永磁同步电机控制系统电流采样误差的研究
2022-08-17王俊炎袁鹏飞陈宏伟
王俊炎,袁鹏飞,陈宏伟
永磁同步电机控制系统电流采样误差的研究
王俊炎1,袁鹏飞2,陈宏伟2
(1. 海装武汉局驻武汉地区第三军事代表室,武汉 430070;2. 海军工程大学,武汉 430033)
在对电机振动噪声要求较高的场合,实现电机转矩的精确控制,精确的电流控制是关键,而不可避免的电流采样误差会影响控制精度,引起不必要的转矩和转速波动。针对此问题,本文以典型的永磁同步电机控制系统为研究对象,对电流传感器可能产生的电流采样误差进行了分析,将误差引入系统控制模型,实现了精确的误差分析建模。依据此模型分析了采样误差对系统运行造成的影响,并进行了仿真。根据仿真实验结果和理论计算结果对比可知,二者有高度的一致性,验证了所建立模型的准确性。
永磁同步电机 电流调节器 采样误差
0 引言
典型的永磁同步电机的控制环节通常包括:电机控制基础内环、最大转矩电流控制(MTPA)与弱磁控制、转速与位置控制等。其中电机控制基础内环(简称基础内环)是其中最基本的组成部分,其性能决定了电机控制系统的转矩暂态和稳态性能。基础内环中,反馈电流检测是其必不可少的检测环节,是电流控制、电压估计、速度和位置估计的根本状态量,精确的电流检测有益于减小低频的转矩脉动[1, 2]。
在电流调节器的研究中,通常认为采样电流为实际电机电流,再对采样电流进行闭环控制。然而实际应用中,由于电流传感器的非线性和温漂等现象,采样系统总是存在误差的,该误差包括电流传感器的误差、调理电路的误差;这些误差都会造成采样电流与实际电流的偏差,使得逆变器的输出电压指令偏离所需的电压值,从而造成电机电流的畸变,产生非必要的转矩波动。在实际系统中,这两种误差往往同时存在,无法分离开,但从测量信号的角度,可将不同环节的误差对电流采样的影响统一等效为偏置误差和线性增益误差,从而简化分析过程。
