基于介质声阻抗特性的超声液位测量系统
2022-08-17赵晓阳张会新彭晴晴
赵晓阳,张会新,陈 航,彭晴晴,严 帅
(1.中北大学仪器科学与动态测试教育部重点实验室,山西太原 030051;2.北方自动控制技术研究所,山西 太原 030006;3.北方宇航系统工程研究所,北京 100076)
在工业生产过程中,基于一些液体具有高温高压、易燃易爆、挥发性和强腐蚀性的特性,对大型的密闭容器,液位监测的环境要求和适用性越来越高[1-3]。常规置于容器内的测量仪器需要预留特定安装位置和计算发射和接收的角度[4],由于检测仪器与液体的接触会缩短仪器寿命,污染被测介质[5],测量安全性和可靠性不高。非介入式超声技术由于其原理简单,维护成本较低,方向集中还有环境适应性强的优势被广泛应用[6],可以实现真正的非接触式液位测量[7]。
随着工业自动化非接触式测量技术的创新,该文设计了一种贴壁移动式液位测量系统,利用密闭容器内壁与不同介质的接触面声阻抗系数存在差异的特性[8],通过分析超声波探头接收内壁反射的回波信号强度来定位气液分界面[9]。
1 声阻抗法测量原理模型建立
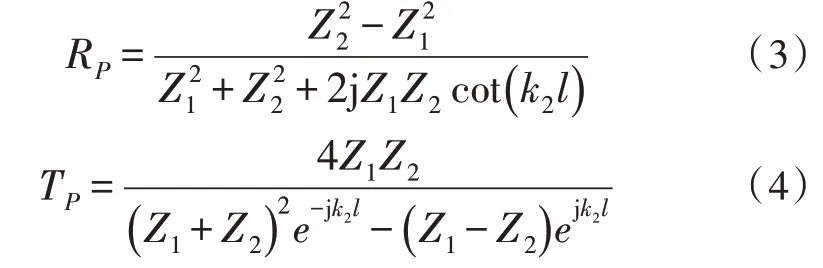
按照图1 所示,当超声波沿着介质1 表面垂直入射时,其中,PT12为介质1 透射到介质2 中的能量,PR23为介质3 反射到介质2 中的能量,基于能量守恒定律,入射超声波声束集中性很强,介质内部传递衰减的能量PT12与PR23可以被忽略,其在两种不同介质接触面的反射波总能量PR12和透射波总能量PT23之和为入射波能量P。