水面无人装备联动捕捉机构设计分析
2022-08-17赵明清钱冬林
赵明清,钱冬林
(中船绿洲镇江船舶辅机有限公司,江苏 镇江 212006)
0 引言
近年来,小型无人艇、无人航行器等水面无人装备设备,呈现结构形式越来越多样化、工作使命复杂化、工作海况恶劣化等趋势,因此,如何顺利捕捉无人装备,是整个布放、回收工作的重点。目前,在水面无人装备试验过程中,多采用普通起吊机械,通过定制过渡吊具进行收放操作。收放装置布置在母船上,与无人装备间形成2个六自由度独立运动状态。逐一同步相对运动姿态,可以降低相对运动带来的不利因素,为两者建立牢固连接(成功挂钩、捕捉)奠定基础。在相对运动关系中,深沉(轴)方向的补偿实现的方法有很多,如通过液压油缸行程补偿、恒张力波浪补偿绞车等,故寻求一种有效缓解平面位置差异且兼顾通用适配性的装置是十分必要的。本文以实现功能为目的,从结构组成、工作原理及设计数据分析等方面对水面无人装备联动捕捉机构进行研究。
1 联动机构的主要组成及功能
本文通过对水面无人装备施加运动轨迹及轨迹切线两个方向的约束达到控制水面无人装备平面位置的目的。
联动捕捉机构主要由阻尼系统、侧向夹持系统、控制系统、动力系统等组成,其中:控制系统可集成在无人装备收放装置的总控制器中,运动所需动力也可以由无人装备收放装置的动力源输出。结构组成示意见图1。
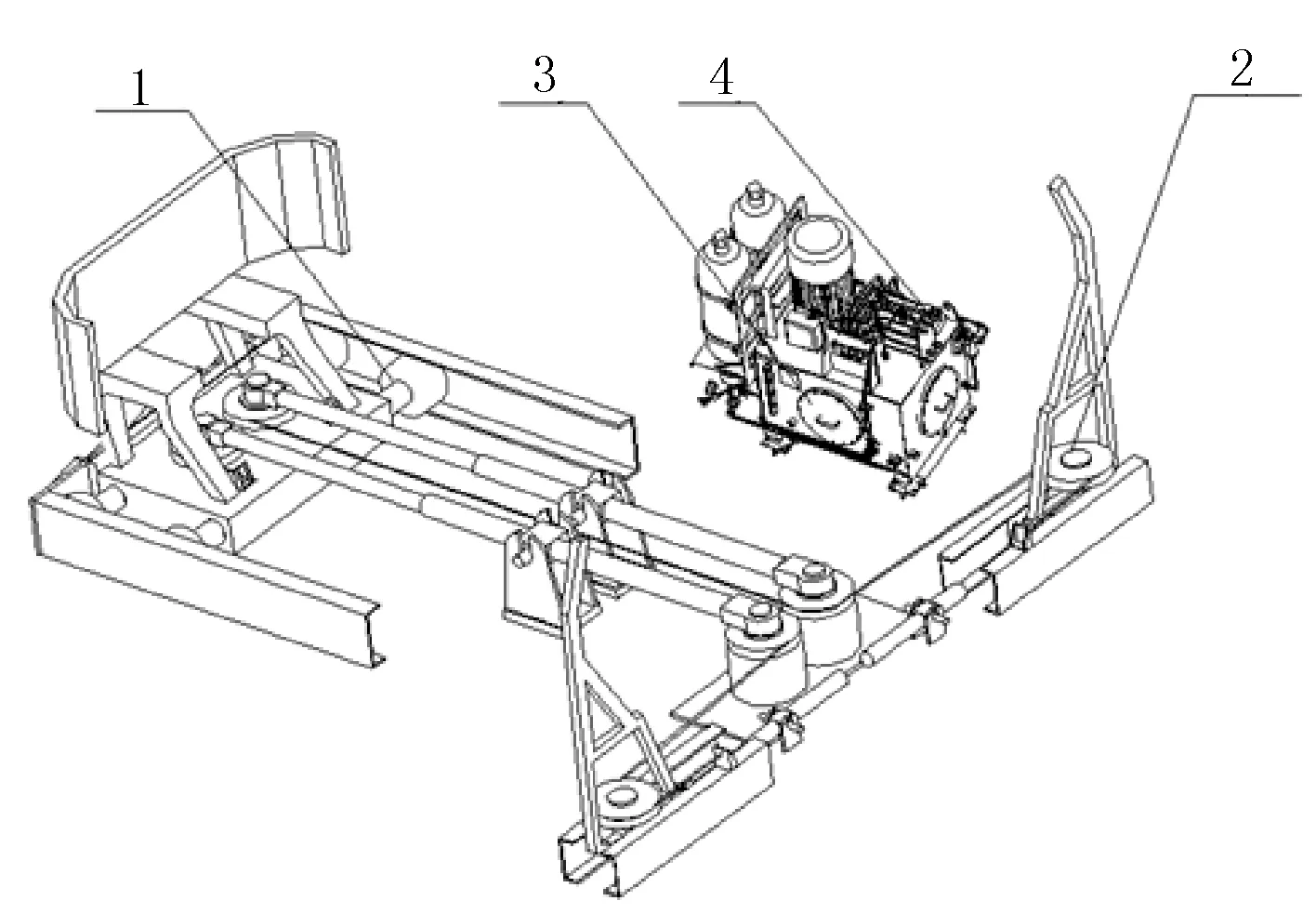
