探究6 轴工业机器人的奇异点规避与轨迹规划方案
2022-08-17周家俊
周家俊
(广州数控信息科技有限公司,广州 510530)
0 引言
工业机器人通常是指作用于流水线生产的机械臂,其是通过铰接刚性构件来串联装置,并在生产过程中实现自动化作业。和传统的设备相比,工业机器人具有高灵活性、强通过性等优点,在各种重复性、危险性劳动中能发挥更大的价值。工业机器人是取代低端劳动力,实现工业产业全面进步的关键,而为了提升工业机器人在生产过程中的效率和质量,加强对奇异点规避与轨迹规划设计就成为需要重视的部分。
1 6 轴机器人的运动学分析
机器人的基础架构由行走装置和作业装置2个部分组成,行走装置包括了机械腿、履带和轮系,而作业装置包括了人工手、末端执行器以及机械手,常规的工业机器人基本控制回路为“传感器-控制-执行器-机器人”循环模板。
近些年,Java、现场通信总线等软硬件技术逐渐成熟,这为设计人员将人工智能算法加入到机器人的控制系统提供了渠道,常用的轨迹规范算法为人工势场和神经网络算法2种。人工势场法由斯坦福大学的Khatib教授提出[1]。这一方法的思路是根据在作业区域中设计抽象人工引力场,从而为机器人的运动范围创造近似物理电场的吸引力排斥力,其具体思路见图1。
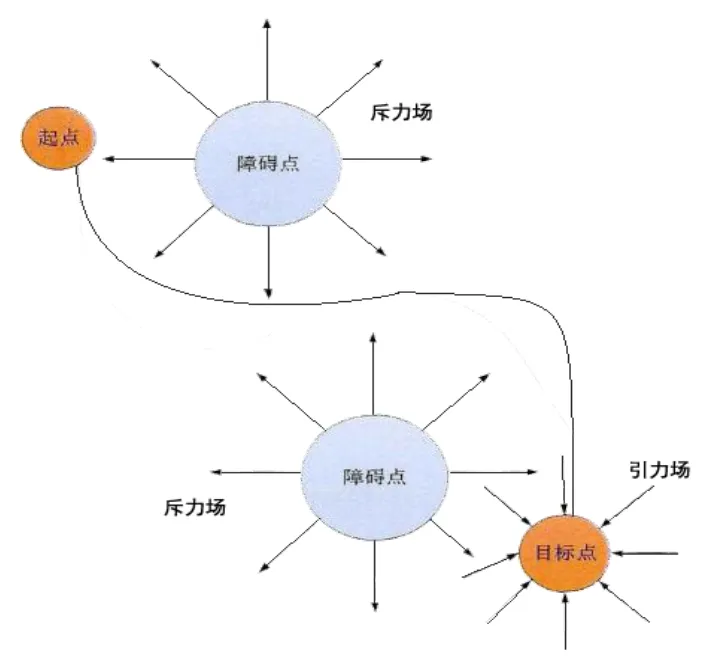
图1 人工势场法简化图

sigmoid函数进行计算,通过计算取得隐层结果,将取得的隐层结果转化为下一感知器的输入层,通过这样一层一层的类推,最终获得输出层。神经网络算法相对于人工势场的优势在于该方法具备自学习的特点,但是随着我国工业生产作业环境的复杂化,在运用神经网络算法的过程中往往会出现大量的误差堆叠,一但隐层过多,在运用神经网络算法做避障处理时,就会带来过高的维数,这就让后期学习的过拟合被增大,在运动扰动及精度上出现不足。
2 轴工业机器人奇异点规避与轨迹规划方案
2.1 6 轴机器人的奇异点
奇异点是引发工业机器人失速的主要原因,当机器人进入某种特殊状态时会造成无法准确获得速度方程的雅可比逆解矩阵的解数,这就会引发失速问题[3]。工业机器人一般腕部奇点、肩部奇点和肘部奇点这3种类型奇异点位置,3种类型奇异点位置的具体分布见图2。

图2 工业机器人3 种奇异点示意图
在工业机器人作业过程中,末端执行器的速度以及角速度会和关节速度产生矩阵映射,即雅可比矩阵,见式(2)。
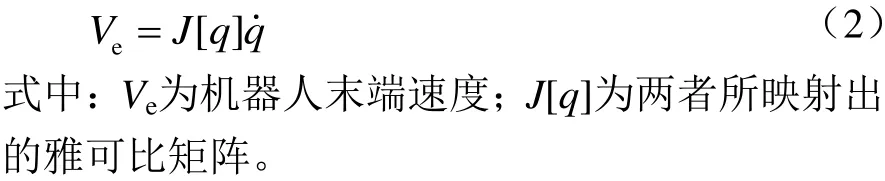
而6轴机器人中,Jp[q]为关节速度对末端线速度以及末端速度的3n作用矩阵,因此在6轴机器人的J[q]中,矩阵行数是工业机器人在笛卡尔空间坐标系中的自由度数目,即机器人的关节数量和矩阵列数相同。结合图3所示,两连杆关节轴连接的连杆偏距,将连杆i和转动关节i相对i-1的绕坐标系i的z轴所作微分记为转动dθ,由此便可得到转动关节i相对基坐标系的J[q]。