由声阻抗的计算公式Z=ρc,其中ρ为介质密度,c为介质内传播声速,可知固、液、气三种介质的声阻系数由强变弱,故发射同等能量的入射波在固气接触面的反射回波能量比固、液接触面大得多,利用x=a和x=b介质接触面处的声压和法向振速连续的边界条件[10],以介质2 为空气为例,声波的反射强度系数RP和透射强度系数TP计算公式如式(1)和式(2)所示,公式中k2=2π/λ2,λ2为介质2 中的声波波长,Z1、Z2、Z3分别为介质1、2、3的阻抗系数。
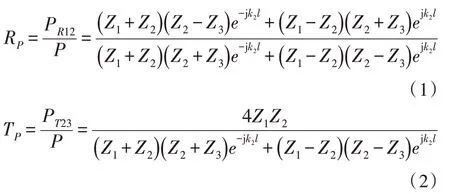
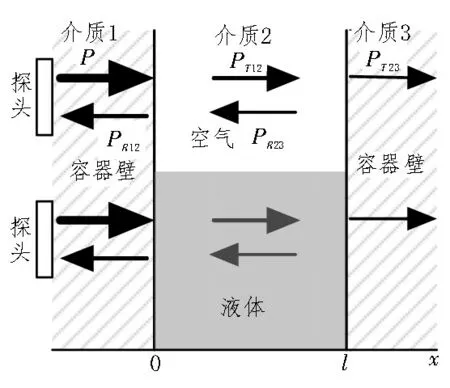
图1 声的反射透射特性
当超声波沿着密闭容器外壁垂直入射时,在相邻接触面经过多次反射,其外部探头接收到的能量主要是在两处容器内壁接触面的反射回波。由于实际容器的介质1 和介质3 的声性材料一致,于是由式(1)和(2)进行推导分别可得式(3)和(4)。当中间介质宽度l和容器壁声阻抗系数Z1固定时,由于气液介质的阻抗系数差异较大,并且如果容器半径足够大,透射波能量很难用传感器接收到[11],故设计使用接收内壁反射回波强度来测量液位。
由声场特性可知,超声波声束在介质中垂直入射传播时会存在远近声场分布,波束刚开始是以柱状方式进行传播,随着距离增加开始逐渐呈发散的形式继续传递,最终辐射的波束在横截面上会得到一个圆形的声场区域[11]。液位测量原理如图2 所示,其中,P1、P2分别为容器壁与气体、容器壁与液体接触面的反射回波能量。将测量使用的圆形探头沿着容器外壁底端自下而上测量过程中,在液位附近会存在两个临界值,第一个临界值返回的声波强度为从稳定到开始突变的位置,第二个临界值为声波强度由大幅度变化到平稳的位置,由介质对称性可知其液位值在两临界值的中间某一状态。