1—阻尼系统;2—侧向夹持系统;3—控制系统;4—动力系统。
阻尼系统可将水面无人装备减速并使其与母船保持航行轨迹相对静止。无人装备由于海浪及进入捕捉区域时的位置偏移,很难保证回收姿态平稳,此时夹持系统可校正无人装备姿态,以确保自动回收前,收放装置的主吊系统或升降系统能成功与无人装备对接。
捕捉机构的缓冲阻尼系统将水面无人装备减速并停止,侧向夹持系统通过钢丝绳和阻尼系统联动,两系统中均包含液压缸缓冲结构。武晓凤在对各种液压缸内置式缓冲结构的缓冲机理分析基础上,指出了环形、圆锥、斜面、固定节流小孔等内置缓冲形式存在速度、载荷、加速度曲线等缓冲不利因素。为此,本文研究的联动捕捉机构采用单向阀、节流阀组合方式,以提升缓冲油缸阻尼效果。
1.1 阻尼系统
阻尼系统主要组成包括阻拦网、阻拦支撑框架、移动滑轮组I、移动机构、液压系统、阻尼油缸、传导钢丝绳,见图2。回收工况时,水面无人装备以一定速度进入捕捉区域,撞击阻拦网,带动移动机构向前移动,同时通过移动滑轮组I推动阻尼油缸活塞杆伸出。阻尼油缸起阻尼作用,为水面无人装备回收提供前进方向的阻尼保障,持续减缓水面无人装备的速度直至与母船保持相对静止。
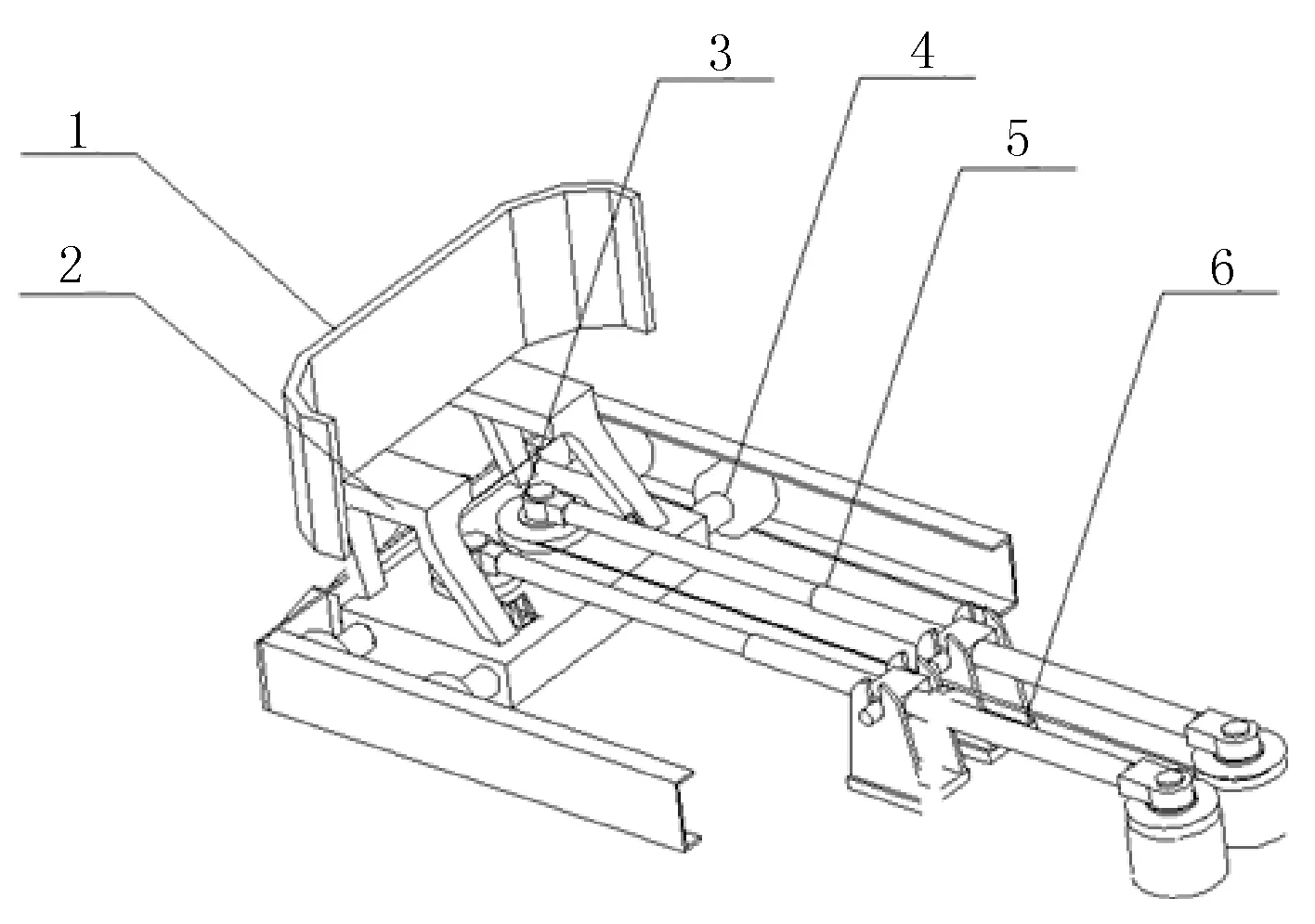
1—阻拦网;2—阻拦支撑框架;3—移动滑轮组I;4—移动机构;5—阻尼油缸;6—传导钢丝绳。
1.2 侧向夹持系统
