车载网络技术现状及对比分析
2022-08-15李良斐张银平
0 引言
现如今,汽车的功能越来越多,不再是单纯的交通工具,其数字媒体、辅助驾驶、主动安全、联网通讯等辅助功能也不断出现,推动了整个汽车产业的进步和革新
。相信在不久的将来,机器视觉就能代替驾驶员识别道路信息,智能算法能帮助执行简单的驾驶操作,而多媒体娱乐设备能够为出行提供更温馨舒适的氛围,汽车会更智能、安全和舒适。
支撑这一切进步和改革的基础,主要是信息技术的硬件和软件,这其中很重要的一项是数据通讯,也就是人们常说的车载网络。最初的汽车设备通讯通过金属线和继电器等传输,成本高而且稳定性不好
。从20世纪60、70年代,电子元件在汽车中开始使用并且占据的比重越来越大,汽车电子元件占整车成本比从1990年的8%左右,提高到2010年的39%左右,相应的各种车载电子设备的故障诊断、状态检测数据也越来越庞大,带来的数据通讯压力越来越大
。从20世纪80年代以来,以BOSCH为首的众多汽车厂商,陆续开发了CAN、LIN、MOST、Ethernet、Flex-Ray等通讯协议,以适应不断增加的数据传输压力。
现阶段,车载网络采用了多种通讯协议混合,CAN网络负责总通讯、OBD、电控发动机、ABS等部分,LIN线主要用在车身电器、车窗等低速通讯领域,MOST用来传递多媒体数据,Flex-Ray用在主动安全等方面,以太网协议在近几年被引进到车载网络中,以期替代CAN作为主干网络,来满足毫米波雷达、车联网等技术对通讯速度的更高要求。
1 CAN协议
CAN(Controller Area Network,控制器域网)规范于ISO11898和ISO11519,2005年以后生产的汽车中,绝大部分都采用了CAN,是目前和未来至少5年内,汽车的主流通讯标准。CAN协议由BOSCH公司开发,20世纪80年代就开始在车上运行,应用于大部分发动机、汽车主动安全系统和部分底盘电控系统及车载电器的网络通讯中,并被推广到医疗和工业等领域。
商家回应:么么哒,谢谢思密达,对咱这么高的评价和支持,汤制的狮子头是根据(春夏秋冬四个季节更换的哦),淮扬菜讲究不时不食,也就是每种汤制的狮子头只售卖3个月哦。
如前文所述,CAN总线的通信速率达不到现代汽车对通讯速率和安全性等方面的要求,因此Charles M.Koziero等专家提出了车载以太网的概念。Bob Metcalfe发明的以太网技术,是一种计算机的局域网技术,从20世纪70年代初次应用于个人局域网以来,经历了飞速的发展,以其为延伸,澳大利亚的高校制定并规范了无线协议Wi-Fi,规范于IEEE 802.11,是目前最主流的民用网络通讯手段。经过40多年的发展,现代以太网的传输速度非常高,能达到万兆级别。车载以太网用一对双绞线进行数据传输,与民用的4对双绞线不同,规范于IEEE 802.3bw,也叫100 BASE-T1标准。该标准可以简化车辆各控制模块之间的通讯,进一步优化车身网络结构,并能够淘汰一部分使用场景有限的标准,如D2B和Flex-Ray等。
21世纪初,戴姆勒和Vector等公司牵头成立了Flex-Ray联盟,制定了该协议,规范于ISO17458标准。采用FTDM(Flexible Time Division Multiple Access)技术。Flex-Ray是基于X-by-Wire总线标准指定的,这一标准原应用于航天系统控制中,因其较高的可靠性和容错能力,被引进到汽车行业中,同源的标准还有事件触发协议和Byte-flight协议。Flex-Ray通讯速度可高达10 Mbps,比CAN速度更快,相应成本也更高。Flex-Ray的出现基于汽车主动安全系统中电子线控技术的应用,主要用于汽车底盘的控制中(如线控转向、线控制动等),其数据传送具有灵活性、容错性和确定性高,时延低等优点,以时间触发(Time trigger)为主,也兼顾事件触发,拓扑结构多样。