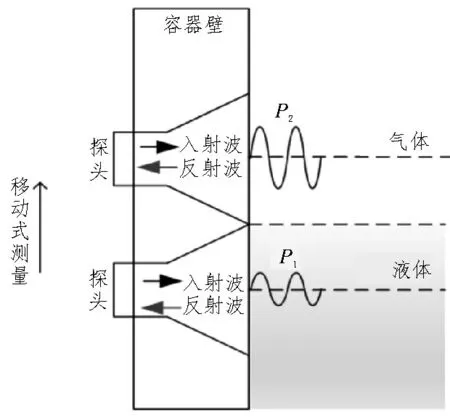
图2 液位测量原理
2 硬件电路设计
如图3 所示为超声波硬件总体设计流程图。由于持续时间极短的脉冲信号尖峰很容易被识别[12],其在超声波传播时延方面的测量精度比较高[13],故系统采用振荡电路驱动产生高频信号,经过信号放大驱使换能器发射超声波;回波经过调理放大和峰值检波处理后,通过FPGA 最小系统控制A/D 进行模数转换;USB 通信上传至上位机进行数据处理,通过程序分析并计算显示液位高度[16]。
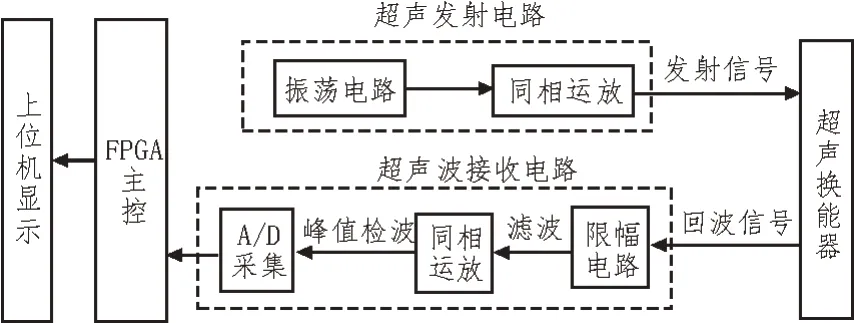
图3 系统硬件总体设计流程图
2.1 超声波驱动电路设计
电容三点式振荡电路稳定性相对较高,输出波形理想,适用于高频兆赫兹级别以上的波形设计。利用电容和电感的储能特性,使得电能在两者之间相互转换,但是所有电子元件都会有能量损耗,需要通过晶体管对振荡信号进行幅值补偿输出稳定的高频信号。
振荡电路设计如图4 所示,C1、C2和L1组成并联谐振回路[17],作为晶体管2N2222 的交流负载。其中C2为正反馈端;R1、R2为放大器分压式直流偏置电阻;R3为直流负载电阻;R4为发射极负反馈电阻,可以有效提高晶体管的稳定性;C3起到旁路电容的作用,使发射极交流信号导通到地;C4是耦合电容,防止电源和基级导通。
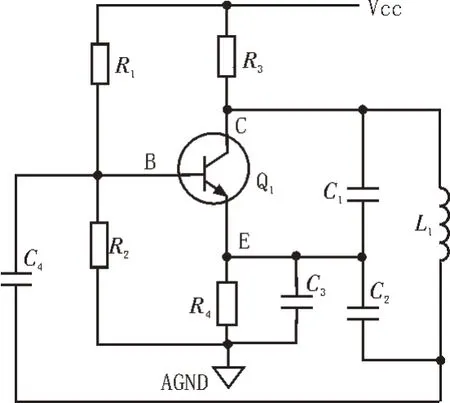