侧向夹持系统主要组成有夹持支架及基座、移动滑轮组II、侧移机构、夹持油缸、转角滑轮组,见图3。回收工况时,阻尼系统动作通过移动滑轮组I、转角滑轮组和移动滑轮组II传递给侧向夹持系统,实现阻尼系统和侧向夹持系统的联动,有助于更好地校正无人装备的回收姿态,便于后续自动捕捉回收,提高水面无人装备自动回收的成功率。夹持机构成对布置,其底座采用模块化、系列化、通用化设计,通过调整安装位置、更换底座系列,可以兼顾一大部分的水面无人装备通用适配性。
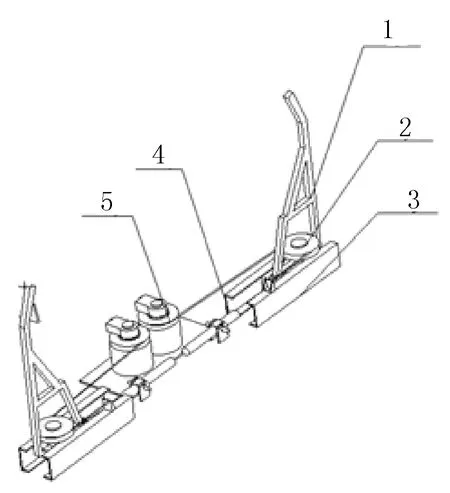
1—夹持支架及基座;2—移动滑轮组II;3—侧移机构;4—夹持油缸;5—转角滑轮组。
1.3 液压系统
液压系统是联动捕捉机构功能实现的动力系统,主要由动力单元、控制单元和执行元件等组成。在回收工况时,联动捕捉机构被动工作,无需液压系统的参与;只有在布放工况时,液压系统作为张开夹持支架及基座的动力。在布放工况时,液压系统给夹持油缸无杆腔充油,推动活塞杆伸出,带动夹持支架及基座外移,保障下一次回收工作正常进行。由于此液压系统简单,可由母船上已有的液压系统辅助提供,无需另外配备。
2 工作原理
2.1 回收工况
水面无人装备以一定的初始速度进入捕捉区域,撞击联动捕捉机构头部的阻拦网,带动阻尼油缸活塞杆伸出。由于阻尼油缸两腔都充满液压油,当活塞杆伸出时,两腔液压油受压,液压油经过节流阀流向1腔。由于节流阀的节流作用,两腔产生一定的液阻力,阻碍活塞杆的伸出,形成阻尼效果,从而使水面无人装备的运行速度平缓过渡至与母船相同状态。阻尼效果可以通过调节节流阀节流口的大小进行调整。