图3 连杆偏距示意
2.2 奇异点的规避算法
通过上述公式以及针对奇异点的分析示意图可以知晓,在6轴机器人的作业过程中,之所以会产生奇异点,主要原因是由于在雅可比矩阵对6轴机器人的速度逆解进行计算时,此时因为机器人处奇异位而造成了动力学逆解的不可解,这种情况下便引发了速度丢失这类问题。对针对6轴机器人的失速问题,根据周辉教授提出的马尔科夫思想计算方式来实现对机器人运动路径的筛选[4]。该轨迹规划方案是结合机器人在作业时可能会产生的奇异点以及这些奇异点的产生位置,将这些位置用马尔科夫思想筛选出避开奇异点区域的路径,实现对失速问题的有效处理。
而根据方案设计目的,该奇异点规避方法至少要完成以下几个目标:1)利用对6轴机器人速度雅可比逆解结果的有效监控判断机器人运动时有没有抵达奇异点区域,并规避这一特定点位,同时调用位置传感器以及角度传感器监控机器人运动环境中,存在于外部环境的障碍物点位信息,进行合理的轨迹规划;2)使用贪婪决策进行轨迹规划,通过对特定点进行规避实现机器人运动过程中避开奇异点的目的,在运动策略的选取上以平滑改变运动方向和缓和实现运动速度突变为主。
结合以上目标,故采取动态规划来进行6轴机器人的奇异点规避,使机器人在采取贪婪策略规划轨迹之后,不会出现太大的运动速度及方向突变,达成6轴机器人有效实现对奇异点规避的同时,运动曲线中的奇异点波动也能得到充分改善。根据6轴中关节转角和速度间的关联性,为6轴机器人设计迭代速度的牛顿迭代算式为
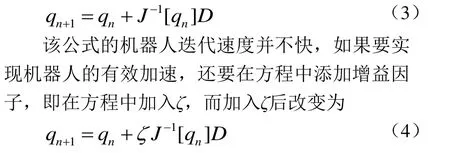
6轴机器人在进行逆解求解时,因为会将n次求解得到的结果作为n+1次的迭代初值,以此确保可以在不断迭代的过程中,达到误差允许范围,让迭代初值可以最大程度地接近精确解[5]。该算法的原理在于对机器人的运动区域划分出了奇异区域和非奇异区域两个区域,奇异区域指奇异点附近区域,而此外的区域都属于非奇异区域,在机器人运动时,根据所在区域的不同,可以采取不同的调整策略来实现奇异点规避,例如在运动至非奇异区域内时,通过加入增益因子ζ的牛顿迭代法进行运动学逆解变换,本来属于末端的坐标系位移换算为所有关节位移,并对机器人速度逆解中的雅可比矩阵状态进行实时计算,在计算时可以将阀值设置为0,根据|J[q]|是否为0决定操作方案,若为0则按逆解操作继续执行,若不为0则根据优化的牛顿迭代法中提供的马尔科夫模块挑选可能存在的运动路径。
在常规状态下,机器人在正常区域运动时,运动速度和加速度取向呈现为平滑曲线,但因为奇异点会造成机器人失速,令激变现象出现在对应的速度曲线上,因为程序会出于对机器人运动轨迹插补的需要设置一判断语句,但当机器人进入奇异点区域后,仍然会因为逆解无解等原因出现停机,而运用上述算法进行机器人运动轨迹方案改进后,机器人在奇异区域的速度激变问题能得到有效抑制,确保机器人的运动速度平稳过渡,同时在趋于奇异点区域时,就可以通过绕行的方式避开障碍点,实现成功避障,为作业效率的增强和作业质量的保障提供良好的技术支持。
2.3 奇异点规避的系统设计
在机器人的运作系统中,系统后端的单片机是重点,其结构较为单一、处理速度快捷、功能强大,经过模块化的管理,可优化系统功能,单片机是一种常见的嵌入式微控制器,由运算器、控制器、存储器、输入输出设备组成。TCP和IP是确保信号传输的关键,TCP/IP协议是联结网络的重要协议,这些网络协议的作用在于高速传输数据,TCP/IP协议层由应用层、传输层、网络层和网络接口层构成。机器人作业的指令只在特定范围内发送,所以在在单片机上选择嵌入式TCP/IP协议,主要包含硬件的实现、系统软件。把两者予以嵌入式结合,可优化系统,实现机械臂在作业时的智能化。
系统设置有多个接口连接网络,具有多个串口供操作者使用,系统可迅速解包IP数据,并传输到串口,外部RAM可采用61C1024时,获取最大的缓存,采用X5045把机器人的物理地址、信号传输及作业过程相关数据全部保存下来,并把串口传输的数据予以封装,以数据包的方式传输到后端系统中。网卡芯片选择拥有八位或十六位接口的硬件,同时脉冲变压器要测试其是否可以顺利实现脉冲波形变换网络信号。单片机是系统的中心,在设计操作机器人系统时,要采用以太网对芯片进行控制,进而实现机器人作业过程中的智能化操作。在设计机器人系统中时运用X5045进行外部扩展,将物理地址、网卡地址等相关配置信息予以全部保存,对机器人运行进行监控,若出现失速等状况,便结合优化过的牛顿迭代法迅速调整机器人移动轨迹,令其进行复位或者改变运动轨迹的操作,以实现良好避障。
3 结论
机器人的避障问题是轨迹规划过程中需要格外重视的地方,若无法有效处理奇异点区域所造成的运动失速现象,将会对机器人作业生产的效率和质量造成负面化的影响。在本次研究中,针对过往的机器人运动规划方案进行了分析,指出这些方案的优势和不足之处,并结合6轴机器人的雅可比矩阵特征设定了对应的规避算法及算法应用流程,为6轴机器人对奇异点的有效规避提供了具有可行性与实践性的方案模板,同时也为6轴机器人在生产作业中更好地发挥作业效率予以了良好的技术支持。