图4 振荡电路
电路核心工作原理:上电瞬间,电流信号比较微弱,随着三极管对信号的不断放大,输出的高频信号中包括很多不同频率的谐波。振荡电路中由C1、C2和L1组成的回路具有选频功能,当其固有频率等于某一谐振频率时,电路产生自激震荡,通过晶体管放大和正反馈调节振幅增大。当增大到一定程度,晶体管进入非线性工作状态,自给偏压变大,反馈系数F≈C1/C2,当F大于等于1 时,振幅达到稳态[13],其电路的谐振频率公式:
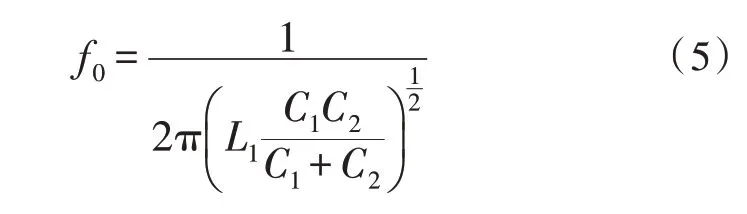
可知相同谐振频率下,选频特性的好坏主要取决于容抗元件C1、C2和电抗元件L1的参数选择,经过计算与参数调试,选取C1=C2=12.6 nF,L1=4 μH。电路采用+10 V 供电,最终自激振荡电路产生频率为1 MHz,幅值有效值为±4.3 V 的连续正弦波,如图5 为振荡电路波形仿真结果。随后经过同相运放AD818放大电路,将电压幅值放大到±10 V。
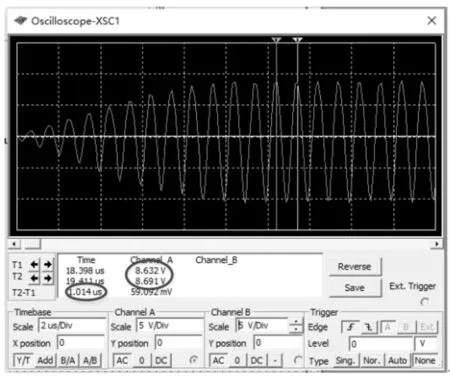
图5 Multisim仿真波形
2.2 超声波回波调理采集电路设计
回波接收调理电路如图6 所示,D2和D3构成二极管限幅电路,消除接收回路中的高幅脉冲干扰[15];电阻R9对回波中携带的低频噪声起滤波的作用。放大电路使用的AD818 是一款双电源供电±5~±15 V,具有300 kΩ高输入阻抗和130 MB 高带宽的高速同相放大器,其电压增益计算公式为Au=;二极管D1和电阻R10,电容C6构成的峰值检波电路,利用二极管单向导通性和电容充电快放电慢的特性,输入电压可以迅速提升至峰值并保持相对稳定[16]。
