智能农机自动导航系统应用研究
2022-08-15陈爽
0 引言
我国国土面积庞大,北方地区有大面积可以用于农业生产的土地,地势平坦。同时,南部地区农工模式和结构的转变导致了农业集中的趋势,大面积的农业用地数量增加。在这种情况下,仍然使用传统的耕作方法,不仅效率低下,而且需要高额的生产投入,无法促进农业现代化
。例如,作物需要在合适的时间播种,而人工播种的效率低,可能会错过最佳播种时间,这会影响作物生长。农业生产机械化是农业现代化的一个重要因素,我国的农业机械化水平发展迅速,水稻、玉米和小麦三大主粮作物基本可以实现全程机械化,但由于一些地区自然条件,现有的农业机具难以进行作业。因此,进一步提高机器的适应性和自动化程度对实现农业可持续发展至关重要
。
从农户利益的角度出发,合作社一体化是最优的农业产业化模式。合作社能够强有力地在统一时间聚集社员进行新季度的工作安排,灵活又有效地保障农业经济发展,而有效的管理使资源得到合理利用。龙头企业带动农业经济合作模式收纳高质量农产品,使农户手里的农产品发挥了最好的价值,避免了低质量产品的农户产生“搭便车”行为,提高农户种植高质量产物的积极性;在企业内部采用区别定价法,增强了龙头企业与合作社之间的竞争,不仅能够让合作社产生更大的市场份额,还可以让有组织的农业经济得到一步发展。
20世纪90年代末期,精准农业的概念首次被提出,在全球范围内掀起了一阵新的浪潮,也是现代农业发展的必然走向。精准农业对于农业生产规模的扩大、农业生产专业化水平的提高有显著影响。精准农业要求生产过程应该具备更高的农业技术水平。农业机械自动导航作为农业机械自动化及智能化能力的关键组成部分,对于有效降低劳动成本,以及极大程度提高土地适用面积来说是极其重要的
。农机导航系统的真正应用价值应体现在实时性、可靠性和准确性三个方面的特点。
1 智能农机自动导航系统
在常规农业机械的基础上设计了一个包括发动机、液压油箱、转向液压油缸、齿轮液压油泵、安全阀、转向控制器在内的一整套液压系统,与无线卫星接收系统进行配合使用;创建一个硬件仿真平台;对拖拉机的运行情况、导航算法是否精准、编程能力如何等进行研究,为进一步发展应用和改进算法打下坚实基础。
1.1 硬件系统
本研究主要通过拖拉机配备的硬件平台,模拟大型拖拉机的运行状态,并结合软件导航系统,开发农业机械自动导航系统的硬件工具组合。该模型原理如图1所示。
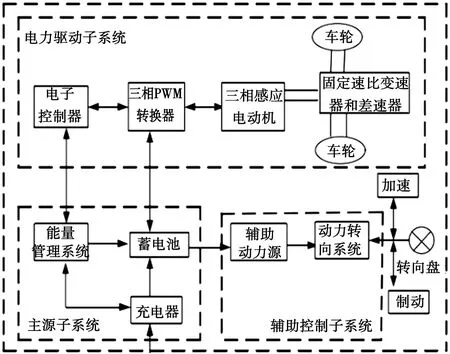
自动导航系统通过GPS定位控制拖拉机的行驶方向和行驶路线,航向追踪是指在拖拉机行驶方向已知的情况下通过控制技术使拖拉机按照目标行驶方向行驶。主要包括以下两方面:
农业机械的液压转向系统是由夹持机构、油缸、油泵、安全阀、单向阀、过滤器、转向器和辅助部件组成。农业机械的动力要求和实际作用决定了液压装置和转向机构的设计构造,可按需选择信号。如果功率大,采用开芯无反应转向,方向盘的位置取中,可有效实现独立卸荷;若功率小,采用闭芯转向,方向盘也在中间位置,在变量泵相互匹配后才可以完成卸荷。可编程控制器则是由编程来完成系统的控制。车载接收器接收无线卫星信号后将其信号传输至车载计算机;自动导航软件系统将接收到的信号处理后,将其传输至可编程控制器,由控制器控制液压系统和转向机构及转向角度,实现自动操控。
1.2 软件控制系统
培养城市会展旅游品牌就是为城市制作一张拿得出手的会展旅游名片,有助于提升成都市在游客中的影响力。想要培养成都市的会展旅游品牌,首先要找出成都市的优势产品、优势行业和优势会展。提到成都,人们往往会首先想到国宝大熊猫或者火锅、串串等具有地方特色的美食。成都市可以围绕这些知名的产品打造具有特色的会展项目,会展要具有鲜明的主题特色,定期举办,提供专业的服务,集中资源对会展旅游品牌进行大力营销推广。培养城市会展旅游品牌不仅可以促进成都市的整体会展旅游建设发展,还能提升游客的感知价值。
设计的过程中,以速度变化率为依据,进行自适应PID的设计,利用该控制器可实现航向追踪控制。通过计算先得到拖拉机实际行驶方向与目标行驶方向的偏差,其次将得到的数据输入到控制器的系统,依据拖拉机的实际作业情况控制器可以生成实时调节参数,并通过这些生成的控制参数控制转向机构。
1.3 航向追踪
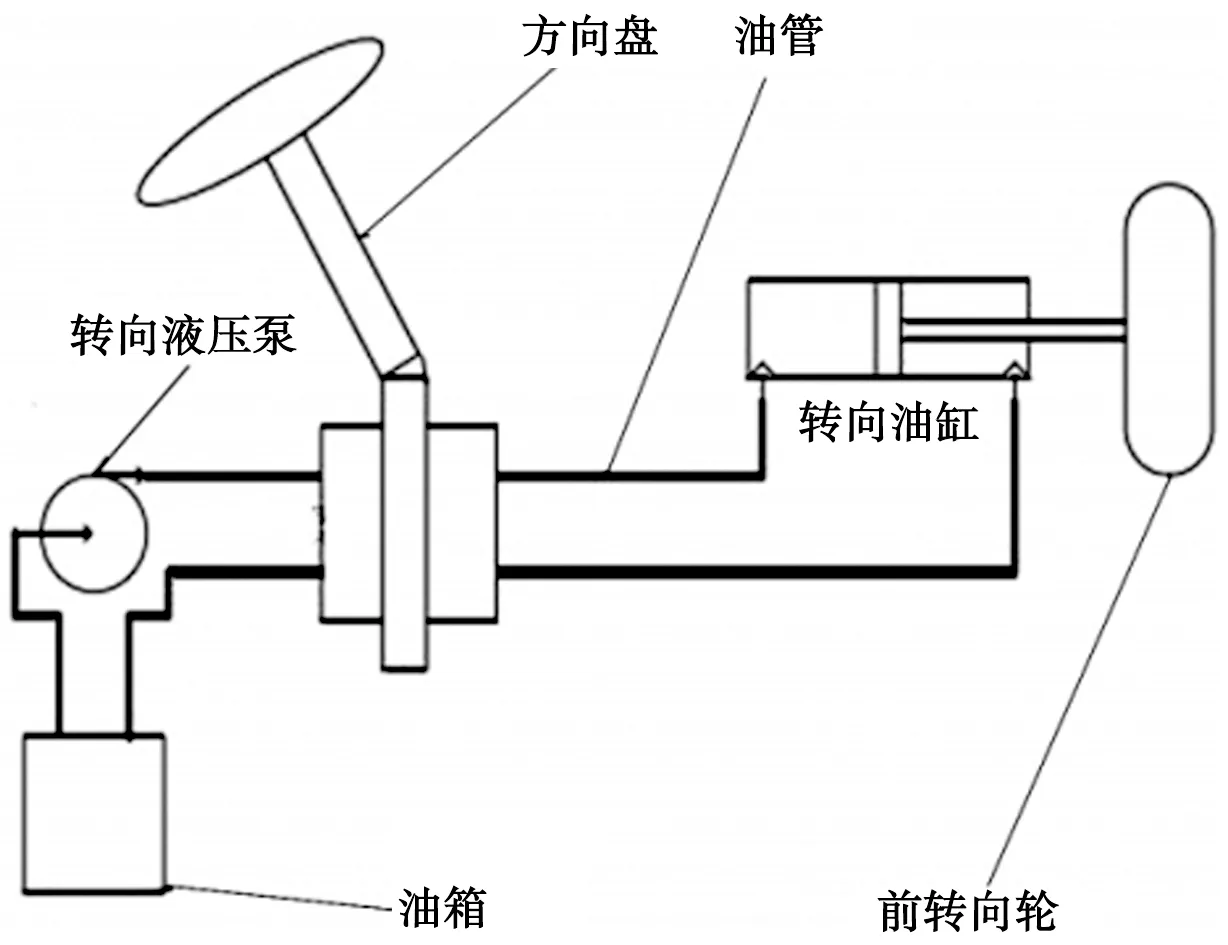
车模系统主要由车身结构、电子控制器、电动机、电源、充电器、转换器等组成,配有一个可拆卸的液压系统,便于进行各种实验。其主要功能是:1)车身。由车架、车轮、方向盘、指示灯、座椅、喇叭、反光镜等共同组成。2)电动机。该电动机是三相异步型,是该型号的供电单元。3)中央控制器。可以控制电机的启动与停止、转动速度和转动的方向。4)电池。该模型所需的电源和照明功率由电池提供。目前,拖拉机大多由液压系统控制转向。该模型液压转向系统结构如图2所示。
该软件设计对于拖拉机自动导航系统操作的便利性有显著的积极影响,而且能够利用软件调节校正,增强算法的稳定性,实现拖拉机行走路径控制和作业精度控制。软件在进行工作过程中,控制界面上可以动态实时地显示追踪结果,可以在对话框随时调整拖拉机的行驶路线;通过计时器结合算法可以推算拖拉机的行走路径,在系统中自动制定下一个时间单元的行驶路线和方向。
