HY-600型植保无人机系统组装及调试
2022-08-15张峰
张 峰
(威海职业学院 交通学院,山东 威海 264203)
0 引言
随着人工智能技术不断发展,在诸多领域取得了一定研究成果,无人机作为人工智能发展的一项重要研究成果,当前在军事、民用等各个领域得到广泛应用。植保类无人机以其作业效率高和方便快捷等优点,在农业生产中更是具有广阔发展前景,但农业植保无人机也存在一系列问题,较为突出的问题集中体现在技术专业化程度不高、后期维修维护弱等[1-2]。
因此,急需大力推广普及无人机在农业植保方面的相关知识内容,为农业生产发展提供保障,本文以威海职业学院交通学院合作企业烟台云都海鹰无人机应用技术有限公司HY-600型植保无人机为例,重点讲解植保无人机系统及调试相关知识。
1 植保无人机简介
植保无人机在我国农业机械市场上的兴起约在2014年左右,主要以多旋翼植保无人机为主,现阶段的植保无人机作业发展较快,深圳大疆植保无人机、极飞P系列无人机在农业无人机市场占据较大比例[3]。
HY-600型植保无人机是烟台云都海鹰无人机应用技术有限公司系列产品,该产品有效解决了复杂山区自主避障、仿地飞行等难题,适用于山地丘陵地带林木精准化防治。HY-600型植保无人机性能特征如下。
展开尺寸:1 075 mm×1 075 mm×490 mm;
折叠尺寸:635 mm×666 mm×490 mm;
药箱容积:16 L;
最大喷洒流量:2 L·min-1;
整机重量:12 kg;
标准起飞重量:35 kg;
空载悬停时间:28 min;
满载悬停时间:15 min;
作业飞行速度:3~8 m·s-1;
抗风能力:6级风;
悬停精度:水平方向±1.5 m,垂直方向±0.5 m;