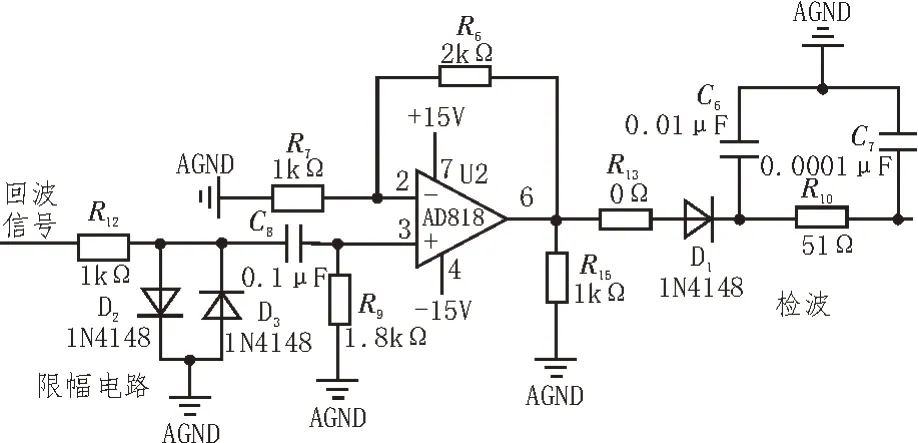
图6 回波接收电路
图7 为回波峰值采集电路。由AD7667 和外围滤波配置电路组成[11],AD7667 前端选用跟随放大器AD8031 稳定输入电压,提高了采集信号的信噪比[17]。ADC 工作主时钟由晶振80 MHz 经FPGA PLL 分频提供54 MHz 主频率,经过跟随的模拟电压进入0~2.5 V的模拟输入端。
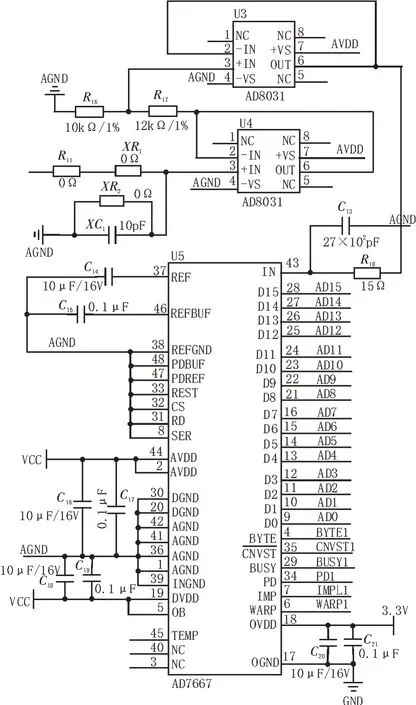
图7 峰值采集电路
转换时序如图8 所示。信号上电开始采集,CNVST 信号下降沿开始启动转换,转换开始BUSY拉高一直保持到转换结束,监测到BUSY 下降沿开始取数,取数完毕之后,在CNVST 下一个下降沿来临时进行下一个采样周期。
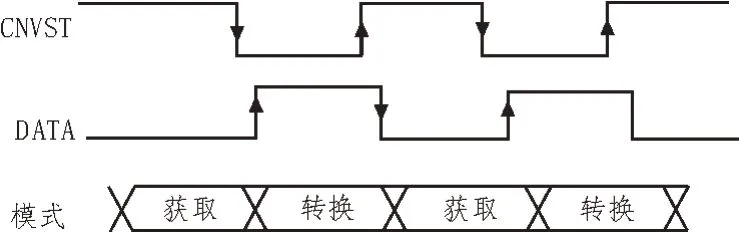
图8 AD7667时序图
3 测试结果和分析
为了验证液位测量原理的可靠性,具体的实验影响因子如表1 所示。实验操作时需要将探头与容器壁之间利用医用耦合剂进行紧密衔接,主要是防止渗入空气降低测量精度并且增加超声波能量的透射强度[18],同时要保证探头均匀受力并沿着容器外壁缓缓移动,观察回波信号强度的变化。实际液位测量实验现场如图9 所示。
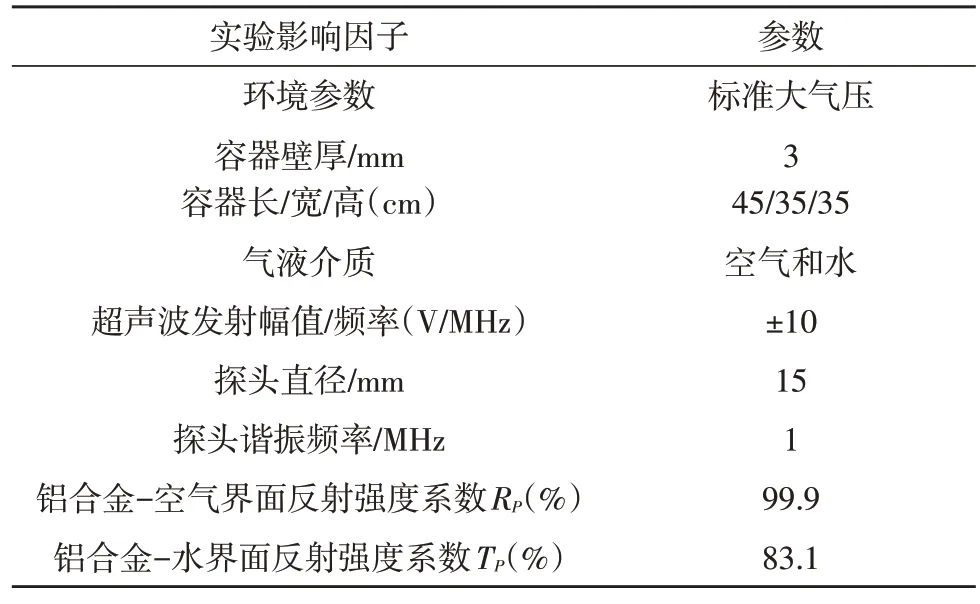
表1 实验参数选取
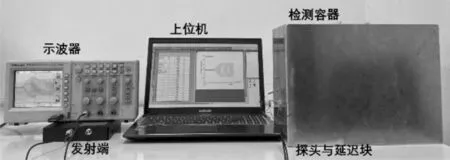
图9 液位测试实验现场