阻尼油缸活塞杆伸出的同时,夹持油缸活塞杆联动缩回。此时,夹持油缸无杆腔液压油受压,经过电磁阀流出,一部分给夹持油缸有杆腔补油。由于夹持油缸两腔面积不同,无杆腔流出的液压油大于有杆腔所需的液压油,多余的液压油流回油箱。其原理图见图4。
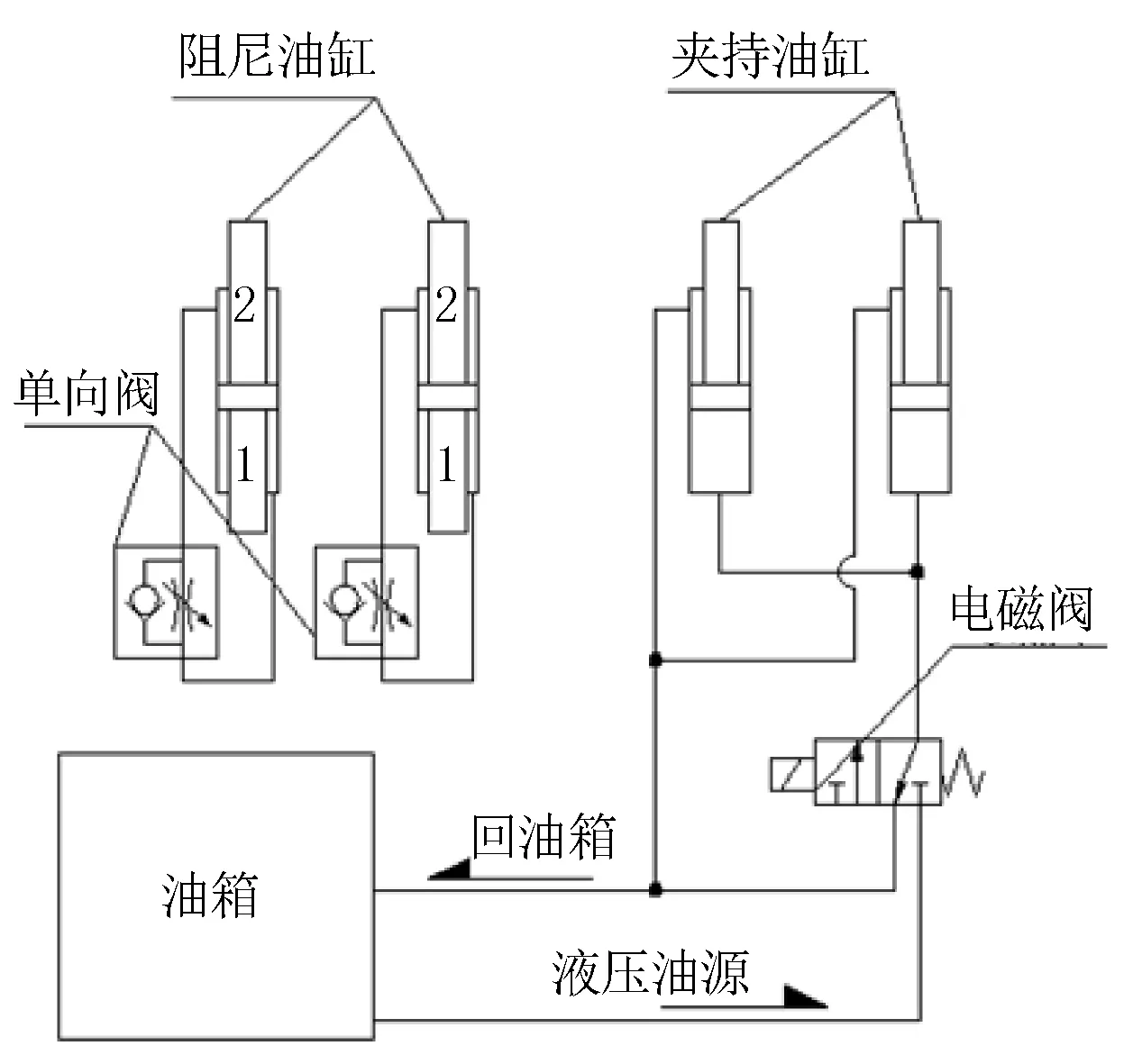
1、2—阻尼油缸的两个腔室。
阻尼油缸为两腔面积相同的形式,且液压缸不存在外泄漏,所以缓冲油缸两腔液压油一进一出,自给自足,不需要外接管路,结构简单,动作可靠。
阻尼油缸可伸缩部分安装移动滑轮组I,固定部分安装转角滑轮组,夹持油缸可伸缩部分安装移动滑轮组II,这3个滑轮组通过钢丝绳连接。所以,阻尼油缸活塞杆伸缩通过钢丝绳带动夹持油缸动作,实现前后左右2个方向上的联动,见图5。
回收工况时,阻尼系统将水面无人装备减速最终与母船保持相对静止的同时,侧向夹持系统对其进行姿态矫正,最终夹紧无人装备,便于后续自动捕捉回收。夹持油缸组在水面无人装备回收工况中,提供阻尼功能;在布放工况中,作为张开夹持机构的动力原件。
2.2 布放工况
回收水面无人装备之后,要将捕捉机构复位,称为布放工况。液压系统提供具有一定压力和流量的液压油给夹持油缸的无杆腔,并切换电磁阀,液压油推动夹持油缸活塞杆伸出,带动阻尼油缸活塞杆被动收回。阻尼油缸1腔液压油受压,经过单向阀流向Ⅱ腔。单向阀相比于节流阀同流能力大且压力损失小,因此阻尼油缸活塞杆快速收回,捕捉机构快速复位,为下一次回收水面无人装备做好准备。