最大倾斜角度:30°;
最大偏航速度:150(°)·s-1;
最大垂直速度:6 m·s-1。
2 植保无人机系统组成
植保类无人机系统包括飞控系统、动力系统、喷药系统、监测系统等,其中核心系统为飞控系统。HY-600型植保无人机飞控系统采用JIYI K++飞行控制系统,包含主控、LED模块、电源管理模块(PMU)及一个GPS模块。HY-600型植保无人机K++飞控系统连接如图1所示,各接口定义如表1所示。主控在维修安装时需注意以下三点:1)按照主控箭头指示方向安装,并保证安装水平;2)GPS和磁罗盘模块,需远离强磁环境(建议具体使用时架高GPS和磁罗盘模块并保证其水平);3)在使用时,需在遥控器上设置好横滚、俯仰、油门和偏航通道。
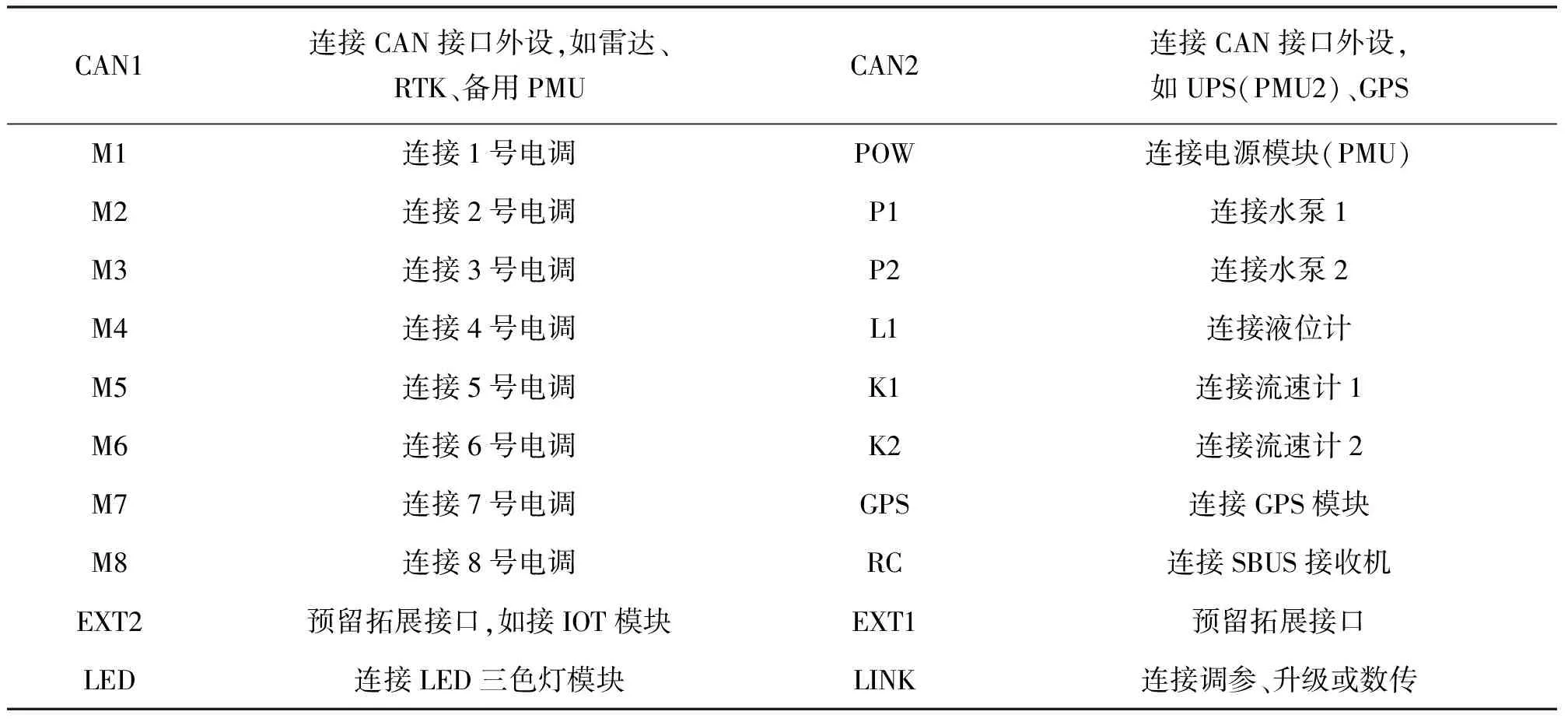
表1 K++飞控接口连接表
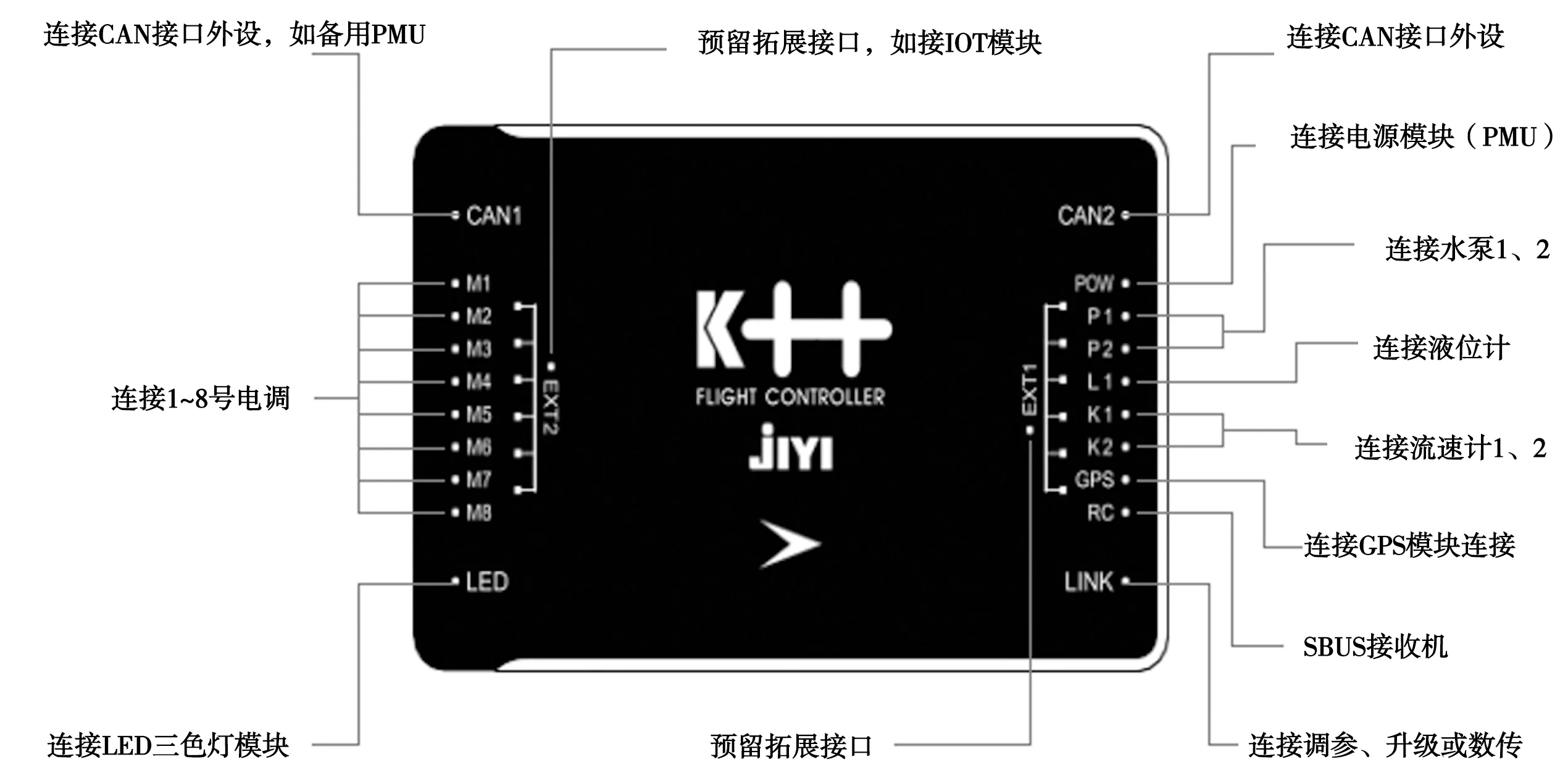
图1 K++飞控系统连接图
植保类无人机系统主要组成部件包括桨叶、无刷电机、电调、电池、机架、飞控、接收器及电源管理模块、GPS及其支架、LED指示灯、遥控器、雾化喷头及输药管路、药箱、药泵、流量监测等,根据飞控系统设计不同还可增设避障、液位计等。以HY-600为例,基本结构组成如图2所示。
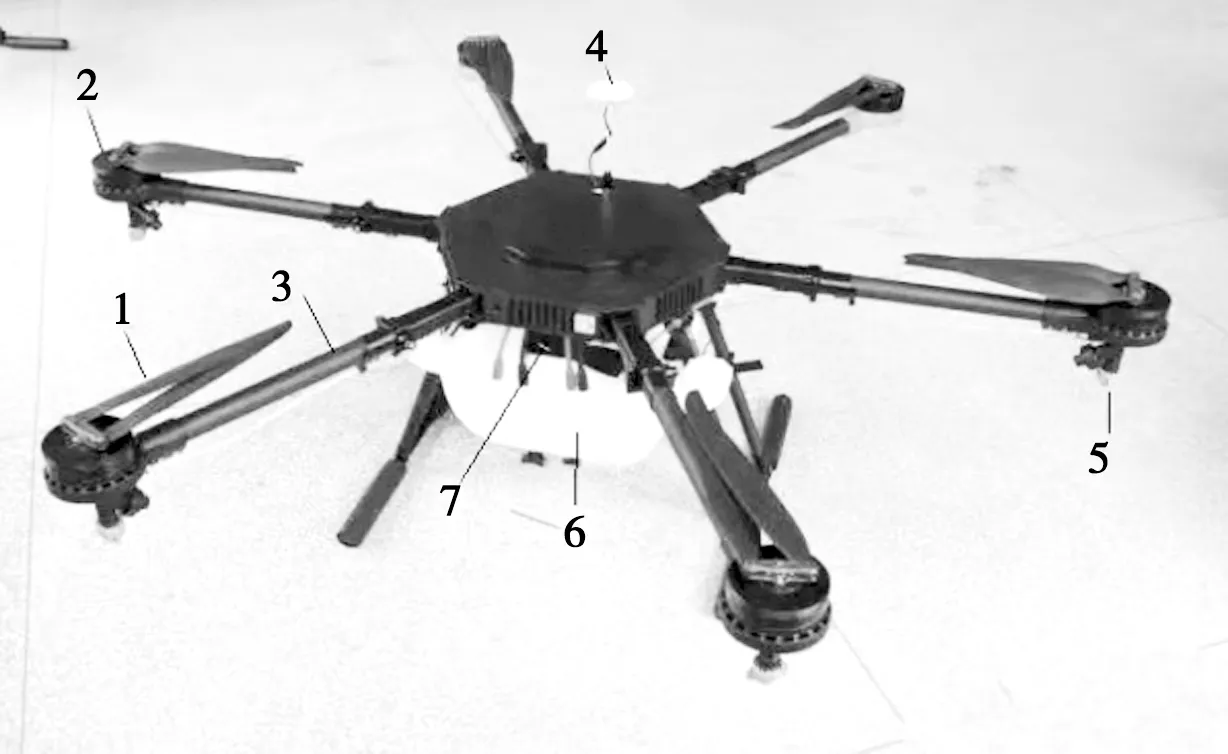
1.桨叶;2.无刷电机;3.机架;4.GPS及其支架;5雾化喷头;6.药箱;7.电池
3 植保无人机调试
3.1 通电调试
以飞控为核心,按照飞控连接图安装完毕后,仔细检查每个线路连接是否正确,检查完毕后,即可进行通电调试,通电调试前,尤其注意正负极是否接反,信号线和负极是否接反,飞控各个插口是否为对应模块。下面以HY-600型植保无人机为例进行详细说明。