1.1 换元基础上的数形结合法 换元思想是指通过变元或式表示、代替或转换为某些确定的数学对象,将数学问题化繁为简、化难为易,从而达到化未知到已知的终极目标的一种思维倾向。换元思想的本质是映射转移,或者说就是引进某种新的映射,对原给定的函数进行分解或实施复合,它的理论依据是等量代换〔2〕。
2)通过PID实现自适应速度控制。拖拉机在实际行驶中可能会发生下面几种情况:①匀速行驶;②进行转弯时,速度逐渐降低;③拖拉机在曲线行驶时,随着曲率的变化速度也一直在改变;④行驶结束时,速度逐渐降低并平稳停止。
1)利用PID技术规范行驶路线。PID控制是线性控制技术,算法极其繁琐,但是控制质量精准。根据校正的方式将其分为三个部分,分别为比例校正、微分校正和积分校正。比例校正是指通过比例对系统的误差做出反应,并及时规范控制器正确工作,以减小系统误差;调节速度与比例系数之间呈正比;最后通过积分校正部分对系统内部稳态误差实现彻底清除。清除质量与积分常数呈现正比关系,清除过程中容易发生稳定性变差和振荡等问题。因此,在微分校正部分需要依据误差信号进行应对,在误差信号变大前需要输入早期矫正信号,这样可以减少调节时间,系统响应速度也会有一个大的提升。
取2016年3月—2018年6月我院收治的CT增强扫描患者106例,研究组(53):男33例,女20例,年龄9~84岁,平均年龄为(68.83±11.25)岁;对照组(53):男32例,女21例,年龄10~86岁,平均年龄(68.92±11.34)岁。各资料无差异(P>0.05),可比。
1.4 路径追踪
路径跟踪分为三个步骤:第一,得到拖拉机和预定目标之间相关联的动态参数;第二,确定机动控制的范围;第三,对其做出精确的控制操作。在实际作业过程中,通过位置信息接收器接收到与预定目标之间相关联的动态参数,并以这些参数作为基本信息进行研究分析;设置一个预览点,得到两个参数:横向跟踪的误差和路线的纵向偏差,通过方案算法得出最合适的控制动作,并在指定时间执行该控制动作;机器的运动状态参数在运行中是连续循环传输给系统控制的动态过程。
2 田间试验
2.1 试验设计
为了验证所设计的自动导航系统的精度和可靠性,在田间分别进行了播种和覆膜作业试验。试验将手动驾驶和自动驾驶两种驾驶模式进行对比,五种速度设定为8 m·s
、9 m·s
、10 m·s
、11 m·s
和12 m·s
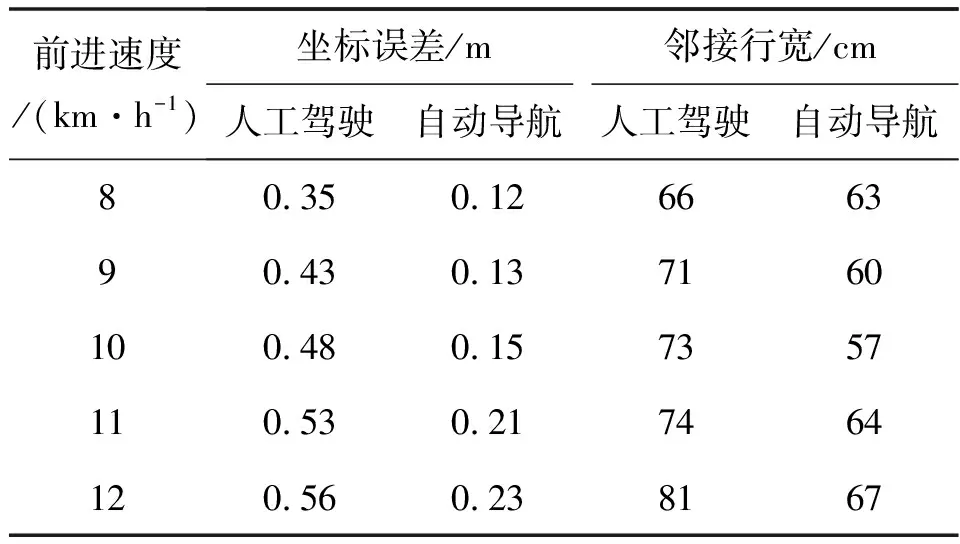