CAN 控制器根据CAN_L和CAN_H上的电位差来判断总线电平,有显性电平和隐性电平两种,发送方通过使总线电平发生变化,将消息发送给接收方。显性电平对应逻辑0,此时CAN_H和CAN_L电位差为2 V左右,隐性电平对应逻辑1,CAN_H和CAN_L电位差为0。在CAN总线的终端有一个120 Ω的电阻,作用是减少回波反射。
为了满足新技术对通讯速度日益增长的要求,在CAN的基础上,BOSCH又改进制定了CAN-FD和CAN-XL方案,调整了物理层的结构,结合非破坏性仲裁技术,传输速率分别最高到5 Mbps和10 Mbps,字节长度也大大延长,支持最大超过64字节,丰富了报文准确性
。
2 LIN协议
严格来说,以太网技术并不是一个协议,而是IEEE 803.2的一系列标准协议簇。车载以太网拥有传输速度高(实验验证为CAN的12倍左右
)、成本低、低时延、扩展性、兼容性和安全性强等优点,能够满足辅助驾驶、主动安全等现代系统的要求。根据OSI标准模型,以太网的每一层都可以添加防火墙及认证加密的机制,例如传输层的TLS协议,通过TLS,可以进行TCP/IP的节点认证,报文加密和签名等,因此安全性更高。
3 MOST总线
MOST(Media Oriented Systems Transport,面向媒体的系统传输)主要应用在液晶显示、组合仪表、CD、影像和导航等设备上,是高速车载网络技术,可应用于车内和车外类似的多媒体信息传递协议还有IEEE1394和D2B等。MOST采用多簇或环形拓扑结构同步数据,负责车内多媒体信息传递。现在MOST主要由Mircochip公司更新,从其官网可以免费查阅MOST各个版本的标准文件。
车载以太网还可以更便捷高效地实现车联网,应用于ECU的远程刷机、固件升级、行车数据获取和故障诊断等场景,其数据传输速度比传统的CAN等更快,安全性更高。
那些被自己内在目标驱动的人比较不容易损耗自控力,而认为自己是被迫进行自我控制的人以及那些出于讨好和满足他人需求去行动的人更容易耗尽自控力。
4 Flex-Ray
CAN的硬件结构主要包括控制模块、CAN controller、收发器和数据线,通过双绞线进行数据交互,以减少电磁干扰。CAN包含数据帧和遥控帧等5种帧,数据帧由帧起始、仲裁、控制、数据、CRC、ACK和帧结束7个段构成,其报文仲裁、自检等功能完善
,采用破坏性仲裁技术,高优先级的报文基本上没有时延。
借助以太网的技术,ISO开发和制定了DoIP(Diagnostic Communication over IP)协议,即ISO 13400。由于Ethernet比CAN和Flex-Ray等传统通讯方式有更高速率和安全性,从而可在Transport Layer拥有更高的速度,支持更多节点,通过DoIP可以实现更高效的车辆故障预判和诊断,是目前UDS协议的主要研究方向。
Flex-Ray比CAN的通讯方式更复杂,成本也更高,但是其传输速度和安全性的提升有限,大部分厂商还是习惯于以CAN为主的架构,而且CAN阵营也不甘示弱,推出的CAN-XL有最高10 Mbit·s
的传输速度,足以填补CAN FD和车载以太网之间的空缺,而且完全向下兼容传统的CAN,而Flex-Ray与Ethernet成本相近但传输速度不如后者,所以仍没有得到很好的推广。
5 Ethernet
CAN协议完全参照ISO的7层模型制定,包括物理和数据链路等层面。11898和11519在物理层不一样,从而在成本、传输效率上有折中,ISO11898通讯速率为1 Mbps,ISO11519-2速率为最高125 Kbps,属于低CAN,容错性较好,成本相对较高。