1)主电源左右两边各两组插头,通电的时候先接负极再接正极,断电时,先断正极再断负极;
2)通电瞬间检查是否有异样,每个模块指示灯是否正常,是否有模块发热异常,确认每个模块工作正常之后才可进入下一步;
3)遥控器与飞控设置,参考K++飞控和遥控器说明书进行设置,映射遥控器通道,检查正反向,设置飞控基本参数;
4)校准电调,对于普通电调,飞行前务必进行行程校准,对于大疆电调和一些固定行程无法校准的电调则可以跳过这个步骤;
5)检查和调整电机正反转,如果飞控支持软件测试电机则通过软件测试,如果不支持就通过解锁查看,如果发现电机转向不正确,通过任意对调两个电机插头即可,同时注意检查电机转动时是否有异常噪音等;
6)调试完成后可以将喷头、底盖、桨叶按顺序安装上;
7)使用水平尺或者水平气泡校正电机水平。
3.2 软件调试
通电调试合格后,安装螺旋桨及其他附件,根据使用不同飞控进行软件调试,设置好各类参数,具体参考飞控使用说明书,一定要反复检查每一项参数是否正确,在此过程中,一定要注意检查关闭遥控器后的失控保护反馈是否正常。
3.3 外场试飞
通电及软件调试合格后,下一个重要的环节即外场试飞。
3.3.1 试飞前准备工作
1)打开遥控器,将电池放在电池板上并将电池分别用两道绑带绑好,将飞机通电后等待电机自检完成,此过程中禁止触碰飞机;
2)打开飞防管家,通过蓝牙连接飞机后校准磁罗盘。注意选择空旷、信号较强的场地,并将手机、蓝牙耳机等电子产品放置一边,在地面站中找到磁罗盘校准,点击开始校准,飞机水平抬起顺时针旋转一周,飞机机头朝下顺时针旋转一周;
3)检查遥控器通道,打开地面站,在遥控器校准页面中检查通道是否正确,如发现通道未正确请联系售后工作人员远程调试;