容器内外壁都标有刻度值,当液位位于刻度值17 cm 的位置时,探头在液位上下各1 cm 的位置每移动0.5 mm 记录回波强度变化过程。如图10 所示,点线图中的数据均为3 次测量回波检波信号的平均值,通过分析回波强度不难发现探头自下而上移动过程中,随着固气接触面面积逐渐增大,来自空气中的反射回波能量明显增强,在液位附近会存在两个阈值,最小和最大阈值分别在21 cm 和14 cm 附近,其液位值近似为两个临界位置的中间值。图11(a)~(c)为回波在3 种临界位置处的回波信号幅值,横轴为时间轴,纵轴为检波电压峰峰值压差,通过对比可以明显观察出探头与不同介质接触面面积不同,回波强度差异明显。
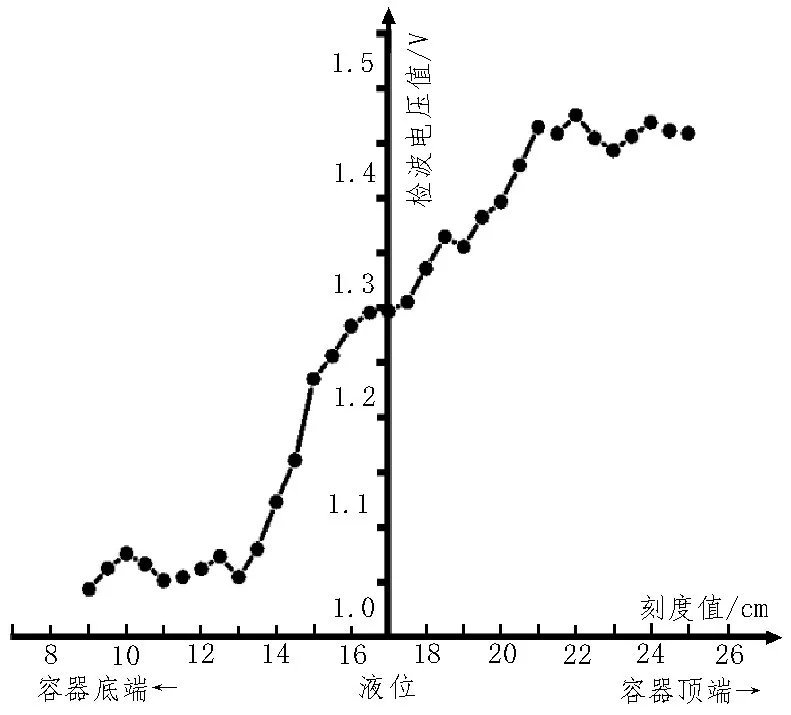
图10 回波强度变化曲线
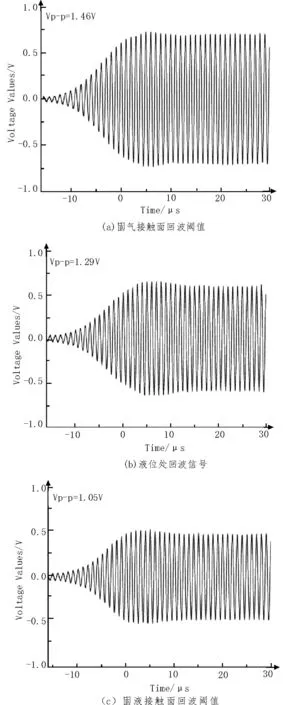
图11 临界位置处回波波形
实验中选取不同液体验证对不同气液介质界面的测量精度,结果如表2 所示。实验所选气体介质为空气,液体介质分别取水、丙三醇、甘油三醇3 种介质。表中液位测量结果为3 次液位测量值的平均值,经过多次液位测量,精度误差控制在3 mm 以内,可以较高精度定位液面位置。
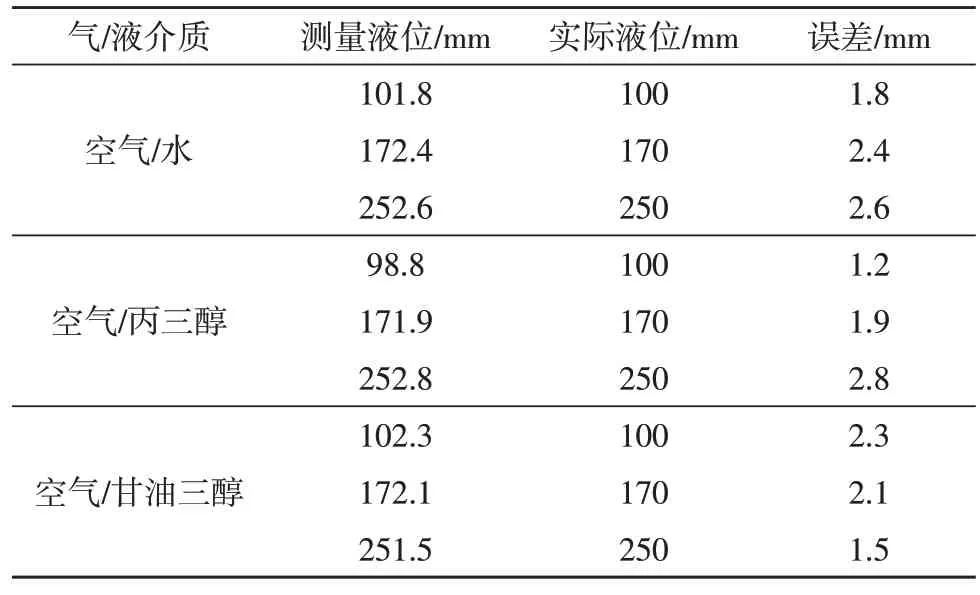
表2 实验测量数据
4 结论
该文中通过采集超声波在两种介质接触面反射回波信号的强弱设计了一种外部感应式液位测量系统,该系统硬件电路设计原理简单且易实现,并对其进行了原理性和精度验证,为工业化工,航空航天领域封闭式液体容器的实时监测提供了重要的参考和实用价值。