LIN(Local Interconnect Network,局域互联网),作为CAN总线的辅助功能,主要用在车窗等不需要高速信号的设备控制上。LIN由汽车厂商合作开发,从2000年左右开始使用,现在采用的版本是LIN2.2,属于串行总线,传输速率低,不超过40 Kbps,硬件上只需要用一根线而不是双绞线,程序逻辑相比I2C或Modbus更加简单,与UART一样,LIN的每个字节中有1个起始位、8个数据位和1个停止位,没有ACK、仲裁段和CRC段,通过奇偶检验位来判断数据的准确性。LIN是单主多从体系架构,从UART接口通讯,也无需单独的晶振来同步,非常适合应用于对传输速度要求不高的场景中。LIN也有一些缺点,例如传输速度低、数据的抗干扰性差等。另外,LIN的节点数不能太多,否则节点带来的阻抗会影响信号的传输,因此,LIN线只能作为CAN网络的分支。
MOST通过光缆或电缆(MOST25,MOST50,MOST150)传递信息,运行速度最高能到50 Mbps,硬件成本高,所以只在部分场景中使用。MOST的时钟绝对同步,数据的传输和提取在发送前明确,所以基本没有时延。MOST的传输线束对环境要求更高,温度、振动和电磁兼容性等方面都要兼顾,例如,采用光缆传导时,曲率半径应不低于25 mm,光缆布置的时候,若光导纤维弯折过度,就会使信号减损。
本文设计了以可调衰减器和定向耦合器为核心器件的发射机互调发射测量链路,建立了基于衰减量调节的互调发射抑制比测量方法,并以某型电台为实验对象,对fc=|ft±fj|、fc=|2ft±fj|、fc=|3ft±fj|、fc=|2ft±2fj|和fc=|2fj±ft|等10种互调发射类型的互调发射抑制比进行了测量.所有测量结果均符合本文的分析结论,说明本文提出的测量方法是合理可行,测量结果准确可信.
车载以太网是目前最有希望替代CAN总线的技术,相信在不久的将来,车载以太网会伴随着智能汽车实现应用。
在对大级别浪形进行划分后,我们对明年的行情有了个最基本的判断和掌握。那么我们再来看一下当前的小级别的浪形如何来进行划分。
6 OBD和UDS
OBD最初是为监控排放相关的系统,由美国和欧洲指定的标准,全称是Onboard Diagnose,规范于ISO 15031(Road vehicles—Communication between vehicle and external equipment for emissions-related diagnostics)。起初OBD通过K线进行通讯,现在大多经过CAN总线。车载网络诊断协议现代汽车强制配备的一项功能,用户和后市场从业人员可以通过OBD通用接口访问和控制ECU和VCU,进行相应的故障读取、诊断和功能测试等操作。
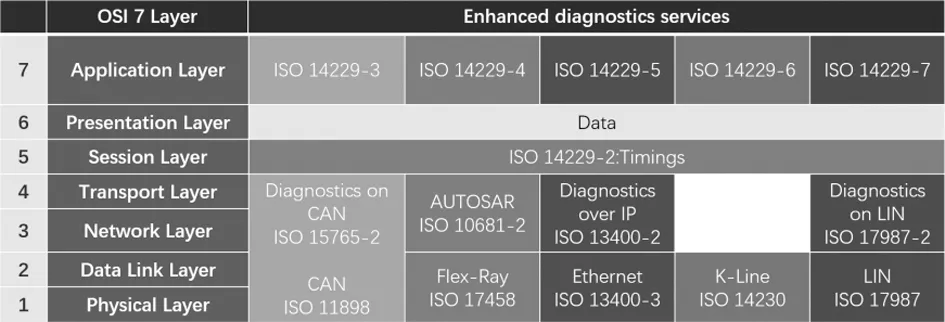
与OBD相类似的还有一套基于CAN的车载故障诊断协议UDS(Unified Diagnostic Services),上述的各类通讯协议互不兼容、各有优劣,汽车制造商为了提高性能和降低成本,在车上都搭载了多种通讯方式,这给OEM(Original Equipment Manufacture)和下游的厂商增加了很多不必要的成本,随着技术的发展,这种情况可能会越来越严重。UDS的出现就是为解决这个问题,它把各种通讯协议和原理汇编为一个ISO标准。在OSI模型的七层中,UDS定义了基于各种协议的应用,如图1所示,涵盖了CAN、Flex-Ray和Ethernet等主流通讯方式,通常来讲,排放相关的车辆是需要同时支持以上几种协议的。