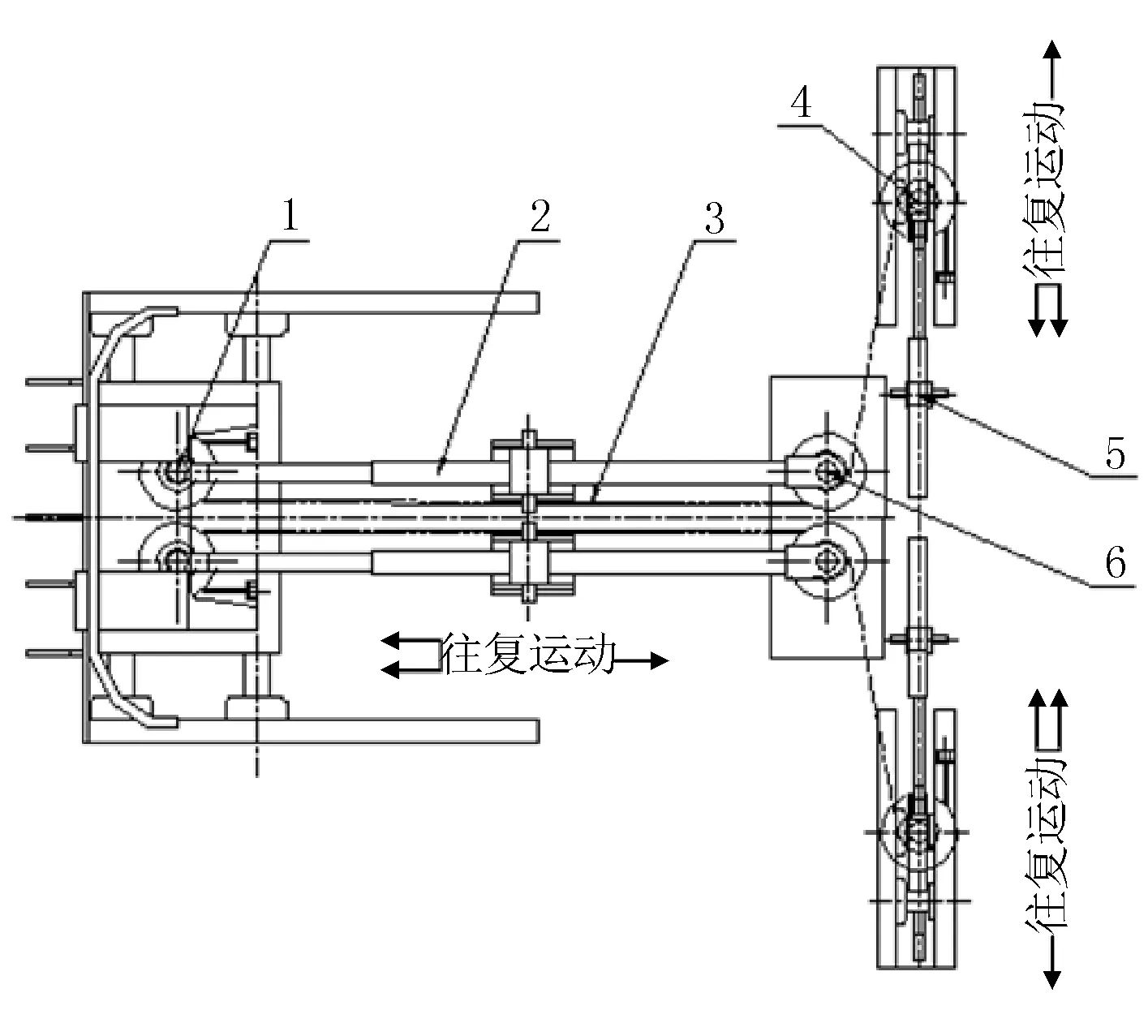
1—移动滑轮组I;2—阻尼油缸;3—传导钢丝绳;4—移动滑轮组II;5—夹持油缸;6—转角滑轮组。
采用阻尼-夹持联动系统是为了保证水面无人装备在回收时更好地校正姿态,保证其能够准确地停放于自动回收位置。阻尼装置及夹持装置均采用了包围式移动轨道设计,保障系统运行可靠。
3 设计数据分析
3.1 水面无人装备初始速度分析
国际海事组织海上安全委员会MSC.81(70)《救生设备试验建议》“5.4 降落试验”规定,母船静水航速不低于5 kn。阻尼系统作用下水面无人装置速度变化值的计算如下:
=-
式中:为水面无人装置航速,参考有人小艇平均经济航速12~15 kn,此处取12 kn;为母船工作时航行速度,参考国内工作艇带航速收放要求,以6.5、7.5、8.5 m等工作艇收放装置带航速收放技术要求为例,其要求为≤10 kn,此处取10 kn。
经计算,=2 kn。
3.2 冲击力分析
水面无人装备撞击联动捕捉机构冲击力的计算如下:
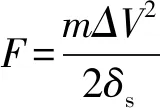
式中:为质量,=5×10kg;为设计阻尼行程,=1 m。
经计算,≈26.5 kN。最终,取30 kN。