国内外许多学者分析了电流采样误差对控制系统的影响S. Seung-Ki等人假设三相实际电流为理想电流,在此基础上分析检测电流的误差[3-5];Q. N. Trinh等人则在并网应用中分析电流采样误差的影响[6, 7]。对于实际系统,由于采样电路和电流传感器的温飘等现象,采样误差会随着时间变化,S. Seung-Ki等人建立的采样误差分析模型不够精确,该模型假设实际三相电流为理想电流,这与实际情况不符;Q. N. Trinh等人所建立并网误差模型并不能很好的适配电机控制系统,二者存在差异。
综上所述,虽然已经有学者提出电流采样误差的分析模型,然而这些分析方法与实际物理模型存在较大的偏差,难以实用。因此,如何建立更加精确的电机采样误差的分析模型是本文的研究重点。
1 采样电流的精确模型
电流检测环节的误差主要由传感器检测和调理电路两个环节所造成,在进行误差分析时可统一考虑。通常误差呈线性分布,可以分为偏置误差和线性增益误差,两种误差分开进行讨论,然后通过叠加原理,计算总误差值。电流传感器偏置误差和增益误差示意图如图1所示。
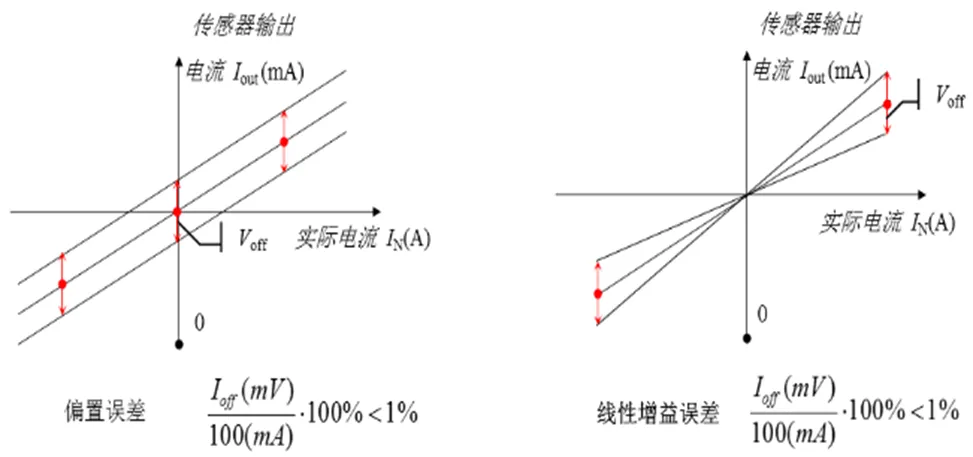
图1 电流传感器偏置和增益误差示意图
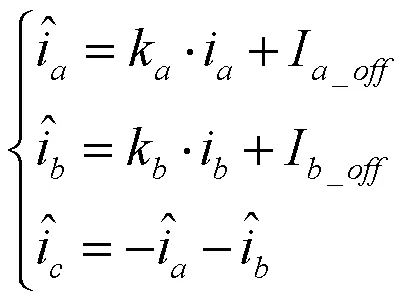
根据图1的误差定义,电机的三相绕组通过电流检测得到的反馈电流可表示为:
1.1 交流电流检测误差至同步坐标系的映射
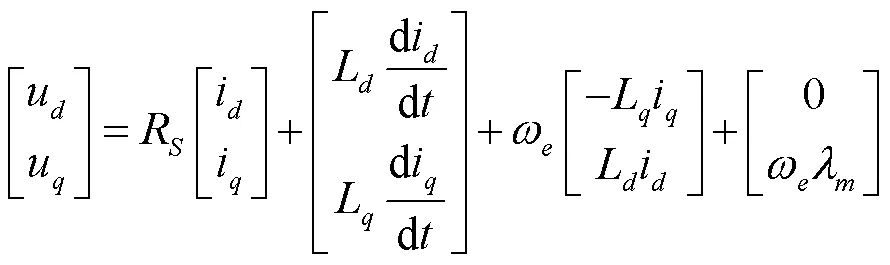
永磁同步电机在其坐标系下的数学模型为:
则检测电流从三相静止坐标系到两相旋转坐标系的映射关系为:



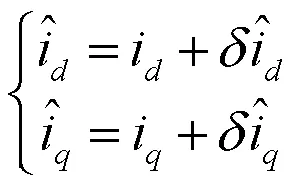
则电机轴电流误差值可表示为:
1.2 d、q轴电流误差对控制系统影响
考虑dq轴电流误差,典型的永磁同步电机电流调节器框图2所示。
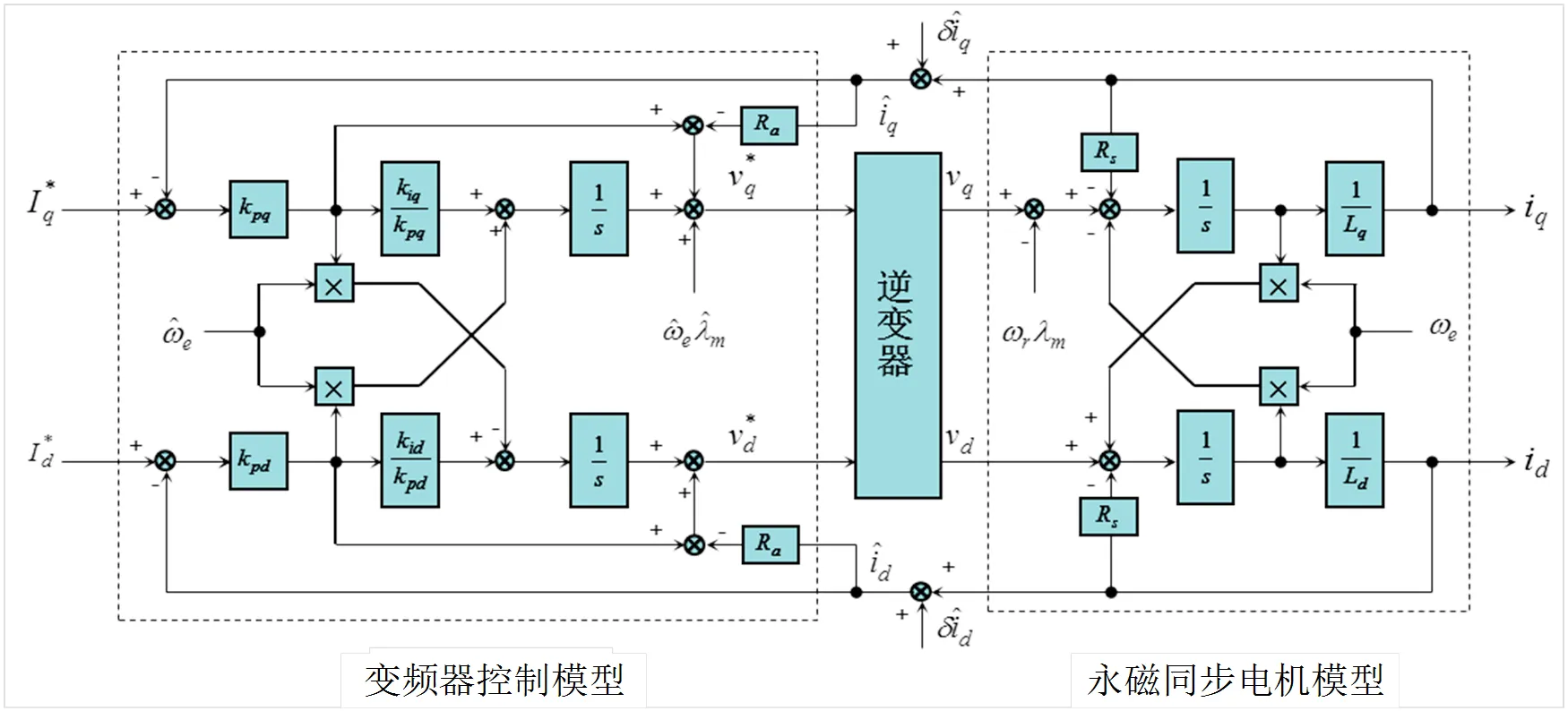
图2 考虑误差的电流调节器框图
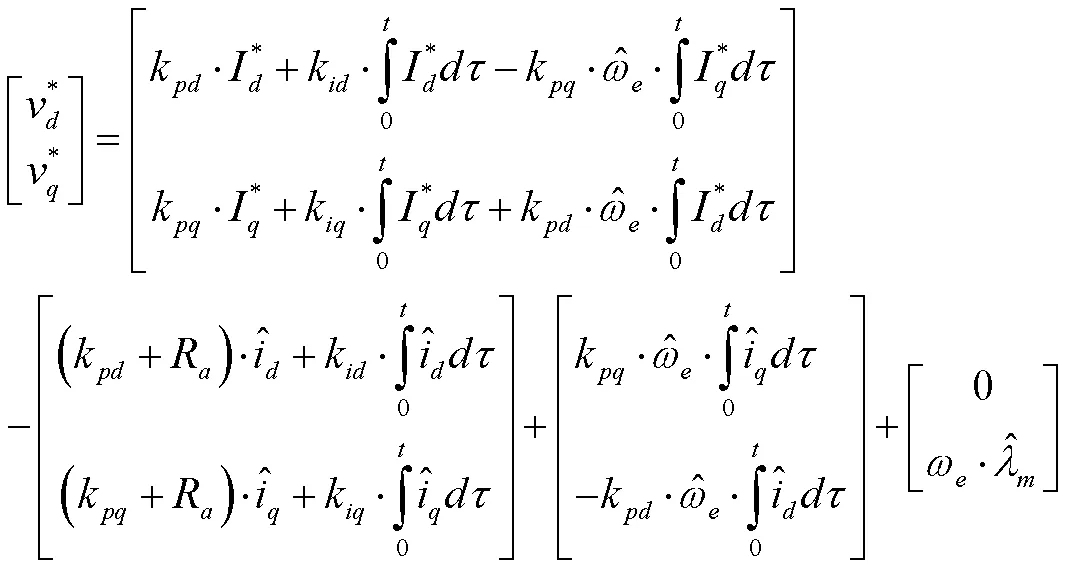
则根据电流调节器框图,变频器控制方程可表示为:
电机方程如式(8)所示:

在进行系统闭环传递函数推导前,先进行如下假设:
1)忽略逆变器的非线性特性;
联立方程(7)和(8)解得系统的闭环控制微分方程为:
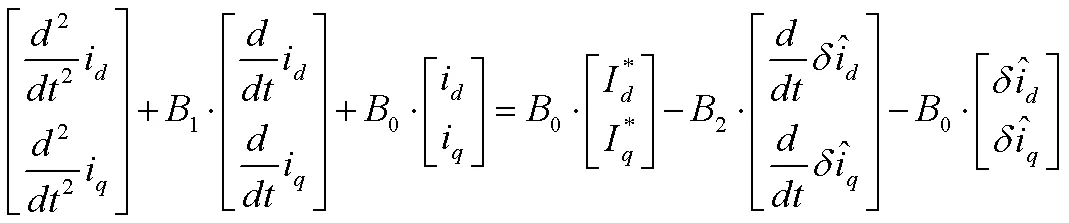
其中:
电流指令相关项闭环控制方程:

误差相关项闭环控制方程:
由于本文主要讨论传感器电流误差对系统的影响,而方程(10)为没有误差情况下系统的闭环传递函数方程,因此这里就不再深入讨论。方程(11)为误差相关项满足的闭环传递函数方程,转换到S域进行求解,可表示为:

由于方程(12)求解复杂,因此这里做如下简化,取两个PI调节器的参数分别为:
此时,控制系统在稳态情况下近似为一阶惯性环节。误差相关项同样近似为一阶惯性环节:
1.3 检测电流引起的控制误差

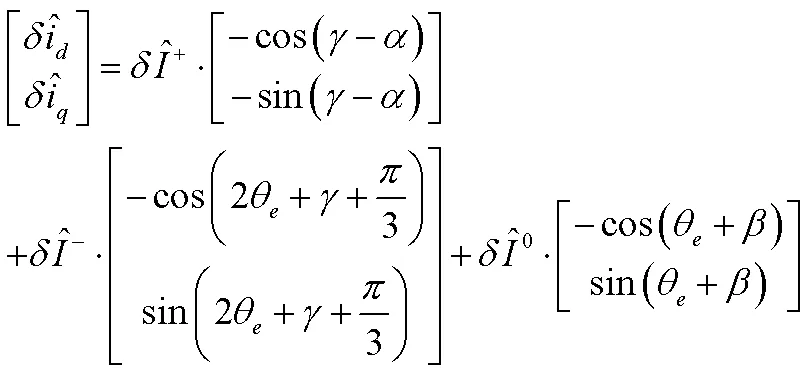
其中:
从上述表达式可以定性的得到结论如下:
1)两个传感器检测电流增益不一致时,会产生负序误差分量;
2)两个传感器检测电流增益不一致和单个传感器电流增益误差均会产生正序误差分量。
3)检测电流越大,误差分量越大,两者呈正比关系。
4)偏置误差只影响零序分量。

图3 不同误差类型导致的d-q轴误差特性分布图
根据线性系统叠加原理,由方程(13)和方程(15)可得:
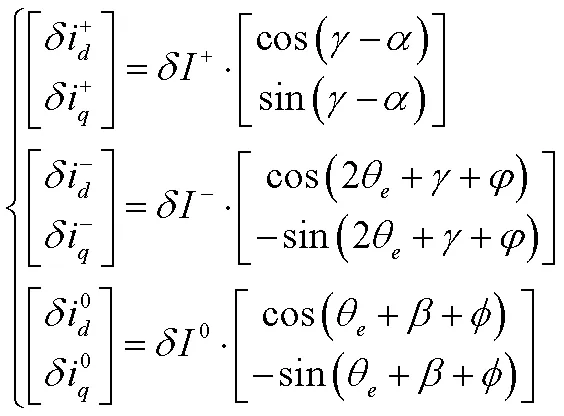
据此,可以得到检测电流引起的误差为:
2 仿真实验

条件1:仿真参数设置如下A相电流传感器增益误差+20%,无直流偏置;B相电流传感器无增益误差,无直流偏置,即:

在条件1的情况下,可以得到仿真波形如图4所示。
条件2:仿真参数设置如下A相电流传感器增益误差+20%,直流偏置10%;B相电流传感器无增益误差,无直流偏置,即:

在条件2的情况下,可以得到仿真波形如图5所示。
图5 误差设置条件2仿真结果
条件3:A相电流传感器增益误差+20%,无直流偏置;B相电流传感器增益误差+20%,无直流偏置,即:

在条件3的情况下,可以得到仿真波形如图6所示。为方便对比,将仿真结果和理论计算值列写为表格的形式,如表1所示。
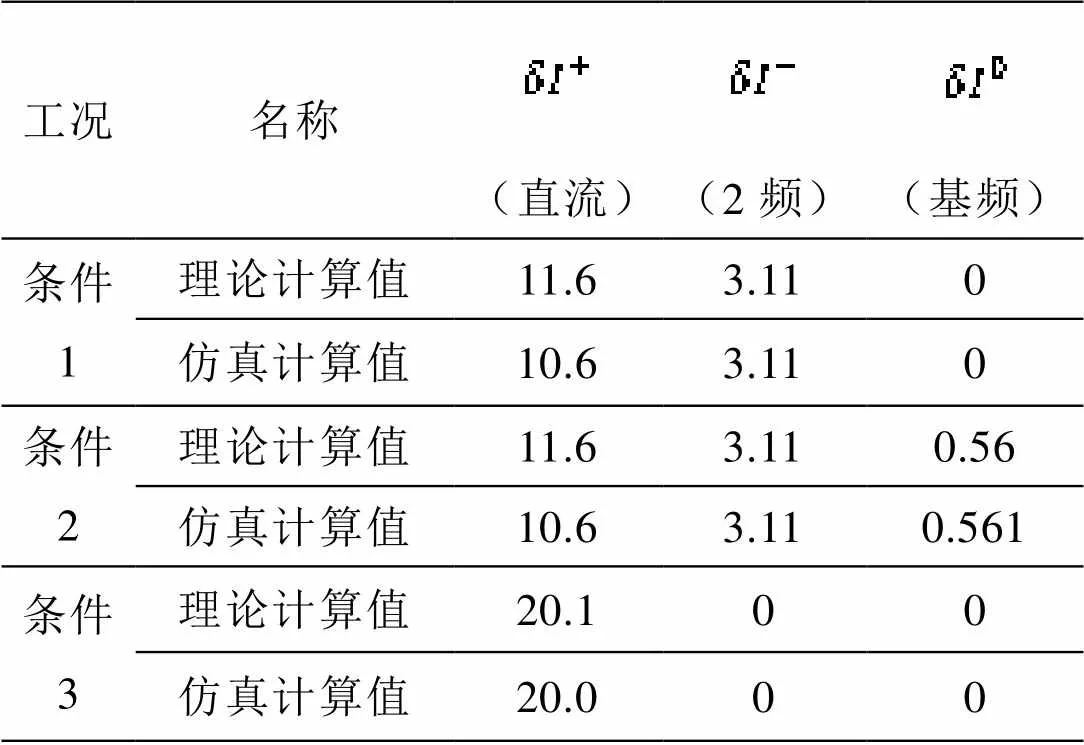
表1 电流检测误差理论计算与仿真对比
由条件1和条件2仿真与理论计算结果分析可知检测电流引起的零序分量的误差只和偏置误差有关;由条件1和条件3仿真与理论计算结果对比分析可知两个传感器增益比不相等时会引起检测电流负序分量的误差。
由表2可知,理论计算结果与仿真结果有一定的误差,这个误差主要是由于在本文分析过程中为了简化分析将典型的永磁同步电机控制系统简化为一阶模型所造成的,但是由表2可以看出理论计算结果与仿真结果误差很小,这也验证了我们所建立模型的准确性以及对模型简化的合理性。
3 结论
本论文在前人的基础上,提出了一种针对永磁同步电机三相电流不平衡的情况下检测电流误差的数学模型。并对此进行了仿真验证,通过仿真验证和理论分析验证了所建立模型的准确性。其不足之处在于本文只对采样误差对系统造成的影响进行了精确的建模与仿真验证,没有提出有效的采样误差的补偿方法,采样误差的补偿方法将是后续的研究方向。
[1] 夏超英, SADIQ UR RAHMAN, 刘煜. 永磁同步电机高速运行时电流调节器稳定性分析与设计[J]. 中国电机工程学报, 2020, 40(S1): 303-312.
[2] 徐成. 提高永磁同步电机控制性能的电流控制与调制方法研究[D]. 重庆: 重庆大学, 2020.
[3] Jang J, Sul S, Son Y. Current measurement issues in sensorless control algorithm using high frequency signal injection method: IEEE, 2003.
[4] Jung H S, Hwang S H, Kim J M, et al. Diminution of current-measurement error for vector-controlled AC motor drives[J]. IEEE Transactions on Industry Applications, 2006, 42(5): 1249-1256.
[5] 蔡志端, 王培良, 荀倩, 等. 永磁同步电机相电流测量误差分析与补偿[J]. 电工技术学报, 2016, 31(23): 22-30.
[6] Trinh Q N, Wang P, Choo F H. An Improved Control Strategy of Three-Phase PWM Rectifiers Under Input Voltage Distortions and DC-Offset Measurement Errors[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2017, 5(3): 1164-1176.
[7] Trinh Q N, Choo F H, Tang Y, et al. Control Strategy to Compensate for Current and Voltage Measurement Errors in Three-Phase PWM Rectifiers[J]. IEEE Transactions on Industry Applications, 2019, 55(3): 2879-2889.
Research on current sampling error of PMSM control system
Wang Junyan1, Yuan Pengfei2, Chen Hongwei2
(1. The Third Military Representative Office of Wuhan Bureau of Naval Armament Department of PLAN, Wuhan 430070, China; 2. Naval University of Engineering, Wuhan 430033, China)
TM341
A
1003-4862(2022)08-0063-05
2022-06-23
王俊炎(1984-),男,工程师。研究方向:舰船电气工程。E-mail: 5707203@qq.com