。每个速度下,在设定的路线上行走200 m,然后在路线上随机选择30个点。播种时人工测量播种误差,相邻行宽(标准60 cm)在覆土时测量。坐标误差是指实际坐标与理论坐标之间的偏差,可以反映出导航的作业精度。行宽是指相邻两条垄行之间的距离,可以反映出土地利用率指标。试验现场如图3所示。

2.2 试验结果和分析
田间试验的结果如表1所示。随着拖拉机运行速度的提高,人工驾驶播种的精度也在下降,最终坐标误差达到0.56 m。自动导航的准确性有所下降,但最大的坐标误差只有0.23 m,这在可接受的范围内。在覆膜作业时,随着拖拉机速度的增加,手动驾驶模式下相邻行的宽度也在增加,与标准行宽度的差异也在增加,最终误差达到20 cm。在不同速度的自动导航中,相邻行的宽度几乎不偏离设定的标准,最大为6 cm,相邻行很少被遗漏,说明土地利用率高。
3 结论
设计了包括发动机、液压油箱、转向液压油缸、齿轮液压油泵、安全阀、转向控制器等配件在内的一整套液压系统,其需与无线卫星接收系统组合使用;依据角度传感器设计实验了一个硬件模拟平台,以便模拟拖拉机的运行状态和情况。该系统被安装在拖拉机上,以验证其在田间播种和覆土试验中的实时和精确导航。结果显示,在不同的速度下,该系统提供了比人工驾驶更好的导航精度和土地利用,并能在技术上支持农业机械的智能化和自动化改造,开辟了广泛的应用。
[1] 朱立安.论智能农机自动导航系统应用研究[J].现代农业研究,2021,27(8):75-76.
[2] 杨柏婷.关于智能农机自动导航系统的应用探讨[J].南方农机,2020,51(21):57-58.
[3] 张漫,季宇寒,李世超,等.农业机械导航技术研究进展[J].农业机械学报,2020,51(4):1-18.
[4] 黄振.智能农机中精准定位的研究与实现[J].微型机与应用,2017,36(23):25-27.
[5] 孙琦.智能农机自动导航系统应用研究[J].农机化研究,2018,40(4):230-233.
[6] 宋春月.无人驾驶拖拉机控制系统设计研究[D].上海:上海工程技术大学,2015.
[7] 罗为林.农业机械导航技术发展分析[J].时代农机,2017,44(12):23-24.
[8] 周岩,王雪瑞.基于WSN的智能农机自动导航控制系统研究[J].计算机测量与控制,2015,23(9):3038-3041.
[9] 高雷,胡静涛,李逃昌,等.以角速度为转向动作反馈的拖拉机自动导航控制系统[J].农机化研究,2015,37(3):25-29.
[10] 朱清山,高广智,牛文祥.农机自动导航驾驶系统及其应用[J].现代化农业,2016,34(5):65-67.
