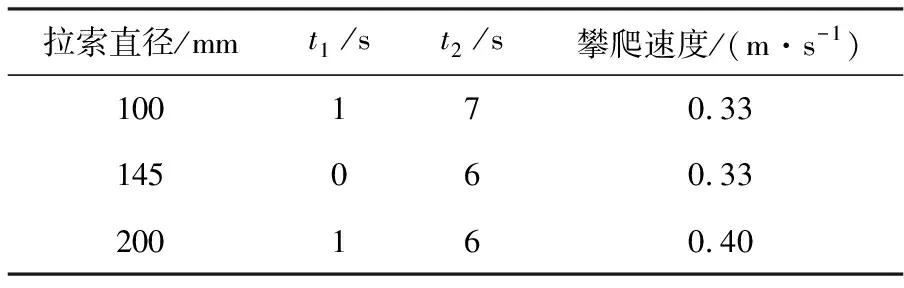
表3 机器人在各规格拉索上攀爬速度
对机器人本体称重,为12.8 kg,满足性能指标5要求。选用的电池为24 V 15 A·h,测试中机器人连续运行1 h后,电池仍能对机器人供电保证机器人正常运行,满足性能指标6要求。在户外相隔300 m对机器人进行控制测试,如图9所示。两个操作员携带机器人到距控制人员346 m远的地方,控制人员对机器人发送控制指令和接收机器人反馈的数据,机器人侧操作人员观察机器人是否能按接收到的指令正常运行。测试结果表明,机器人可以接受指令并正常运行,控制人员也可以接收到机器人反馈的数据,满足性能指标7要求。

图9 机器人远程操控测试
为了验证机器人足掌模块的可行性,同时验证采用该足掌模块的机器人系统进行大负载仿生攀爬的可行性,对由攀爬前体(本文所述机器人)和负载本体组成的机器人系统进行攀爬测试,如图10所示。测试证明,该欠驱动足掌模块和仿生式机器人系统攀爬是可行的。
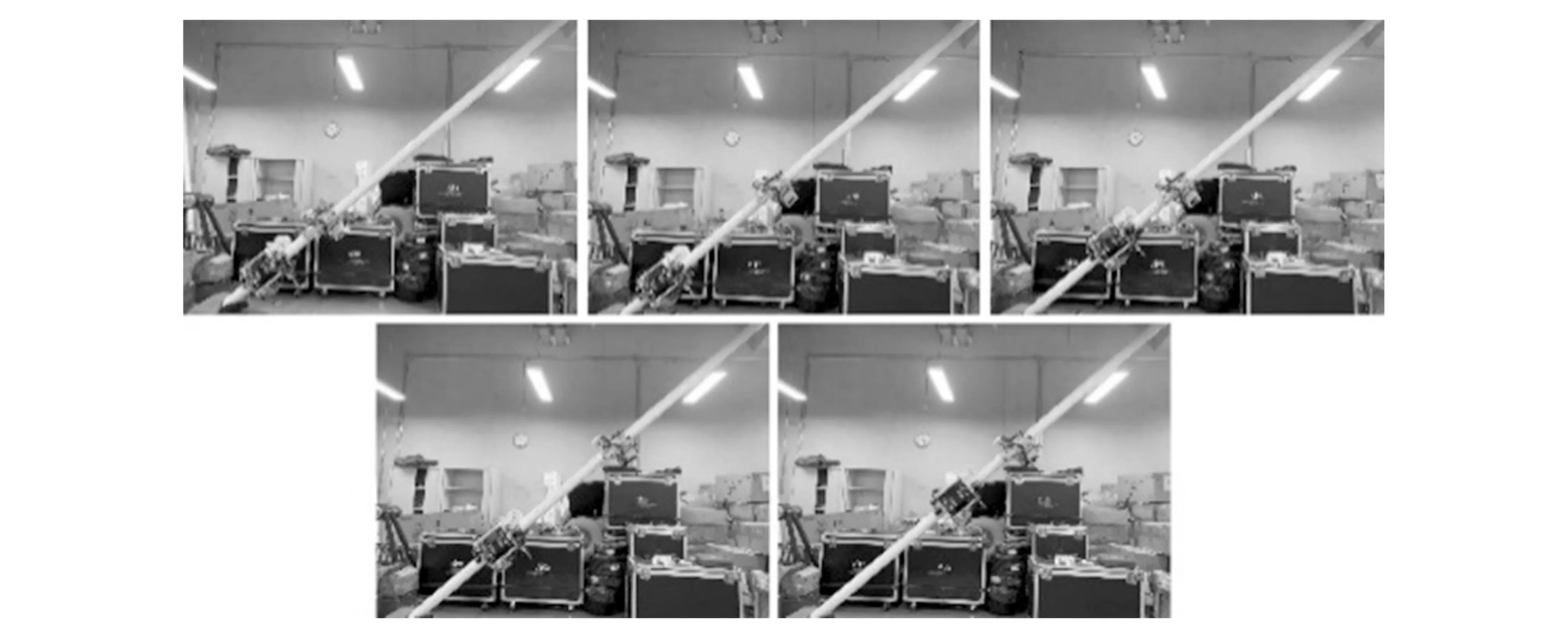
图10 仿生机器人系统攀爬
4 结束语
本文研制的拉索机器人可以适应宽范围直径拉索的攀爬,汲取了轮式拉索机器人速度快和足掌式拉索机器人负载大的优点,各项性能指标达到或优于国内外现有拉索机器人的性能指标。有拓展的足掌模块,可以与负载本体组成仿生式机器人系统,使机器人具有更大的负载能力。后续将对机器人进行优化,提高机器人的安装便捷性;搭载视觉系统,可以对拉索进行表面缺陷视觉检测;设计带有漏磁检测、清洗、修复等大质量设备的负载本体;研究机器人如何进行拉索内部检测和修复工作等。