4)拨动水泵开关,检查水泵是否正常工作、喷口是否正常喷水如发现水泵未正常运转请联系售后工作人员更换,如喷头未喷水,请松开排气口或清理喷口;
5)查看无人机周围确保没有人和其他遮挡物。
3.3.2 外场试飞
以上各项确认无误后,便可进行试飞工作,应注意遥控器内部参数严禁随意修改,并再次检查机臂展开后尼龙螺母是否拧紧,确保机臂固定安全。外场试飞过程中需注意以下事项:
1)首次试飞建议空载使用姿态模式起飞;
2)GPS模式要等待搜星完成后再起飞;
3)观察起飞是否平稳,有没有侧偏或者其他异常,一旦有异常情况务必立即降落检查;
4)在解锁后低转速状态下,机臂会有抖动现象,属于正常现象,转速提高之后就会消除;
5)起飞之后观察无人机悬停是否稳定,轻打遥控杆观察飞行方向和遥控器是否一致;
6)若出现抖动、晃动就降落调整感度,植保机惯性大,建议不要设置过于灵敏的手感;
7)空机调试完毕之后再加水试飞,加水测试不要一次直接加满,要按3 L、5 L、7 L、10 L逐级添加,观察无人机是否在负载增大后有异常;
8)加水后在地面打开水泵,观察是否可以正常出水,压力喷头雾化是否正常,如果遇到水泵在转但是不出水的情况,一般是泵头内有空气未排出,将泵头出水口的水管拔掉,打开水泵将空气排出等正常出水之后再将水管插上即可;
9)在无人机飞行稳定的前提下可以继续测试飞控的其他功能。
4 结语
综上所述,我国作为农业大国,随着智能化农业设备普及,尤其是植保无人机在现代农业发展作用越来越明显,急需不断完善相关植保机在实际操作、维修、保养等方面的规范性,本文通过实例讲解植保机的组装与调试,对不断提高操作人员理论知识水平,实际应用规范性起到一定参靠价值。