3.3 阻尼油缸和夹持油缸分析
在布放工况时,液压系统提供具有一定压力和流量的液压油给夹持油缸的无杆腔,夹持油缸活塞杆伸出,通过钢丝绳将阻尼油缸活塞杆被动收回。联动捕捉机构为空载状态,夹持油缸活塞杆只需要克服自身的摩擦阻力和阻尼油缸缩回的摩擦阻力,几乎无其他外在阻力,此时受力很小,不作考虑。
分析油缸选型的公式如下:
=4π(-)
式中:为阻尼油缸拉压力;为油缸缸径;为油缸杆径。
在回收水面无人装备工况时,阻尼油缸活塞杆受拉力≈30 kN,此时阻尼油缸有杆腔受力(两腔均为有杆腔),夹持油缸为无杆腔受力,两油缸通过钢丝绳联动。初选油缸缸径=63 mm,杆径=35 mm,设计压力为20 MPa,则阻尼油缸拉压力=14 MPa<20 MPa,满足要求。
夹持油缸压力=10 MPa<20 MPa,满足要求。
4 结论
在高海况(3级以上)下进行收放作业,对设备的功能、人员的操作熟练度等软硬件都有很高的要求。通过对联锁机构的使用,在回收水面无人装备时,可使被回收设备较快速地进入捕捉区域,并保持相对稳定的姿态,便于后续回收工作的开展。简单的联动体系,可减少人员和元器件的干预,提高作业安全性、系统可靠性。
(1)阻尼与夹持系统形成联动,提高了校正水面无人艇回收姿态的效率。
(2)联动捕捉机构采用防腐、防水设计,具备在水中浸没状态执行动作的能力。
(3)联动捕捉机构采用模块化设计,具备分级适应性,满足不同水面无人装备的自动捕捉需求。