《中国移动互联网发展报告(2017)》蓝皮书调查数据显示,我国移动互联网用户规模连续三年保持11%左右增长率。2016年一季度,移动端阅读人数较桌面电脑端多2 000万人。随着移动通信技术的研发与应用,主流移动手机终端己具备流畅接收与处理图片、音频、视频等多媒体资源的能力。人们可以不受时空限制获取信息,学习形式呈现碎片化特点,移动学习(M-Learning)兴起。移动学习是利用无线网络技术,通过智能手机、个人数字助理PDA等无线移动通信设备获取教育信息、教育资源和教育服务的一种新型数字化学习形式[2]。
7 其他类型的车载网络传输协议
车载网络的通讯手段种类繁多,很多厂商为此付出了大量努力,也有一些标准曾经风靡一时又逐渐被淘汰,这其中应用最多的是K线,但是K线通讯速率太低,无法满足目前车载网络的需求,已被逐步淘汰。
SAE也推出了一种汽车传感器与 ECU 通信的新标准SAE J2716,简称SENT(Single Edge Nibble Transmission,单边半波传输)。该标准具有成本低、逻辑简单且抗干扰等优势,但是SENT是连续单向传输,因此应用范围有限。奥托立夫和BOSCH等公司还协同制订了PSI5协议,该协议硬件成本低,抗干扰性好,主要应用在外设气囊等安全部件上。
由旅游外语系教师管理,并聘请前厅和客房经理负责公寓的运营,下设“接待服务部”负责日常管理运行,并配备了稳定的勤工助学队伍。
(2)问卷调查:可用于小组成员之间的自评、互评,同时教师也可对本组学生的表现进行综合评价,多采用自行设计问卷,涉及对教学形式的态度、在本次教学中的投入和参与程度、学习效果、能力的提高、评判性思维、分享精神、教师的作用、PBL教案评价等方面[10]。
还有一些已经基本销声匿迹的网络通讯手段,例如UART、通用的E&C、克莱斯勒的CCD、福特的ACP和丰田的BEAN等,还有诸如蓝牙、IEEE 802.11、Safety Bus、IDB和物联网等应用不是特别广泛的协议。目前,蓝牙主要应用在音乐等场景中,基于Wi-Fi和物联网的协议应用也并不多,不过其在Car-Play等车载软件应用中很有前景,可以实现安全高效的手机车辆通讯、车联网,甚至取代传统的汽车钥匙来控制车辆。或许在不久的将来,随着车载以太网的发展和安全性的提高,这会是最有潜力的协议之一。
8 结语
总体来看,目前的车载网络技术种类繁多,标准各异,车载网络的标准制定和推广任重道远,既要考虑传输效率和抗干扰能力,又要兼顾安全性、成本等诸多因素。车辆网、车辆大数据平台、智能辅助驾驶等技术已经是大势所趋,在这个群雄纷争的领域,相信时代会大浪淘沙,留下最适合汽车的车载通讯黄金标准,也相信我们国家的汽车行业和高校会在后续的标准制定和推广中,做出不可磨灭的贡献。
[1] 白洋.下一代汽车车载网络中以太网技术的性能研究[D].长沙:湖南大学,2016.
[2] 于晨斯.现代汽车车载网络技术应用探析[J].科技资讯,2015:11.
[3] 鲁松涛.基于Internet的汽车电子远程诊断技术研究[D].南京:南京航空航天大学,2004.
[4] 张海逢.基于CAN总线的车辆数据采集与远程监控系统研发[D].重庆:重庆大学, 2019.
[5] Charles M.Kozierok, Colt Correa, et al.Automotive ethernet-the definitive guide[M].IntrepidCS.com.2014:77-105.
[6] 张莉,林琳.基于Ethernet的车载BootLoader设计与实现[C]//第19届亚太汽车工程年会暨2017中国汽车工程学会年会论文集,2017:952-955.
